

Nivel: Básico. Diseña un sistema de control que active una bomba de drenaje si se activa cualquiera de los dos sensores de nivel de agua.
Objetivo y caso de uso
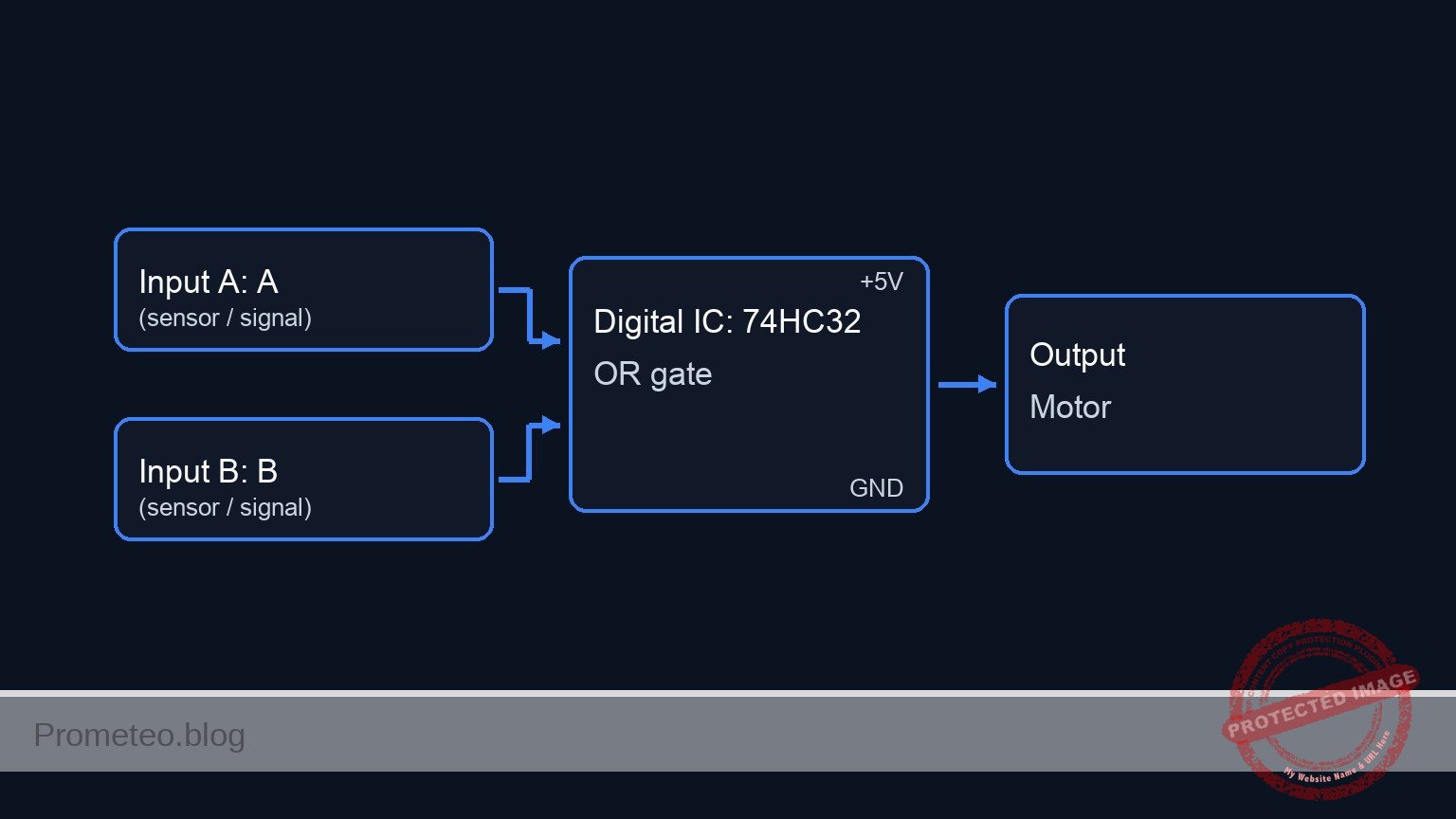
Construirás un circuito de control lógico utilizando una 74HC32 (Compuerta OR) para accionar un motor de CC mediante un controlador de transistor siempre que se detecte agua por al menos un sensor.
Por qué es útil:
* Prevención de inundaciones: Activa automáticamente una bomba de sumidero en un sótano cuando el agua sube a un nivel crítico.
* Seguridad industrial: Previene desbordamientos de tanques drenando líquido si se activan los sensores de nivel alto primarios o secundarios.
* Aplicaciones marinas: Activa la bomba de sentina de un barco si entra agua en el casco por babor o estribor.
* Redundancia: Asegura que la bomba arranque incluso si un sensor falla (siempre que el otro detecte el agua).
Resultado esperado:
* El motor se enciende (ON) si el Sensor A está en ALTO (HIGH).
* El motor se enciende (ON) si el Sensor B está en ALTO (HIGH).
* El motor se enciende (ON) si ambos sensores están en ALTO (HIGH).
* La salida lógica en el pin de la compuerta marca ~5 V (1 lógico) cuando está activa.
* Público objetivo: Estudiantes de electrónica básica y aficionados.
Materiales
- V1: Fuente de alimentación de 5 V CC, función: Alimentación principal del circuito.
- S1: Interruptor SPST, función: Simula el Sensor de Nivel de Agua A.
- S2: Interruptor SPST, función: Simula el Sensor de Nivel de Agua B.
- R1: Resistencia de 10 kΩ, función: Pull-down para el Sensor A.
- R2: Resistencia de 10 kΩ, función: Pull-down para el Sensor B.
- U1: 74HC32 Cuádruple compuerta OR de 2 entradas.
- R3: Resistencia de 1 kΩ, función: Limitación de corriente de base del transistor.
- Q1: Transistor NPN 2N2222, función: Interruptor controlador del motor.
- D1: Diodo 1N4007, función: Protección de retorno (snubber).
- M1: Motor de 5 V CC, función: Simulación de bomba de drenaje.
Pin-out del CI utilizado
Chip: 74HC32 (Cuádruple compuerta OR de 2 entradas)
| Pin | Nombre | Función lógica | Conexión en este caso |
|---|---|---|---|
| 1 | 1A | Entrada A | Conectado al nodo SENS_A |
| 2 | 1B | Entrada B | Conectado al nodo SENS_B |
| 3 | 1Y | Salida | Conectado al nodo GATE_OUT |
| 7 | GND | Tierra | Conectado al nodo 0 (GND) |
| 14 | VCC | Alimentación (+5V) | Conectado al nodo VCC |
Guía de conexionado
Construye el circuito siguiendo estas conexiones de nodos:
- VCC: Conecta el terminal positivo de V1, un lado de S1, un lado de S2, el Pin 14 de U1 y el terminal positivo de M1.
- 0 (GND): Conecta el terminal negativo de V1, el Pin 7 de U1, el Emisor de Q1, la parte inferior de R1 y la parte inferior de R2.
- SENS_A: Conecta el otro lado de S1, la parte superior de R1 y el Pin 1 de U1.
- SENS_B: Conecta el otro lado de S2, la parte superior de R2 y el Pin 2 de U1.
- GATE_OUT: Conecta el Pin 3 de U1 a un lado de R3.
- BASE_NODE: Conecta el otro lado de R3 a la Base de Q1.
- MOTOR_DRIVE: Conecta el Colector de Q1, el terminal negativo de M1 y el Ánodo de D1.
- PROTECTION: Conecta el Cátodo de D1 a VCC (En paralelo con el motor).
Diagrama de bloques conceptual
Esquemático
[ INPUTS / SENSORS ] [ LOGIC CONTROL ] [ ACTUATOR / OUTPUT ]
+----------------+
[ Switch S1 ] | |
[ + R1 (PD) ] --(SENS_A / Pin 1)----->| U1: 74HC32 |
| (OR Gate) |
| |--(GATE_OUT / Pin 3)--> [ Resistor R3 ]
| Logic: | |
[ Switch S2 ] | If A OR B | |
[ + R2 (PD) ] --(SENS_B / Pin 2)----->| Then HIGH | |
| | (BASE_NODE)
+----------------+ |
v
[ Q1 NPN Transistor ]
(Electronic Switch)
|
| (Switches GND)
|
(MOTOR_DRIVE)
|
v
[ Motor M1 + Diode D1 ]
(Connected to VCC)
Tabla de verdad
Esta tabla describe el estado lógico del 74HC32 y la acción física resultante de la bomba.
| Sensor A (Entrada 1A) | Sensor B (Entrada 1B) | Salida Lógica (Pin 1Y) | Estado del Transistor | Estado de la Bomba |
|---|---|---|---|---|
| Bajo (0) | Bajo (0) | Bajo (0) | OFF (Abierto) | OFF |
| Bajo (0) | Alto (1) | Alto (1) | ON (Saturación) | ON |
| Alto (1) | Bajo (0) | Alto (1) | ON (Saturación) | ON |
| Alto (1) | Alto (1) | Alto (1) | ON (Saturación) | ON |
Mediciones y pruebas
- Verificación de alimentación: Antes de conectar el motor, mide el voltaje entre VCC y GND. Debería ser estable a 5 V.
- Estado de reposo: Asegúrate de que ambos interruptores estén abiertos. Mide el voltaje en el Pin 3 (GATE_OUT). Debería ser ~0 V. El motor debería estar detenido.
- Activación del Sensor A: Cierra S1. Mide el voltaje en el Pin 1 (Entrada A). Debería ser 5 V. El Pin 3 debería ponerse en Alto, y el motor debería girar.
- Activación del Sensor B: Abre S1 y cierra S2. Verifica que el motor gire.
- Activación simultánea: Cierra tanto S1 como S2. El motor debería seguir girando.
- Consumo de corriente: Coloca un amperímetro en serie con el motor. Anota el consumo de corriente (típicamente 50mA a 200mA para motores pequeños de hobby).
Netlist SPICE y simulación
Netlist SPICE de referencia (ngspice) — extractoNetlist SPICE completo (ngspice)
* Emergency water pump activation fixed
* --- Power Supply ---
V1 VCC 0 DC 5
* --- Switches & Sensors ---
* S1: Simulates Water Level Sensor A
V_ACT_A ACT_A 0 PULSE(0 5 0 1u 1u 1m 2m)
S1 VCC SENS_A ACT_A 0 SW_MOD
* R1: Pull-down for Sensor A
R1 SENS_A 0 10k
* S2: Simulates Water Level Sensor B
V_ACT_B ACT_B 0 PULSE(0 5 0 1u 1u 0.5m 1m)
S2 VCC SENS_B ACT_B 0 SW_MOD
* R2: Pull-down for Sensor B
R2 SENS_B 0 10k
* --- Logic Gate U1: 74HC32 (Quad OR) ---
* Pin 1: SENS_A, Pin 2: SENS_B, Pin 3: GATE_OUT, Pin 7: GND, Pin 14: VCC
XU1 SENS_A SENS_B GATE_OUT 0 VCC 74HC32_GATE
* --- Driver Stage ---
* R3: Base resistor
R3 GATE_OUT BASE_NODE 1k
* Q1: NPN Transistor Switch
* Collector: MOTOR_DRIVE, Base: BASE_NODE, Emitter: 0 (GND)
* ... (truncated in public view) ...Copia este contenido en un archivo .cir y ejecútalo con ngspice.
* Emergency water pump activation fixed
* --- Power Supply ---
V1 VCC 0 DC 5
* --- Switches & Sensors ---
* S1: Simulates Water Level Sensor A
V_ACT_A ACT_A 0 PULSE(0 5 0 1u 1u 1m 2m)
S1 VCC SENS_A ACT_A 0 SW_MOD
* R1: Pull-down for Sensor A
R1 SENS_A 0 10k
* S2: Simulates Water Level Sensor B
V_ACT_B ACT_B 0 PULSE(0 5 0 1u 1u 0.5m 1m)
S2 VCC SENS_B ACT_B 0 SW_MOD
* R2: Pull-down for Sensor B
R2 SENS_B 0 10k
* --- Logic Gate U1: 74HC32 (Quad OR) ---
* Pin 1: SENS_A, Pin 2: SENS_B, Pin 3: GATE_OUT, Pin 7: GND, Pin 14: VCC
XU1 SENS_A SENS_B GATE_OUT 0 VCC 74HC32_GATE
* --- Driver Stage ---
* R3: Base resistor
R3 GATE_OUT BASE_NODE 1k
* Q1: NPN Transistor Switch
* Collector: MOTOR_DRIVE, Base: BASE_NODE, Emitter: 0 (GND)
Q1 MOTOR_DRIVE BASE_NODE 0 2N2222MOD
* --- Output Load (Motor) ---
* M1: 5V DC Motor simulation (Inductive Load)
* Fixed: Subcircuit name changed from DC_MOTOR_MODEL to DC_MOTOR to match definition
XM1 VCC MOTOR_DRIVE DC_MOTOR
* --- Protection ---
* D1: Flyback Diode
D1 MOTOR_DRIVE VCC 1N4007MOD
* --- Models and Subcircuits ---
* Switch Model
.model SW_MOD SW(Vt=2.5 Vh=0.1 Ron=0.1 Roff=10Meg)
* Transistor Model (Generic 2N2222)
.model 2N2222MOD NPN(Is=14.34f Xti=3 Eg=1.11 Vaf=74.03 Bf=255.9 Ne=1.307 Ise=14.34f Ikf=.2847 Xtb=1.5 Br=6.092 Nc=2 Isc=0 Ikr=0 Rc=1 Cjc=7.306p Mjc=.3416 Vjc=.75 Fc=.5 Cje=22.01p Mje=.377 Vje=.75 Tr=46.91n Tf=411.1p Itf=.6 Vtf=1.7 Xtf=3 Rb=10)
* Diode Model (Generic 1N4007)
.model 1N4007MOD D(IS=7.027n RS=0.03415 N=1.267 EG=1.11 XTI=3 BV=1000 IBV=10m CJO=10p VJ=0.7 M=0.5 FC=0.5 TT=100n)
* Motor Model (Simple RL series)
.subckt DC_MOTOR POS NEG
Rcoil POS INT 50
Lcoil INT NEG 5m
.ends
* 74HC32 Logic Gate Model (Behavioral)
* Implements OR logic: OUT = 1 if (IN1=1 OR IN2=1)
.subckt 74HC32_GATE IN1 IN2 OUT GND VCC
B_OR OUT GND V=V(VCC) * ( (1/(1+exp(-20*(V(IN1)-2.5)))) + (1/(1+exp(-20*(V(IN2)-2.5)))) - ( (1/(1+exp(-20*(V(IN1)-2.5)))) * (1/(1+exp(-20*(V(IN2)-2.5)))) ) )
.ends
* --- Simulation Directives ---
.tran 10u 2.5m
* Print required nodes for validation
.print tran V(SENS_A) V(SENS_B) V(GATE_OUT) V(BASE_NODE) V(MOTOR_DRIVE)
.endResultados de Simulación (Transitorio)

Show raw data table (2750 rows)
Index time v(sens_a) v(sens_b) v(gate_out) 0 0.000000e+00 4.995005e-03 4.995005e-03 2.131385e-21 1 1.000000e-08 4.995005e-03 4.995005e-03 2.131385e-21 2 2.000000e-08 4.995005e-03 4.995005e-03 2.131385e-21 3 4.000000e-08 4.995005e-03 4.995005e-03 2.131385e-21 4 8.000000e-08 4.995005e-03 4.995005e-03 2.131385e-21 5 1.600000e-07 4.995005e-03 4.995005e-03 2.131385e-21 6 3.200000e-07 4.995005e-03 4.995005e-03 2.131385e-21 7 3.600000e-07 4.995005e-03 4.995005e-03 2.131385e-21 8 4.300000e-07 4.995005e-03 4.995005e-03 2.131385e-21 9 4.493750e-07 4.995005e-03 4.995005e-03 2.131385e-21 10 4.832812e-07 4.995005e-03 4.995005e-03 2.131385e-21 11 5.162979e-07 4.999950e+00 4.999950e+00 5.000000e+00 12 5.395702e-07 4.999950e+00 4.999950e+00 5.000000e+00 13 5.611432e-07 4.999950e+00 4.999950e+00 5.000000e+00 14 5.884211e-07 4.999950e+00 4.999950e+00 5.000000e+00 15 6.429769e-07 4.999950e+00 4.999950e+00 5.000000e+00 16 7.520886e-07 4.999950e+00 4.999950e+00 5.000000e+00 17 9.703119e-07 4.999950e+00 4.999950e+00 5.000000e+00 18 1.000000e-06 4.999950e+00 4.999950e+00 5.000000e+00 19 1.030157e-06 4.999950e+00 4.999950e+00 5.000000e+00 20 1.090472e-06 4.999950e+00 4.999950e+00 5.000000e+00 21 1.211102e-06 4.999950e+00 4.999950e+00 5.000000e+00 22 1.452361e-06 4.999950e+00 4.999950e+00 5.000000e+00 23 1.934879e-06 4.999950e+00 4.999950e+00 5.000000e+00 ... (2726 more rows) ...
Errores comunes y cómo evitarlos
- Entradas flotantes: Olvidar las resistencias pull-down (R1, R2).
- Solución: Conecta siempre las entradas a tierra mediante una resistencia (10kΩ) para que tengan un valor predeterminado de 0 V cuando los interruptores estén abiertos.
- Diodo de retorno faltante: Omitir D1 en paralelo con el motor.
- Solución: Las cargas inductivas generan picos de voltaje al apagarse. Coloca siempre un diodo en polarización inversa en paralelo con el motor para proteger el transistor.
- Sobrecarga de la compuerta: Conectar el motor directamente al pin de salida del 74HC32.
- Solución: Las compuertas lógicas solo pueden suministrar corrientes pequeñas (~20mA). Usa un transistor (Q1) para manejar la corriente más alta requerida por el motor.
Solución de problemas
- Síntoma: El motor funciona continuamente incluso cuando los interruptores están abiertos.
- Causa: Las entradas están flotando o el transistor está en cortocircuito.
- Solución: Verifica las conexiones de R1/R2 o reemplaza Q1.
- Síntoma: El CI se calienta mucho inmediatamente.
- Causa: Los pines VCC y GND están invertidos o en cortocircuito.
- Solución: Desconecta la alimentación inmediatamente y verifica el cableado del Pin 14 y el Pin 7.
- Síntoma: La salida lógica está en Alto (5V), pero el motor no gira.
- Causa: La resistencia de base (R3) es demasiado alta o la ganancia del transistor es demasiado baja.
- Solución: Verifica que R3 sea de 1kΩ. Asegúrate de que la fuente de alimentación del motor sea adecuada.
Posibles mejoras y extensiones
- Indicadores visuales: Añade un LED con una resistencia limitadora de corriente en paralelo con el motor para proporcionar una advertencia visual cuando la bomba esté activa.
- Histéresis/Enclavamiento: Reemplaza la compuerta OR con una lógica Latch SR. Esto mantendría la bomba funcionando incluso si el nivel del agua baja momentáneamente, asegurando un ciclo de drenaje completo hasta que un sensor inferior lo reinicie.
Más Casos Prácticos en Prometeo.blog
Encuentra este producto y/o libros sobre este tema en Amazon
Como afiliado de Amazon, gano con las compras que cumplan los requisitos. Si compras a través de este enlace, ayudas a mantener este proyecto.
Quiz rápido

Ingeniero Superior en Electrónica de Telecomunicaciones e Ingeniero en Informática (titulaciones oficiales en España).

