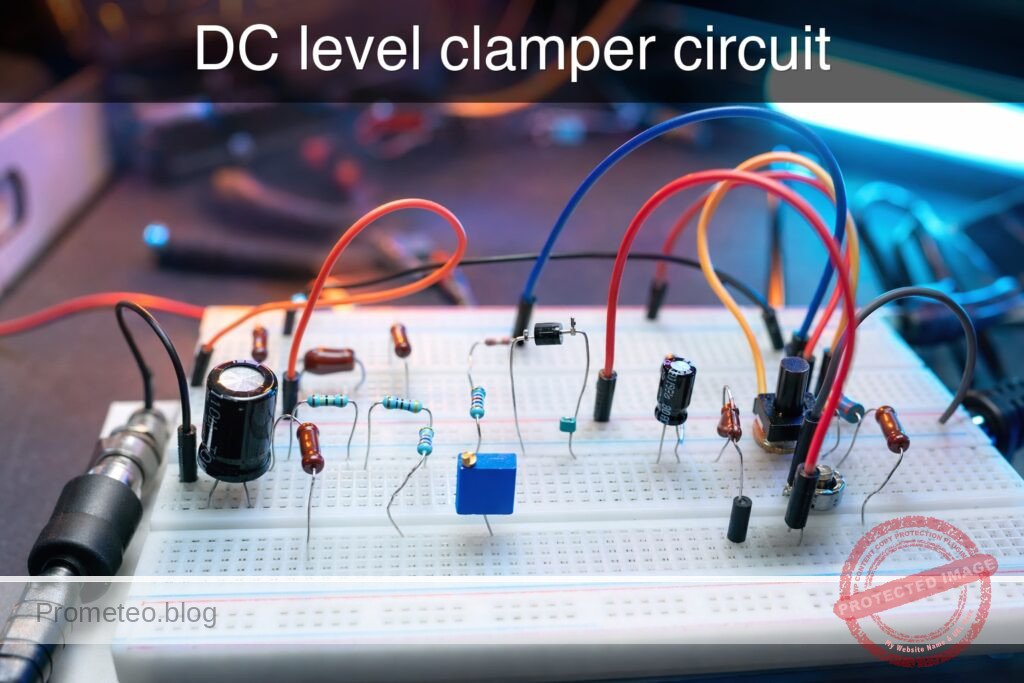
Level: Medium | Understand the shifting of the DC level of an AC signal using a diode and a capacitor.
Objective and use case
You will build a positive diode clamper circuit that takes an incoming zero-centered AC signal and shifts its entire DC level upwards, establishing a new reference baseline.
This circuit is highly useful in various practical applications:
* Restoring DC levels in analog video signals for proper display rendering.
* Protecting the analog input stages of microcontrollers that cannot handle negative voltages.
* Creating the foundational building blocks for voltage multiplier circuits (like charge pumps).
* Biasing AC signals so they can be processed by single-supply operational amplifiers.
Expected outcome:
* The input AC waveform (V_in_waveform) will remain a standard sine wave centered at 0 V.
* The output AC waveform (V_out_waveform) will have the same peak-to-peak amplitude but will be shifted above 0 V.
* A measurable DC_offset will be established at the output, roughly equal to the peak input voltage minus the diode’s forward voltage drop.
Target audience and level: Intermediate electronics students learning wave shaping and non-linear circuits.
Materials
- V1: 5 V peak (10 Vpp) 1 kHz AC sine wave source, function: input signal
- C1: 1 µF capacitor, function: AC coupling and DC offset storage
- D1: 1N4148 small-signal diode, function: clamps the minimum voltage level
- R1: 100 kΩ resistor, function: provides a discharge path and defines the load
Wiring guide
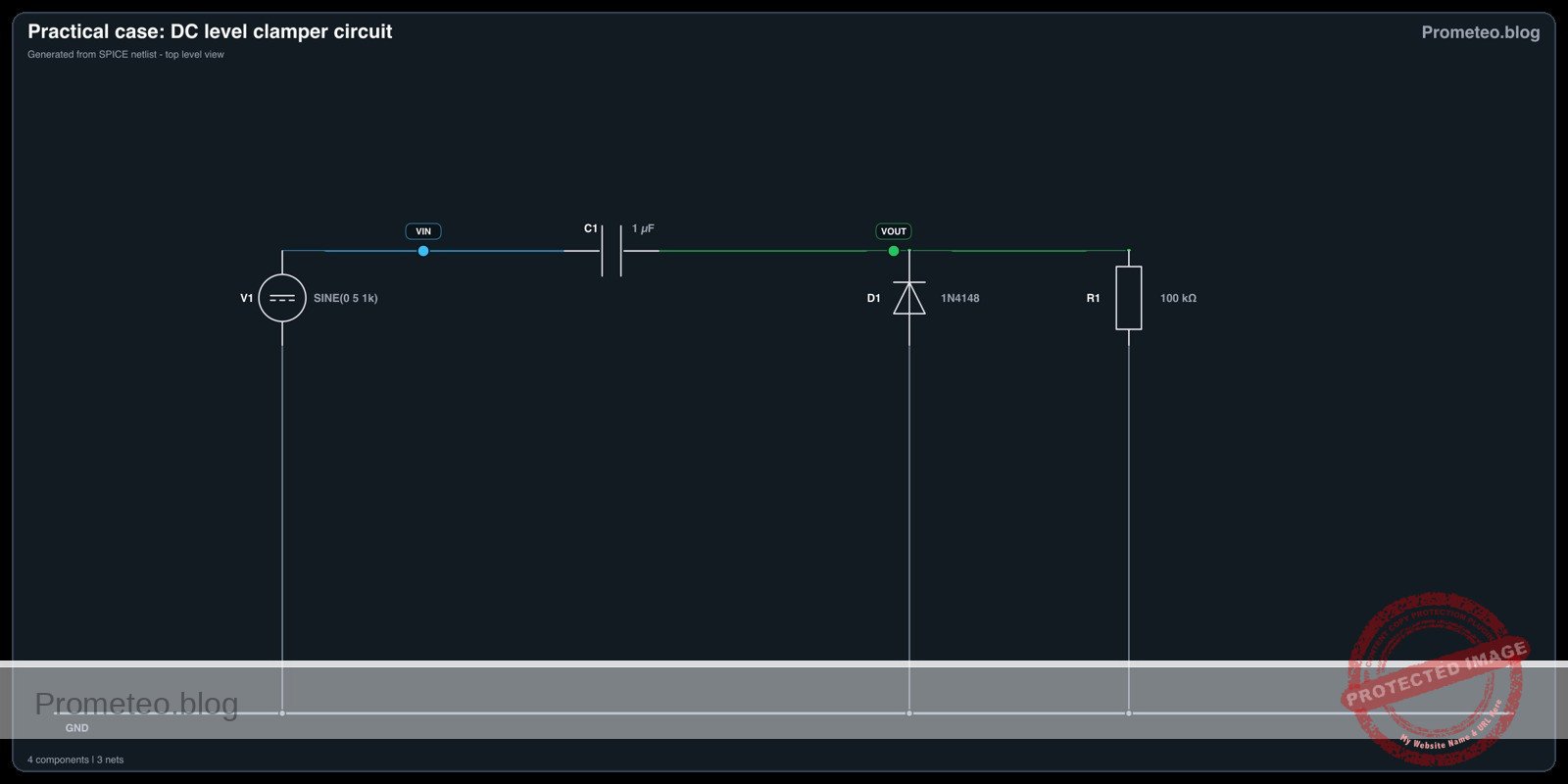
- V1: connects between node VIN (positive) and node 0 (GND).
- C1: connects between node VIN and node VOUT.
- D1: connects between node 0 (anode) and node VOUT (cathode).
- R1: connects between node VOUT and node 0 (GND).
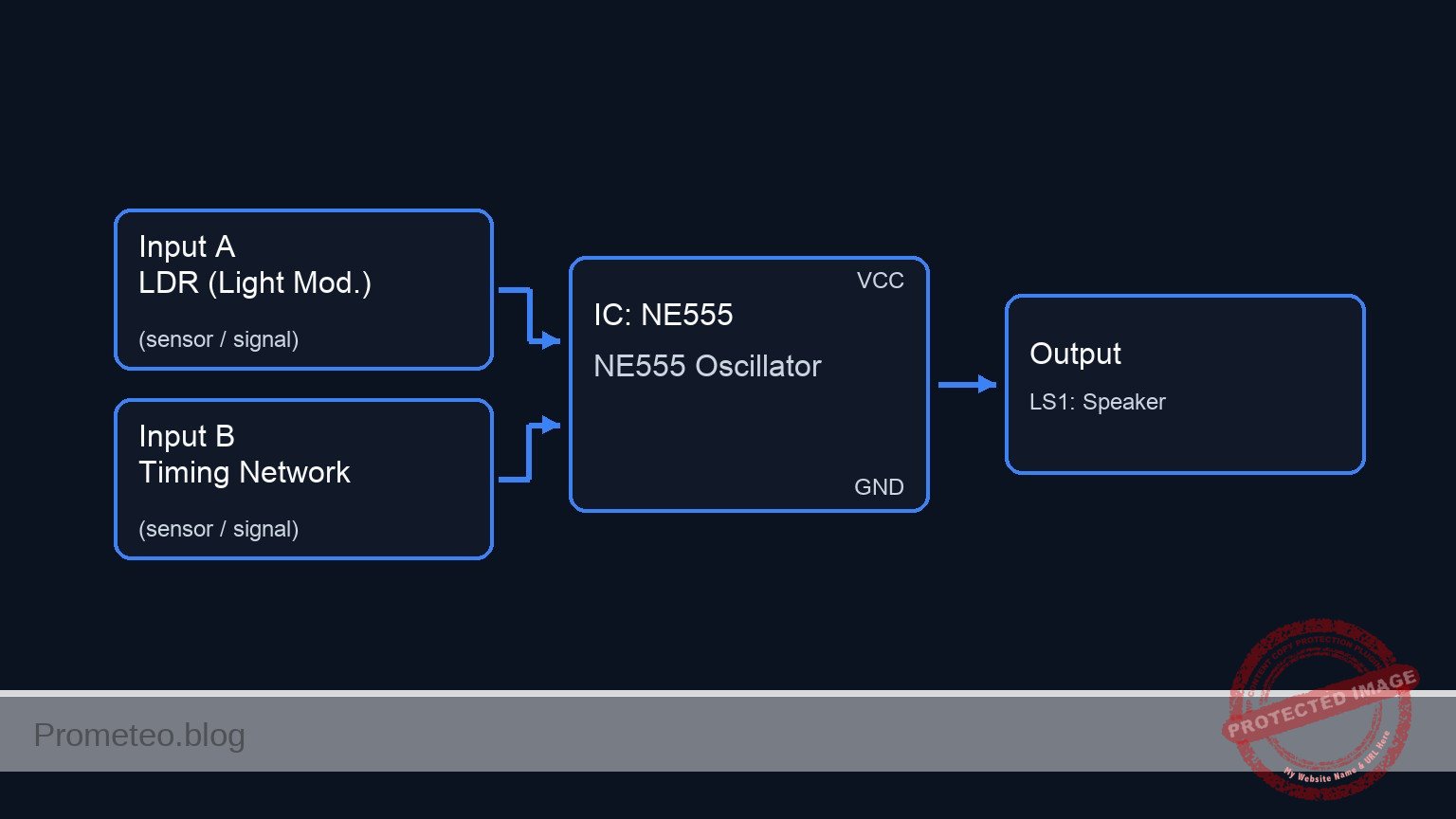
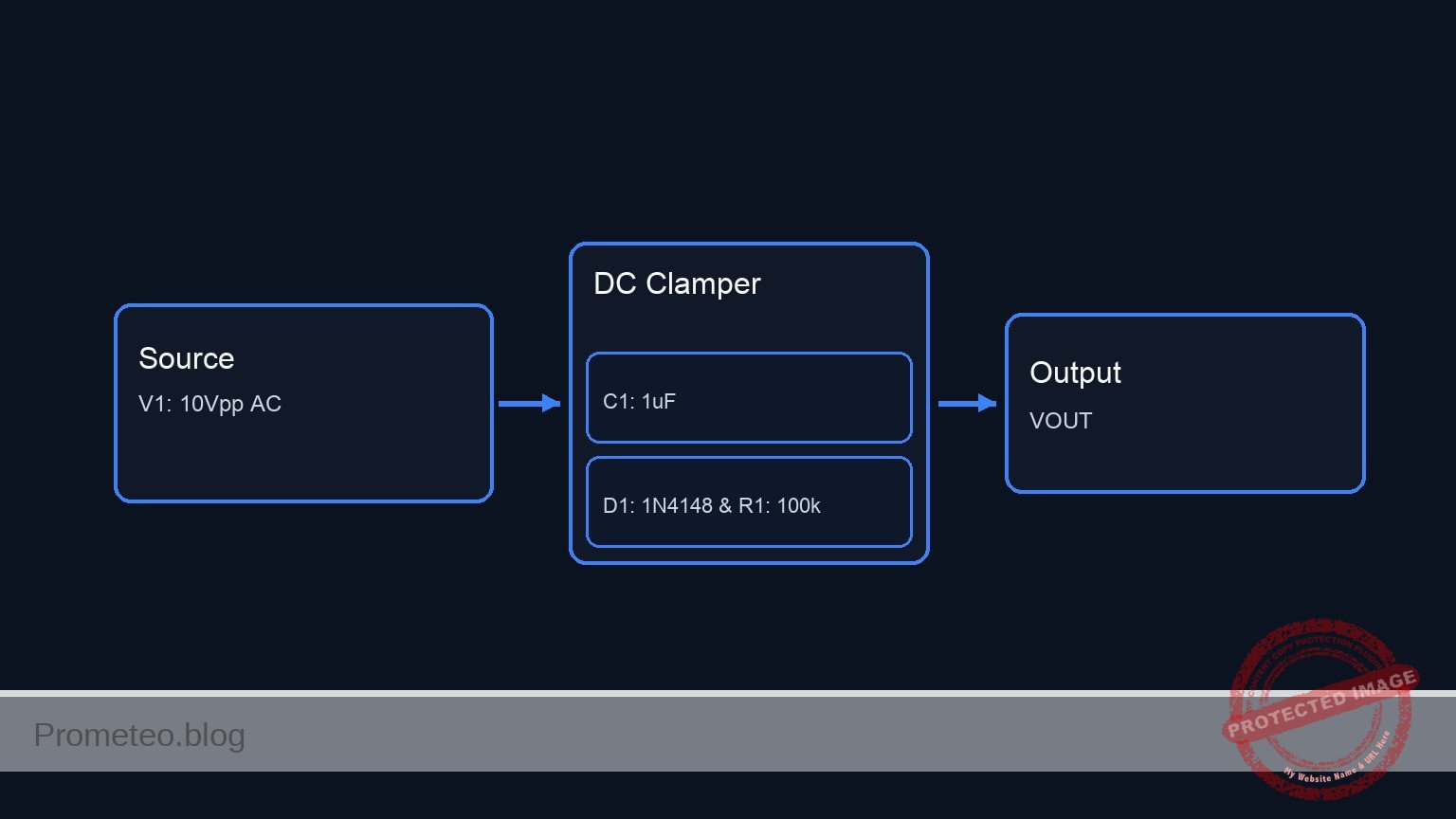
Conceptual block diagram
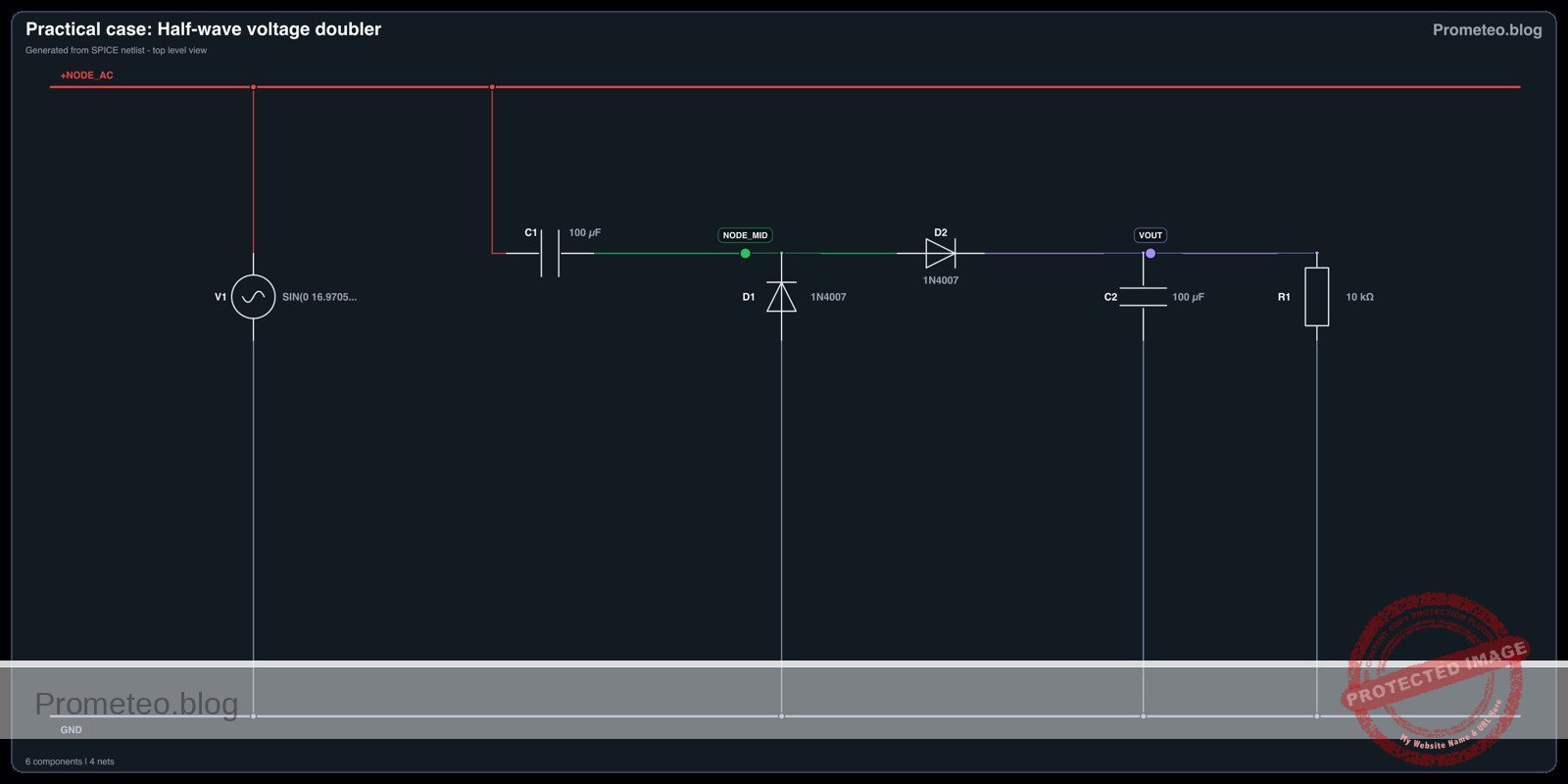
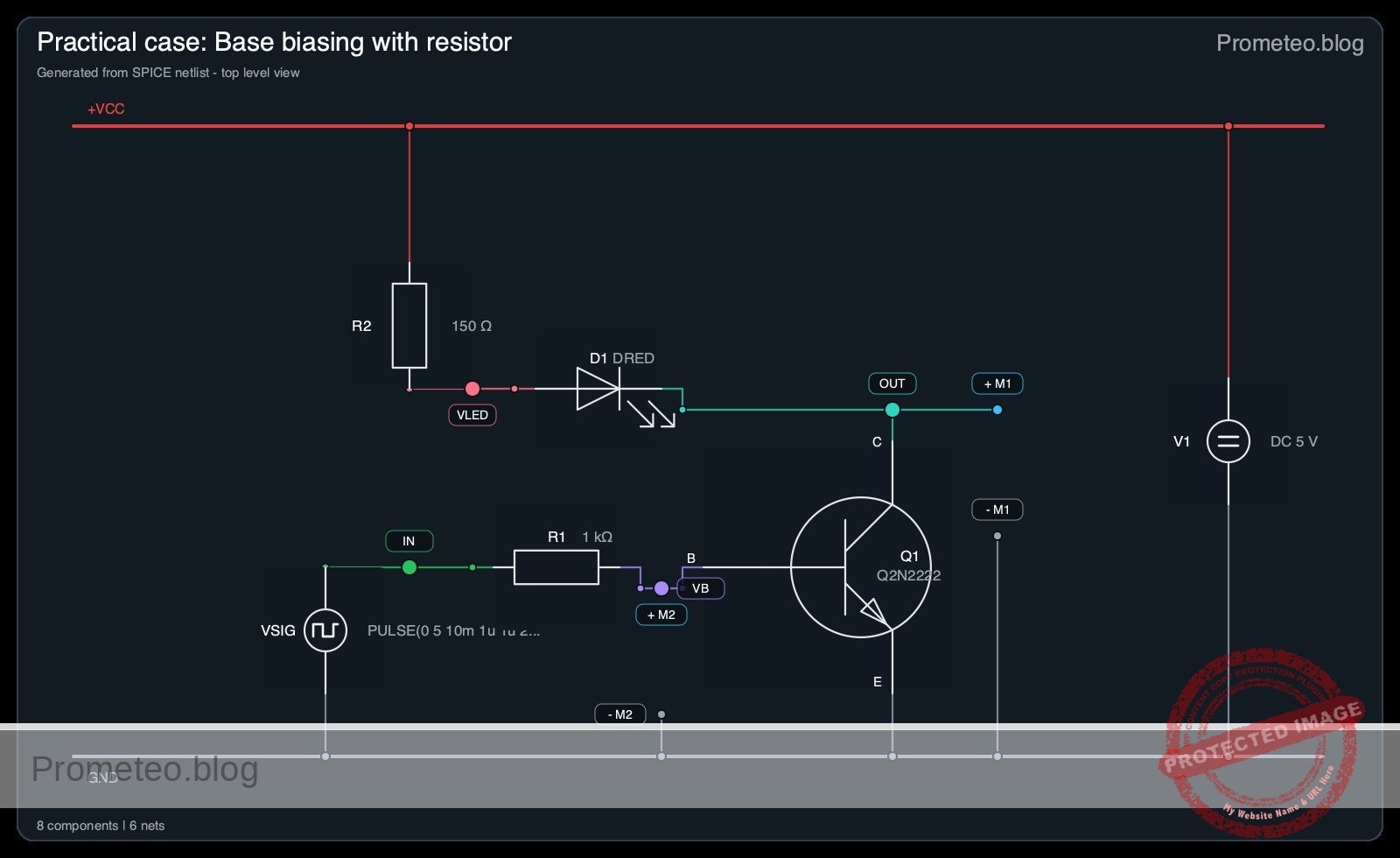
Schematic
[ V1: 10Vpp AC ] --(VIN)--> [ C1: 1µF ] --(VOUT)--+--> [ R1: 100 kΩ ] --> GND
|
+--> [ D1: 1N4148 Cathode ] --(Anode)--> GND
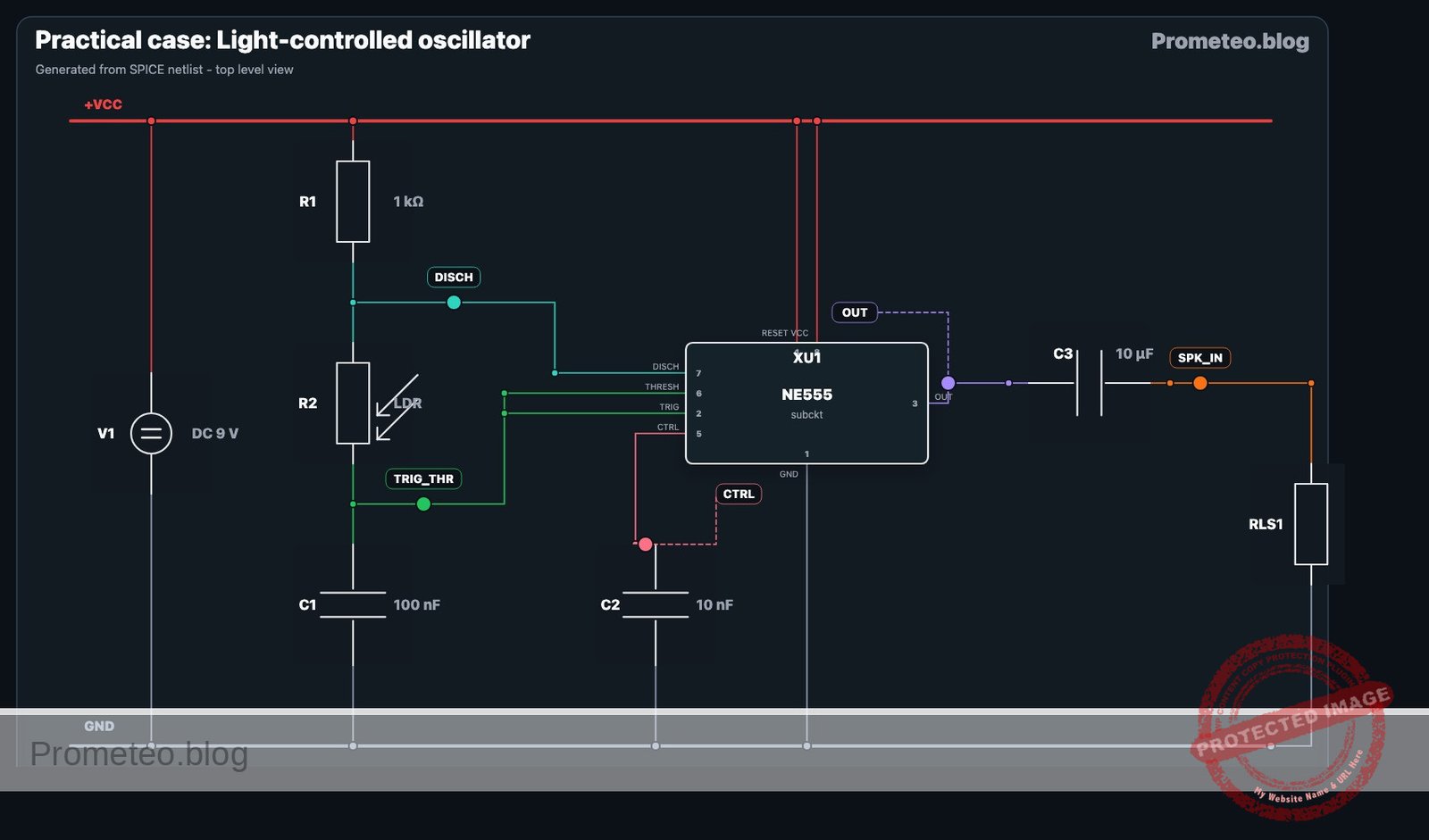
Electrical diagram
Measurements and tests
- Signal Generation: Connect your function generator or AC source to provide a 10 Vpp sine wave at 1 kHz to node VIN.
- Input Verification: Probe node VIN with an oscilloscope channel (DC coupled). Verify the V_in_waveform swings symmetrically from -5 V to +5 V.
- Output Waveform: Probe node VOUT with a second oscilloscope channel (DC coupled). Observe the V_out_waveform. It should swing approximately from -0.7 V to +9.3 V.
- DC Offset Measurement: Switch your digital multimeter (DMM) to DC Voltage mode and measure node VOUT relative to node 0. You should read a positive DC_offset of approximately +4.3 V.
- Time Constant Check: Note how the output waveform maintains its shape. The high value of R1 ensures the capacitor does not discharge significantly between cycles.
SPICE netlist and simulation
Reference SPICE Netlist (ngspice)
* Practical case: DC level clamper circuit
.width out=256
* Input Signal: 5V peak (10Vpp), 1kHz sine wave
V1 VIN 0 SINE(0 5 1k)
* AC coupling and DC offset storage capacitor
C1 VIN VOUT 1u
* Clamping diode (Anode to GND, Cathode to VOUT)
D1 0 VOUT 1N4148
* Load resistor and discharge path
R1 VOUT 0 100k
* Standard 1N4148 diode model
.model 1N4148 D(IS=4.35E-9 N=1.906 BV=110 IBV=0.0001 RS=0.6458 CJO=1.20E-11 M=0.3333 VJ=0.75 TT=3.48E-9)
* Transient analysis for 5 milliseconds to capture 5 full cycles of the 1kHz signal
.tran 10u 5m
* Output directives (Input and Output nodes first)
.print tran V(VIN) V(VOUT)
.op
.endCopy this content into a .cir file and run with ngspice.
Simulation Results (Transient Analysis)

Show raw data table (509 rows)
Index time v(vin) v(vout) 0 0.000000e+00 0.000000e+00 -2.62072e-15 1 1.000000e-07 3.141592e-03 3.141552e-03 2 1.768596e-07 5.556208e-03 5.556134e-03 3 3.305789e-07 1.038543e-02 1.038529e-02 4 6.380174e-07 2.004385e-02 2.004355e-02 5 1.252894e-06 3.936043e-02 3.935972e-02 6 2.482649e-06 7.799154e-02 7.798965e-02 7 4.942157e-06 1.552375e-01 1.552318e-01 8 9.861173e-06 3.095997e-01 3.095809e-01 9 1.969921e-05 6.172898e-01 6.172223e-01 10 2.969921e-05 9.276226e-01 9.274748e-01 11 3.969921e-05 1.234294e+00 1.234036e+00 12 4.969921e-05 1.536095e+00 1.535695e+00 13 5.969921e-05 1.831833e+00 1.831263e+00 14 6.969921e-05 2.120342e+00 2.119572e+00 15 7.969921e-05 2.400483e+00 2.399485e+00 16 8.969921e-05 2.671151e+00 2.669897e+00 17 9.969921e-05 2.931276e+00 2.929740e+00 18 1.096992e-04 3.179833e+00 3.177990e+00 19 1.196992e-04 3.415841e+00 3.413667e+00 20 1.296992e-04 3.638368e+00 3.635840e+00 21 1.396992e-04 3.846536e+00 3.843632e+00 22 1.496992e-04 4.039523e+00 4.036224e+00 23 1.596992e-04 4.216569e+00 4.212856e+00 ... (485 more rows) ...
Reference SPICE netlist (ngspice)
* Practical case: DC level clamper circuit
.width out=256
* Input Signal: 5V peak (10Vpp), 1kHz sine wave
V1 VIN 0 SINE(0 5 1k)
* AC coupling and DC offset storage capacitor
C1 VIN VOUT 1u
* Clamping diode (Anode to GND, Cathode to VOUT)
D1 0 VOUT 1N4148
* Load resistor and discharge path
R1 VOUT 0 100k
* Standard 1N4148 diode model
.model 1N4148 D(IS=4.35E-9 N=1.906 BV=110 IBV=0.0001 RS=0.6458 CJO=1.20E-11 M=0.3333 VJ=0.75 TT=3.48E-9)
* Transient analysis for 5 milliseconds to capture 5 full cycles of the 1kHz signal
.tran 10u 5m
* Output directives (Input and Output nodes first)
.print tran V(VIN) V(VOUT)
.op
.endSimulation Results (Transient Analysis)
Common mistakes and how to avoid them
- Reversing the diode polarity: Placing the diode with the cathode to GND will create a negative clamper instead of a positive one. Always double-check the black band (cathode) orientation on the physical diode.
- Using too small of a load resistor (R1): If R1 is too small, the RC time constant will be shorter than the signal’s period, causing the capacitor to discharge too quickly and distorting the output waveform into a «shark fin» shape.
- Using a polarized capacitor incorrectly: If you use an electrolytic capacitor for C1, the positive leg must face the side with the higher average DC voltage (in this positive clamper case, facing node VOUT).
Troubleshooting
- Symptom: The output waveform is identical to the input waveform (centered at 0 V).
- Cause: The diode D1 is open, disconnected, or the capacitor C1 is shorted.
- Fix: Check diode continuity with a multimeter and ensure the capacitor is wired in series with the signal.
- Symptom: The output waveform is flat at 0 V or -0.7 V.
- Cause: The diode D1 is shorted to ground, or VOUT is accidentally tied directly to GND.
- Fix: Inspect the breadboard wiring at node VOUT and replace the diode if it fails a diode-mode test.
- Symptom: The DC level is correct, but the waveform has severe droop or tilt on the flat edges.
- Cause: The RC time constant is too low for the 1 kHz frequency.
- Fix: Increase the value of R1 (e.g., from 10 kΩ to 100 kΩ) or increase C1 to prevent premature discharge.
Possible improvements and extensions
- Biased Clamper: Add a small DC voltage source (e.g., a 1.5 V battery) in series with the diode D1 (between the anode and GND) to clamp the signal to an arbitrary reference level other than -0.7 V.
- Negative Clamper Conversion: Reverse the direction of D1 (anode to VOUT, cathode to 0) and observe how the entire AC waveform is shifted downward, sitting entirely below +0.7 V.
More Practical Cases on Prometeo.blog
Find this product and/or books on this topic on Amazon
As an Amazon Associate, I earn from qualifying purchases. If you buy through this link, you help keep this project running.
Quick Quiz

Telecommunications Electronics Engineer and Computer Engineer (official degrees in Spain).