

Nivel: Medio – Diseña un sistema de medición de RPM utilizando un fotodiodo en modo fotoconductivo para detectar interrupciones de luz.
Objetivo y caso de uso
En este caso práctico, construirás un circuito sensor óptico sin contacto que convierte las interrupciones de luz causadas por una hélice giratoria en un tren de pulsos digitales limpios. El sistema utiliza un fotodiodo en polarización inversa (modo fotoconductivo) para detectar cambios en la intensidad de la luz, un comparador para digitalizar la señal analógica y un inversor lógico para hacer de buffer de la salida.
Por qué es útil:
* Sistemas de control de velocidad: Proporciona retroalimentación para controladores PID para mantener una velocidad constante del motor bajo cargas variables.
* Monitoreo de cintas transportadoras: Detecta atascos o paradas monitoreando la rotación de los rodillos de transmisión.
* Detección de fallos en ventiladores: Se utiliza en servidores y equipos industriales para activar alarmas si los ventiladores de refrigeración dejan de girar.
* Medición sin contacto: Permite medir piezas mecánicas de alta velocidad sin añadir fricción ni desgaste físico.
Resultado esperado:
* Generación de señal: Una salida de onda cuadrada (VOUT) donde la frecuencia es proporcional a la velocidad del motor.
* Indicación visual: Un LED indicador parpadea en sincronía con el paso de la aspa de la hélice (visible a bajas velocidades).
* Niveles de voltaje: El voltaje analógico del sensor oscila entre ≈ 0 V (oscuridad) y $>2 V$ (luz), convertido a niveles lógicos TTL de 5 V válidos en la salida.
* Público objetivo: Estudiantes de electrónica y aficionados familiarizados con amplificadores operacionales básicos y semiconductores discretos.
Materiales
Lista de materiales:
* V1: Fuente de 5 V DC, función: Alimentación principal del circuito.
* V2: Fuente de 5 V DC, función: Alimentación para la fuente de luz externa (o compartida con V1).
* D1: Fotodiodo BPW34 (o genérico), función: Sensor de luz (Polarización inversa).
* R1: Resistencia de 100 kΩ, función: Conversión de corriente a voltaje (Resistencia de ganancia).
* RV1: Potenciómetro de 10 kΩ, función: Voltaje de referencia ajustable (VREF) para el comparador.
* U1: Op-Amp LM358, función: Comparador de voltaje.
* U2: Inversor Hexagonal 74HC04, función: Buffer e inversión de señal.
* R2: Resistencia de 330 Ω, función: Limitación de corriente del LED de salida.
* D2: LED rojo, función: Indicador de pulso.
* L1: LED blanco o linterna, función: Fuente de luz externa apuntando a D1.
* M1: Motor DC con una hélice/ventilador, función: Objeto a medir (corta el haz de luz).
Pin-out del CI utilizado
Chip seleccionado: 74HC04 (Inversor Hexagonal)
| Pin | Nombre | Función Lógica | Conexión en este caso |
|---|---|---|---|
| 1 | 1 A | Entrada | Conectado a la Salida del Comparador (VCOMP) |
| 2 | 1Y | Salida | Conectado al Nodo de Salida (VOUT) |
| 7 | GND | Tierra | Conectado a la Tierra del Circuito (0) |
| 14 | VCC | Alimentación | Conectado a VCC (5 V) |
Nota: El pinout del Op-Amp LM358 es estándar (Pin 8: VCC, Pin 4: GND, Pin 3: Entrada no inversora, Pin 2: Entrada inversora, Pin 1: Salida).
Guía de conexionado
Construye el circuito siguiendo estas conexiones de nodos. Asegúrate de que el fotodiodo esté protegido de la luz ambiental para obtener mejores resultados.
-
Nodos de Alimentación:
VCC: Conecta el terminal positivo deV1, el Pin 8 deU1(LM358), el Pin 14 deU2(74HC04) y un lado deRV1.0(GND): Conecta el terminal negativo deV1, el Pin 4 deU1, el Pin 7 deU2, el otro lado deRV1, el Ánodo deD1y el Cátodo deD2.
-
Etapa del Sensor (Modo Fotoconductivo):
VSENS: Conecta el Cátodo deD1(Fotodiodo), un extremo deR1y el Pin 3 (Entrada no inversora) deU1.- Conecta el otro extremo de
R1aVCC. - Nota: Esta configuración crea un divisor de voltaje. Cuando la luz golpea a
D1, fluye corriente inversa, bajando el voltaje enVSENS. Oscuridad = Voltaje Alto (cerca de VCC); Luz = Voltaje Bajo.
-
Etapa del Comparador:
VREF: Conecta el cursor (pin central) deRV1al Pin 2 (Entrada inversora) deU1.VCOMP: Conecta el Pin 1 (Salida) deU1al Pin 1 (Entrada 1 A) deU2.
-
Etapa de Salida:
VOUT: Conecta el Pin 2 (Salida 1Y) deU2a un extremo deR2. Este es tu punto de medición para el osciloscopio.- Conecta el otro extremo de
R2al Ánodo deD2(LED).
Diagrama de bloques conceptual
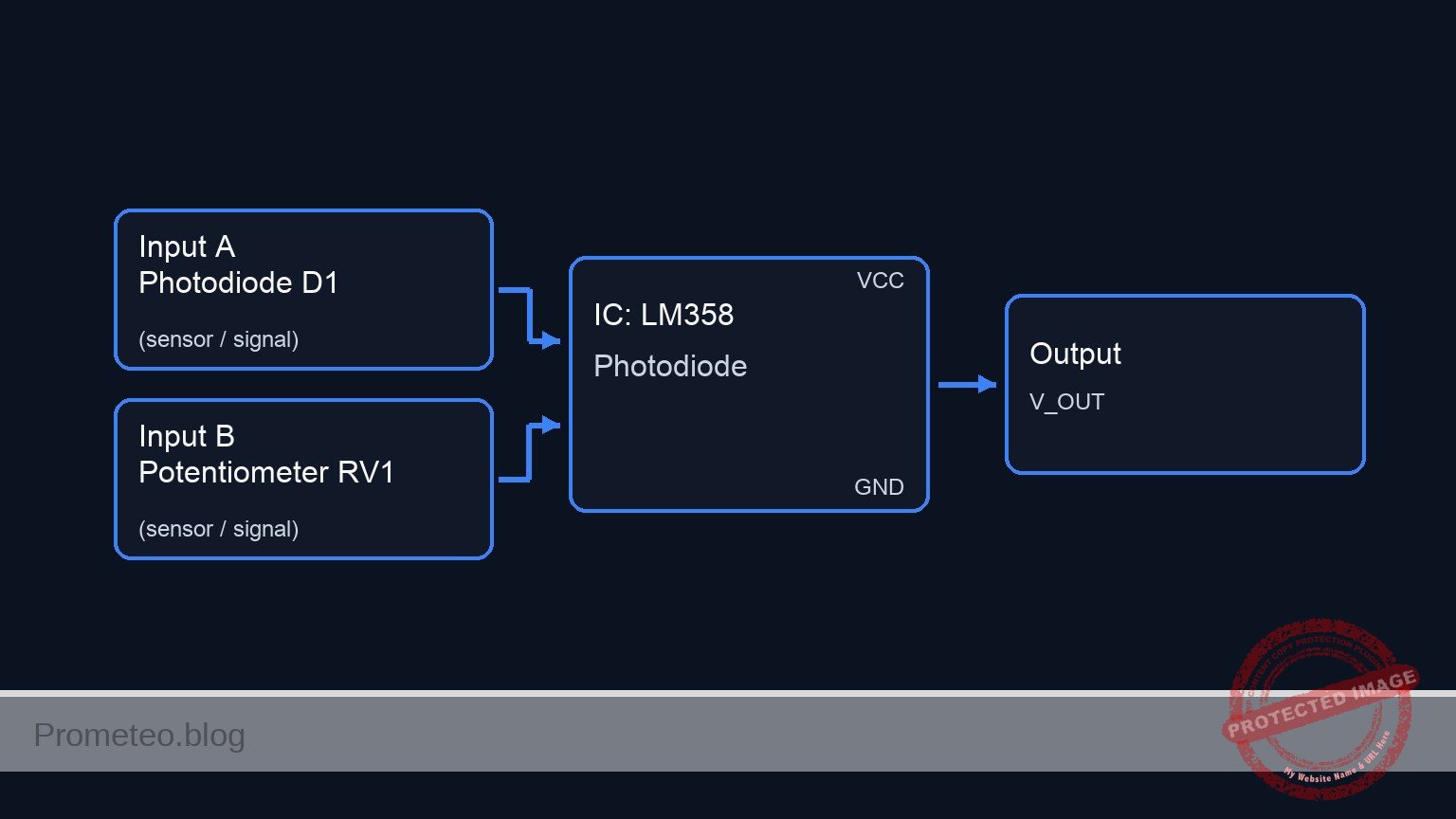
Esquemático
Title: Practical case: Optical tachometer for DC motor
[ INPUTS / SENSORS ] [ LOGIC / PROCESSING ] [ OUTPUTS ]
[ Light Source L1 ]
|
(Light Beam)
|
v
[ Motor M1 (Propeller) ]
|
(Interrupted Beam)
|
v
[ Photodiode D1 ] --(VSENS: Pin 3)-->+----------------+
(Rev-Biased w/ R1) | |
| U1: LM358 |
| Comparator | --(VCOMP: Pin 1)-->+
| | |
[ Potentiometer RV1 ] --(VREF: Pin 2)-->+----------------+ |
(Adjust Sensitivity) |
v
+----------------+
| |
| U2: 74HC04 |
| Hex Inverter |
| |
+-------+--------+
|
(VOUT: Pin 2)
|
+--------(Scope Probe)-->
|
v
[ Resistor R2 ]
|
v
[ LED D2 ]
|
v
(GND)
Tabla de verdad (Etapa lógica)
Esta tabla describe el flujo lógico desde el estado físico hasta la salida eléctrica final.
| Estado de la Hélice | Luz en el Fotodiodo (D1) | Voltaje en VSENS |
Salida Comparador (VCOMP) |
Salida Inversor (VOUT) |
LED (D2) |
|---|---|---|---|---|---|
| Bloqueando Luz | Bajo / Oscuro | Alto (> VREF) | Alto (Lógica 1) | Bajo (Lógica 0) | OFF |
| Paso de Luz | Alto / Brillante | Bajo (< VREF) | Bajo (Lógica 0) | Alto (Lógica 1) | ON |
Nota: Dado que la configuración del sensor lleva VSENS a nivel bajo cuando está iluminado, la salida del Comparador pasa a Bajo cuando hay luz. El 74HC04 invierte esto, por lo que el LED se ENCIENDE cuando la luz pasa a través.
Mediciones y pruebas
-
Calibración (Prueba Estática):
- Enciende el sistema (
V1= 5 V). - Asegúrate de que la fuente de luz
L1brille directamente sobreD1. - Mide
VSENScon un multímetro. Debería ser bajo (ej. 1 V – 2 V) debido a la fotocorriente. - Bloquea la luz con tu mano.
VSENSdebería subir cerca deVCC(ej. 4.5 V). - Ajusta el potenciómetro
RV1para queVREFesté exactamente en el medio de estos dos valores (ej. si Oscuro=4.5 V y Luz=1.5 V, ajustaVREFa 3.0 V).
- Enciende el sistema (
-
Prueba Dinámica:
- Coloca el motor
M1de manera que su hélice corte el haz entreL1yD1. - Conecta el Canal 1 de tu osciloscopio a
VOUT. - Haz funcionar el motor. Deberías ver un tren de ondas cuadradas.
- Coloca el motor
-
Cálculo:
- Mide la frecuencia ($f$) de la señal en
VOUTen Hertz. - Cuenta el número de aspas ($N$) en tu hélice.
- Calcula las RPM: RPM = ≤ft( (f / N) \right) × 60.
- Mide la frecuencia ($f$) de la señal en
Netlist SPICE y simulación
Netlist SPICE de referencia (ngspice) — extractoNetlist SPICE completo (ngspice)
* Practical case: Optical tachometer for DC motor
* ==========================================
* Models and Definitions
* ==========================================
* Photodiode Model (Generic BPW34)
.model D_BPW34 D(IS=10n N=1.1 RS=5 CJO=20p)
* Output LED Model (Red)
.model LED_Red D(IS=1u N=1.8 RS=5 BV=5 IBV=10u)
* External Light Source LED Model (White)
.model LED_White D(IS=1n N=2.5 RS=10 BV=5 IBV=10u)
* Subcircuit: LM358 Op-Amp (Comparator Mode)
* Pins: OUT INM INP GND VCC
.subckt LM358 OUT INM INP GND VCC
* Dummy resistors to ensure DC path for all pins (avoids floating node warnings)
R_supply VCC GND 100Meg
* ... (truncated in public view) ...Copia este contenido en un archivo .cir y ejecútalo con ngspice.
* Practical case: Optical tachometer for DC motor
* ==========================================
* Models and Definitions
* ==========================================
* Photodiode Model (Generic BPW34)
.model D_BPW34 D(IS=10n N=1.1 RS=5 CJO=20p)
* Output LED Model (Red)
.model LED_Red D(IS=1u N=1.8 RS=5 BV=5 IBV=10u)
* External Light Source LED Model (White)
.model LED_White D(IS=1n N=2.5 RS=10 BV=5 IBV=10u)
* Subcircuit: LM358 Op-Amp (Comparator Mode)
* Pins: OUT INM INP GND VCC
.subckt LM358 OUT INM INP GND VCC
* Dummy resistors to ensure DC path for all pins (avoids floating node warnings)
R_supply VCC GND 100Meg
R_inM INM GND 100Meg
R_inP INP GND 100Meg
* Behavioral Output: High (VCC) if INP > INM, Low (GND) otherwise
B_Out OUT GND V = (V(VCC)-V(GND)) * (1 / (1 + exp(-100 * (V(INP)-V(INM)))))
.ends LM358
* Subcircuit: 74HC04 Hex Inverter (Single Gate)
* Pins: IN OUT GND VCC
.subckt 74HC04_Gate IN OUT GND VCC
* Dummy resistors
R_supply VCC GND 100Meg
R_in IN GND 100Meg
* Inverter Logic: High if IN < 2.5V
B_Out OUT GND V = (V(VCC)-V(GND)) * (1 / (1 + exp(100 * (V(IN) - 2.5))))
.ends 74HC04_Gate
* ==========================================
* Circuit Instantiation
* ==========================================
* --- Power Supply Section ---
* V1: 5V DC Supply for the main circuit (VCC)
V1 VCC 0 DC 5
* V2: 5V DC Supply for external components (Motor/Light)
V2 VCC_EXT 0 DC 5
* --- Environment (Physical BOM Components) ---
* L1: White LED (External Light Source)
* Modeled as electrical load on V2. Light emission is implicit.
R_L1 VCC_EXT N_L1 220
D_L1 N_L1 0 LED_White
* M1: DC Motor (Propeller)
* Modeled as electrical load on V2. Rotation is simulated by the chopper signal.
R_M1 VCC_EXT N_M1 20
L_M1 N_M1 0 10m
* Optical Interaction Simulation:
* V_Chopper simulates the propeller cutting the light beam from L1 to D1.
* 1V = Light Passing (Gap), 0V = Light Blocked (Blade).
* Frequency approx 500Hz (2ms period).
V_Chopper V_OPT_LINK 0 PULSE(0 1 0 100u 100u 800u 2000u)
* --- Sensor Stage ---
* R1: 100k Resistor (Pull-up) connecting VCC to VSENS
R1 VCC VSENS 100k
* D1: BPW34 Photodiode
* Wiring: Cathode to VSENS, Anode to GND (Reverse Biased)
D1 0 VSENS D_BPW34
* Photocurrent Injection (Behavioral):
* Represents light hitting D1 when V_OPT_LINK is High.
* Current flows Cathode to Anode (VSENS to GND). I_photo = 50uA.
B_Photo VSENS 0 I = V(V_OPT_LINK) * 50u
* --- Comparator Stage ---
* RV1: 10k Potentiometer (Reference Voltage)
* Configured as 50% divider (5k + 5k) setting VREF to ~2.5V.
R_RV1_Top VCC VREF 5k
R_RV1_Bot VREF 0 5k
* U1: LM358 Op-Amp configured as Comparator
* Pin 8=VCC, Pin 4=GND, Pin 3=VSENS (Non-Inv), Pin 2=VREF (Inv), Pin 1=VCOMP
XU1 VCOMP VREF VSENS 0 VCC LM358
* --- Buffer/Inverter Stage ---
* U2: 74HC04 Hex Inverter (Gate 1)
* Pin 14=VCC, Pin 7=GND, Pin 1=VCOMP (Input), Pin 2=VOUT (Output)
XU2 VCOMP VOUT 0 VCC 74HC04_Gate
* --- Output Stage ---
* R2: 330 Ohm Current Limiting Resistor
R2 VOUT LED_A 330
* D2: Red LED (Signal Indicator)
* Wiring: Anode to R2, Cathode to GND
D2 LED_A 0 LED_Red
* ==========================================
* Analysis Commands
* ==========================================
* Transient analysis: 10ms to capture 5 pulses
.tran 100u 10ms
* Monitor signals
.print tran V(VSENS) V(VREF) V(VCOMP) V(VOUT) V(LED_A) V(V_OPT_LINK)
.endResultados de Simulación (Transitorio)

Show raw data table (526 rows)
Index time v(vsens) v(vref) v(vcomp) 0 0.000000e+00 4.994005e+00 2.499938e+00 5.000000e+00 1 1.000000e-06 4.966501e+00 2.499938e+00 5.000000e+00 2 2.000000e-06 4.926705e+00 2.499938e+00 5.000000e+00 3 4.000000e-06 4.836178e+00 2.499938e+00 5.000000e+00 4 8.000000e-06 4.635945e+00 2.499938e+00 5.000000e+00 5 1.600000e-05 4.238426e+00 2.499938e+00 5.000000e+00 6 3.200000e-05 3.442420e+00 2.499938e+00 5.000000e+00 7 6.400000e-05 1.854804e+00 2.499938e+00 4.799431e-28 8 1.000000e-04 8.527235e-02 2.499938e+00 5.000000e-99 9 1.009874e-04 5.613111e-02 2.499938e+00 5.038370e-99 10 1.029622e-04 1.810390e-02 2.499938e+00 5.069277e-99 11 1.055177e-04 3.702381e-03 2.499938e+00 5.376972e-99 12 1.063053e-04 2.444841e-03 2.499938e+00 6.193694e-99 13 1.072769e-04 1.458053e-03 2.499938e+00 5.050362e-99 14 1.083003e-04 8.469348e-04 2.499938e+00 4.694441e-99 15 1.095417e-04 4.347045e-04 2.499938e+00 5.049162e-99 16 1.109578e-04 2.013374e-04 2.499938e+00 4.883316e-99 17 1.123791e-04 9.296145e-05 2.499938e+00 4.945812e-99 18 1.143288e-04 3.056502e-05 2.499938e+00 4.968802e-99 19 1.167173e-04 7.196143e-06 2.499938e+00 4.988316e-99 20 1.202744e-04 2.927790e-07 2.499938e+00 4.996548e-99 21 1.252257e-04 -3.66547e-08 2.499938e+00 4.999835e-99 22 1.343972e-04 1.488928e-08 2.499938e+00 5.000026e-99 23 1.527400e-04 -9.71180e-09 2.499938e+00 4.999988e-99 ... (502 more rows) ...
Errores comunes y cómo evitarlos
- Polaridad del fotodiodo invertida: En modo fotoconductivo, el fotodiodo DEBE estar polarizado inversamente (Cátodo a potencial positivo relativo al Ánodo). Si se conecta en directa, actúa como un diodo normal y no detectará la luz eficazmente.
- Solución: Verifica el lado plano o el terminal más corto del fotodiodo y asegúrate de que se conecta al nodo
VSENS(que está conectado a VCC vía R1).
- Solución: Verifica el lado plano o el terminal más corto del fotodiodo y asegúrate de que se conecta al nodo
- Voltaje de Referencia (
VREF) incorrecto: SiVREFse ajusta demasiado alto (por encima del voltaje en oscuridad) o demasiado bajo (por debajo del voltaje en luz), el comparador nunca conmutará.- Solución: Siempre mide
VSENSen ambos estados (oscuro y luz) antes de ajustarRV1.
- Solución: Siempre mide
- Interferencia de Luz Ambiental: La iluminación de la habitación (especialmente luces fluorescentes parpadeando a 50/60Hz) puede activar el sensor falsamente.
- Solución: Usa un tubo opaco (termorretráctil o la carcasa de un bolígrafo) alrededor del fotodiodo para estrechar su campo de visión estrictamente a la fuente de luz.
Solución de problemas
- Síntoma: El LED está siempre ENCENDIDO o siempre APAGADO.
- Causa:
VREFno está ajustado correctamente o la fuente de luz es demasiado débil. - Solución: Reajusta
RV1. Asegúrate de queL1sea brillante y esté alineada.
- Causa:
- Síntoma: La señal de salida es inestable o tiene múltiples picos por pulso.
- Causa: Transiciones ruidosas cuando el voltaje cruza el umbral lentamente.
- Solución: Añade una pequeña resistencia de histéresis (ej. 1 MΩ) entre
VCOMPy el Pin 3 deU1, o asegúrate de que la transición óptica sea nítida (haz enfocado).
- Síntoma:
VSENSno cambia significativamente con la luz.- Causa: El valor de
R1es demasiado bajo para la sensibilidad deD1. - Solución: Aumenta
R1a 220 kΩ o 470 kΩ para aumentar la ganancia de voltaje (V = Ifoto × R1).
- Causa: El valor de
Posibles mejoras y extensiones
- Histéresis (Trigger Schmitt): Modifica el circuito del Op-Amp para incluir retroalimentación positiva. Esto crea dos voltajes de umbral distintos, haciendo al sistema inmune al ruido alrededor del punto de conmutación.
- Modo Sensor Reflectivo: En lugar de colocar la fuente de luz opuesta al sensor (transmisivo), colócalos lado a lado. Pinta las aspas de la hélice de negro (no reflectante) y blanco (reflectante). Esto permite medir RPM en motores donde no puedes acceder a ambos lados de las aspas.
Más Casos Prácticos en Prometeo.blog
Encuentra este producto y/o libros sobre este tema en Amazon
Como afiliado de Amazon, gano con las compras que cumplan los requisitos. Si compras a través de este enlace, ayudas a mantener este proyecto.
Quiz rápido

Ingeniero Superior en Electrónica de Telecomunicaciones e Ingeniero en Informática (titulaciones oficiales en España).

