
Caso práctico: UGV Beast ROS2 con cámara en Raspberry Pi 4
Construye un robot patrullero ROS 2 con Raspberry Pi 4 y Camera Module 3, transmitiendo video 720p para monitoreo y seguridad.
Construye un robot patrullero ROS 2 con Raspberry Pi 4 y Camera Module 3, transmitiendo video 720p para monitoreo y seguridad.
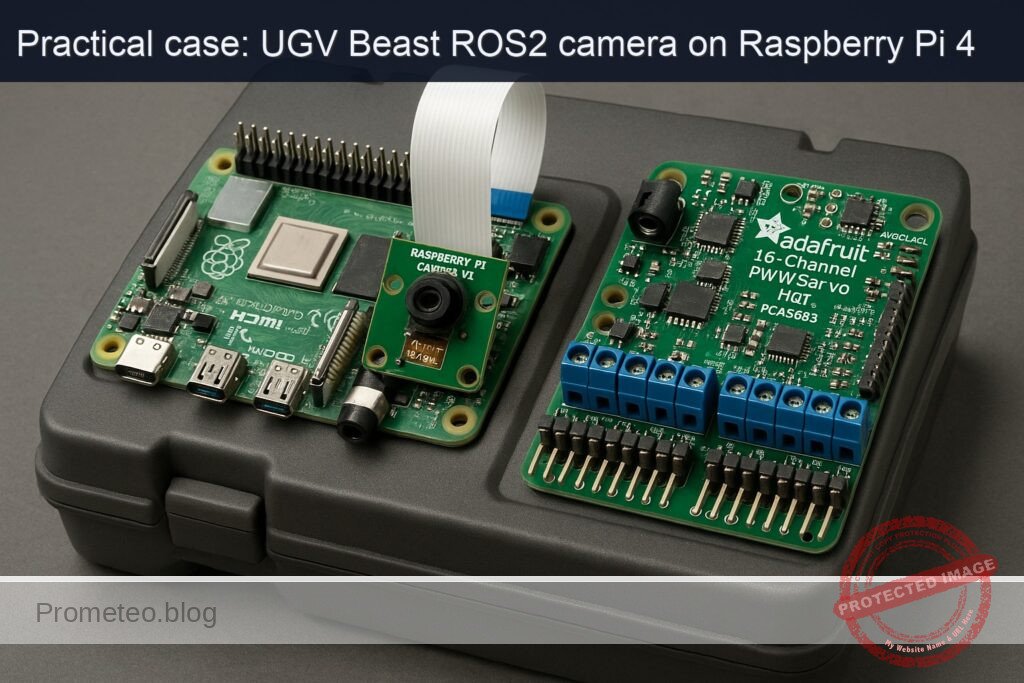
Build a ROS 2 patrol robot with Raspberry Pi 4 and Camera Module 3 for remote monitoring, security, and educational purposes. Stream 720p video easily!

Construye un stack ROS 2 Humble en Raspberry Pi 4 Model B para navegación GPS, fusionando GPS, IMU y odometría para UGV autónomos.
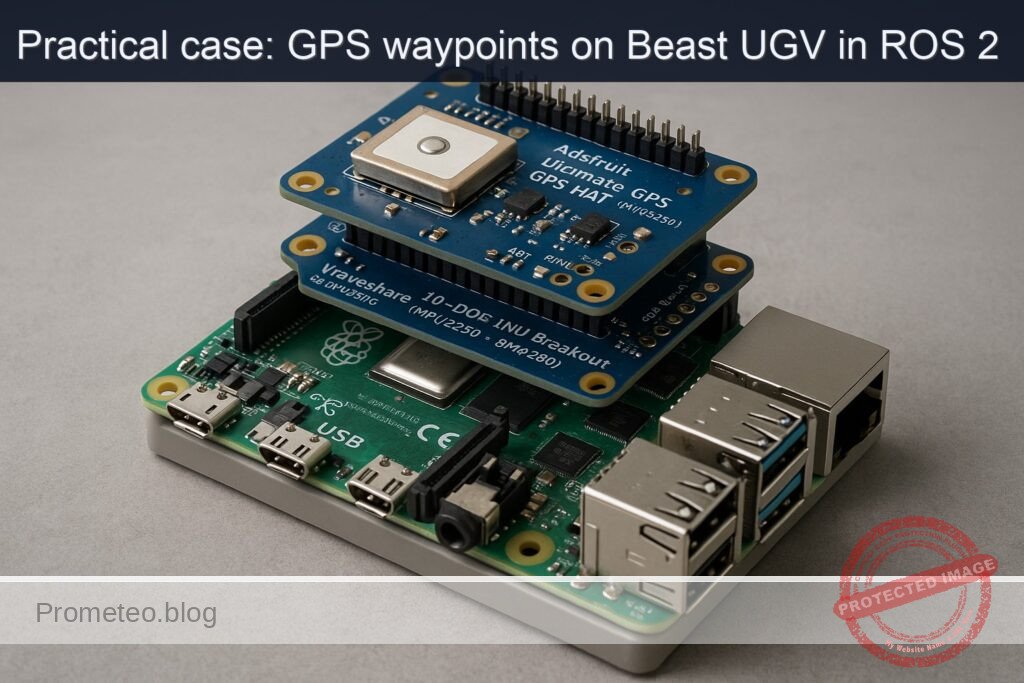
Learn to build a ROS 2 Humble stack on Raspberry Pi 4 for GPS waypoint navigation, fusing GPS, IMU, and odometry for various use cases.

Construye un sistema de teleoperación con joystick en Raspberry Pi 4 y Waveshare 2-CH CAN HAT, logrando control de baja latencia para UGVs.

Build a ROS 2 joystick teleoperation stack for a UGV on Raspberry Pi 4, ensuring real-time control and safe manual testing for robotics applications.
