Objetivo y caso de uso
Qué construirás: Un pequeño filtro LC (inductor + condensador) para limpiar el ruido de una fuente de 5 V que alimenta un Arduino, comprobando la mejora con un osciloscopio.
Para qué sirve
- Reducir el ruido de una fuente conmutada barata antes de alimentar el Arduino.
- Filtrar picos de tensión producidos por motores DC o relés conectados a la misma fuente.
- Mejorar la estabilidad de lecturas analógicas en sensores sensibles (p. ej., potenciómetro o sensor de temperatura).
- Disminuir errores en mediciones del ADC causados por el rizado (ripple) de la fuente.
- Obtener una línea de 5 V filtrada específica para el pin AREF o módulos analógicos externos.
Resultado esperado
- Tensión de entrada sin filtrar con rizado de aproximadamente 50–150 mV pico a pico (Vpp) medida con osciloscopio.
- Tensión de salida filtrada con rizado claramente menor, idealmente < 30–50 mV Vpp.
- Diferencia visible en el trazado del osciloscopio entre “5V_IN” y “5V_FILT” usando la misma escala vertical.
- Arduino funcionando estable, sin reinicios al conectar cargas como motores o relés.
Público objetivo: Aficionados y estudiantes de electrónica que trabajen con Arduino; Nivel: Inicial–intermedio.
Arquitectura/flujo: Fuente conmutada de 5 V → entrada “5V_IN” → inductor en serie + condensador a masa (filtro LC) → salida “5V_FILT” → alimentación de Arduino/AREF, comparando en el osciloscopio antes y después del filtro.
Materiales
- 1 × Arduino Uno (o similar de 5 V).
- 1 × Fuente de 5 V conmutada (cargador USB o similar; ideal si es algo ruidosa).
- 1 × Inductor (bobina) de 100 µH (1 a 470 µH también sirve para experimentar).
- 1 × Condensador electrolítico de 100 µF / 10 V o superior (para el filtro).
- 1 × Condensador cerámico de 100 nF (0,1 µF) (en paralelo con el electrolítico, opcional pero recomendado).
- 1 × Protoboard (placa de pruebas).
- 6–8 × Cables de puente (jumpers).
- 1 × Multímetro digital.
- 1 × Osciloscopio (recomendado; si no tienes, aún puedes hacer el montaje y usar el multímetro).
- 1 × Carga ruidosa opcional: motor DC pequeño o módulo de relé de 5 V.
- 1 × Diodo flyback (por ejemplo 1N4007) si usas motor o relé (protección básica).
Guía de conexionado
Estas conexiones definen exactamente el esquema que verás en la siguiente sección.
- Alimentación primaria (sin filtrar)
-
- Conecta el polo positivo de la fuente de 5 V al nodo llamado
5V_IN.
- Conecta el polo positivo de la fuente de 5 V al nodo llamado
-
- Conecta el polo negativo de la fuente de 5 V al nodo
GND(masa común del circuito y del Arduino).
- Conecta el polo negativo de la fuente de 5 V al nodo
-
Filtro LC
-
- Conecta el inductor [L1] 100 µH entre el nodo
5V_INy el nodo5V_FILT(salida filtrada).
- Conecta el inductor [L1] 100 µH entre el nodo
-
- Conecta el condensador electrolítico [C1] 100 µF entre el nodo
5V_FILTyGND(respeta la polaridad: + a5V_FILT, − aGND).
- Conecta el condensador electrolítico [C1] 100 µF entre el nodo
-
- Conecta el condensador cerámico [C2] 100 nF también entre el nodo
5V_FILTyGND.
- Conecta el condensador cerámico [C2] 100 nF también entre el nodo
-
Alimentación del Arduino con tensión filtrada
-
- Conecta el pin “5V” del Arduino al nodo
5V_FILT.
- Conecta el pin “5V” del Arduino al nodo
-
- Conecta un pin “GND” del Arduino al nodo
GND.
- Conecta un pin “GND” del Arduino al nodo
-
Carga ruidosa (opcional, para ver el efecto del filtro)
-
- Conecta uno de los terminales del motor o relé al nodo
5V_IN.
- Conecta uno de los terminales del motor o relé al nodo
-
- Conecta el otro terminal del motor o relé al nodo
GND.
- Conecta el otro terminal del motor o relé al nodo
-
- Coloca el diodo [D1] 1N4007 en paralelo con la carga ruidosa: ánodo al nodo de la carga que va a
GND, cátodo al nodo de la carga que va a5V_IN.
- Coloca el diodo [D1] 1N4007 en paralelo con la carga ruidosa: ánodo al nodo de la carga que va a
-
Puntos de medida en el osciloscopio
-
- Canal 1 (CH1) del osciloscopio: punta de prueba al nodo
5V_IN, pin de masa (cocodrilo) aGND.
- Canal 1 (CH1) del osciloscopio: punta de prueba al nodo
-
- Canal 2 (CH2) del osciloscopio: punta de prueba al nodo
5V_FILT, pin de masa aGND.
- Canal 2 (CH2) del osciloscopio: punta de prueba al nodo
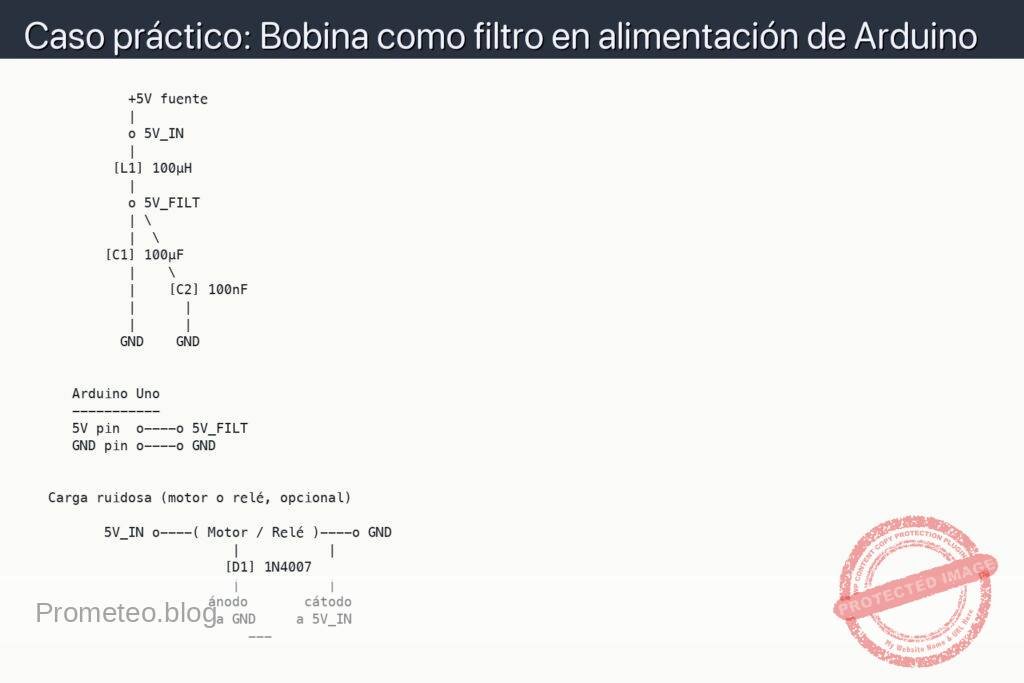
Esquemático
+5V fuente
|
o 5V_IN
|
[L1] 100µH
|
o 5V_FILT
| \
| \
[C1] 100µF
| \
| [C2] 100nF
| |
| |
GND GND
Arduino Uno
-----------
5V pin o----o 5V_FILT
GND pin o----o GND
Carga ruidosa (motor o relé, opcional)
5V_IN o----( Motor / Relé )----o GND
| |
[D1] 1N4007
| |
ánodo cátodo
a GND a 5V_IN
---
Mediciones y pruebas
-
Verificación básica de tensión con multímetro
- Mide la tensión entre
5V_INyGNDcon el multímetro en modo VDC: deberías leer alrededor de 5 V (la tensión real de tu fuente). - Mide la tensión entre
5V_FILTyGND: debería ser prácticamente la misma (pérdida muy pequeña en la bobina). - Si la caída de tensión entre
5V_INy5V_FILTes > 0,2–0,3 V sin carga fuerte, revisa conexiones o si el inductor se está calentando.
- Mide la tensión entre
-
Medida del ruido con osciloscopio en la entrada (V_IN)
- Configura el osciloscopio en modo AC acoplado (si tu modelo lo permite) en el canal CH1 y conéctalo a
5V_IN(punta) yGND(masa). - Ajusta la escala vertical a algo como 20 mV/div o 50 mV/div para ver pequeños rizados.
- Observa la forma de onda: el ruido/rizado serán pequeñas “ondas” o dientes de sierra superpuestos a la tensión de 5 V.
- Estima el valor pico a pico del rizado: por ejemplo, 100 mVpp (milivoltios pico a pico). Esta medida de rizado la llamaremos “Vpp_IN”.
- Vpp_IN significa “tensión pico a pico en la entrada sin filtrar”, es decir, la diferencia entre el valor máximo y mínimo del ruido sobre la línea de 5 V.
- Configura el osciloscopio en modo AC acoplado (si tu modelo lo permite) en el canal CH1 y conéctalo a
-
Medida del ruido con osciloscopio en la salida filtrada (V_FILT)
- Configura el canal CH2 del osciloscopio y conéctalo igual que antes pero en
5V_FILTyGND. - Usa la misma escala vertical que en CH1 para poder comparar directamente.
- Observa la forma de onda: debería ser notablemente más “plana” que la de
5V_IN. - Mide el rizado pico a pico en el nodo filtrado (lo llamamos “Vpp_FILT”).
- Vpp_FILT significa “tensión pico a pico en la salida filtrada”; compárala con Vpp_IN. Criterio de éxito: Vpp_FILT < 0,5 × Vpp_IN (al menos un 50 % menos de rizado).
- Configura el canal CH2 del osciloscopio y conéctalo igual que antes pero en
-
Prueba con carga ruidosa (motor o relé)
- Con el motor o relé conectados a
5V_IN, enciende/apaga la carga (por ejemplo, con un interruptor sencillo en serie con el motor). - Observa en CH1 cómo aparecen picos más grandes al conectar y desconectar la carga.
- Observa en CH2 cómo esos picos están atenuados gracias al filtro LC.
- Verifica que el Arduino sigue funcionando (programa de parpadeo en el pin 13, por ejemplo) sin reinicios cuando la carga conmuta.
- Si tienes un sketch que lea un pin analógico, observa en el monitor serie cómo las lecturas son más estables cuando se alimente por
5V_FILTque si se alimentara por5V_IN(puedes hacer primero una prueba “sin filtro” y luego con el filtro conectado).
- Con el motor o relé conectados a
Explicación básica: ¿qué está haciendo la bobina?
- La bobina (inductor) [L1]:
- Se opone a los cambios rápidos de corriente (no le gusta que la corriente cambie bruscamente).
- Cuando el ruido intenta hacer variar la corriente en la línea de 5 V, la bobina “suaviza” ese cambio.
- El condensador [C1] (y [C2]):
- Ofrece un camino fácil a masa para las variaciones rápidas de tensión (ruido de alta frecuencia).
- Para el ruido, el condensador se comporta casi como un cortocircuito hacia GND, “derivando” el ruido.
- Con la bobina en serie y el condensador a masa se forma un filtro pasabajos LC:
- Las variaciones de alta frecuencia (ruido) se atenúan.
- La componente de baja frecuencia (la tensión DC de 5 V) pasa prácticamente sin cambios.
Errores comunes
- Conectar el condensador electrolítico al revés:
- El terminal “−” debe ir a
GNDy el “+” al nodo5V_FILT. - Si se invierte, el condensador puede calentarse o dañarse.
- Usar una bobina con corriente admisible demasiado baja:
- Si alimentas muchos dispositivos desde
5V_FILT, asegúrate de que la bobina soporta esa corriente (consulta su hoja de datos). - Dejar el GND del Arduino separado del GND de la fuente:
- Debe existir una masa común; de lo contrario, las medidas serán erróneas y el montaje puede no funcionar.
- Medir el rizado con el osciloscopio mal ajustado:
- Si la escala vertical está en 2 V/div no verás los milivoltios de ruido.
- Asegúrate de trabajar con escalas de 10–50 mV/div y acoplamiento AC si tu osciloscopio lo permite.
Posibles mejoras y variantes
- Probar diferentes valores de L y C:
- Bobinas de 47 µH, 220 µH, 470 µH.
- Condensadores de 47 µF, 220 µF.
- Observa cómo cambian Vpp_IN y Vpp_FILT y la respuesta cuando se enciende/apaga la carga.
- Añadir una resistencia serie pequeña (por ejemplo 1–2,2 Ω) junto con L y C para formar un filtro “pi” (RLC) más amortiguado.
- Filtrar solo la parte analógica:
- Usar
5V_FILTúnicamente para sensores y AREF. - Dejar
5V_INpara la lógica y cargas digitales (módulos, relés, etc.). - Añadir más condensadores cerámicos cerca de los pines de alimentación del Arduino y de los módulos ruidosos:
- Mejora el desacoplo local y reduce aún más el ruido de alta frecuencia.
Con este caso práctico has visto cómo usar una bobina como filtro sencillo de alimentación y cómo comprobar su efecto con mediciones objetivas de ruido.
Más Casos Prácticos en Prometeo.blog
Encuentra este producto y/o libros sobre este tema en Amazon
Como afiliado de Amazon, gano con las compras que cumplan los requisitos. Si compras a través de este enlace, ayudas a mantener este proyecto.
Quiz rápido

Ingeniero Superior en Electrónica de Telecomunicaciones e Ingeniero en Informática (titulaciones oficiales en España).