
Objective and use case
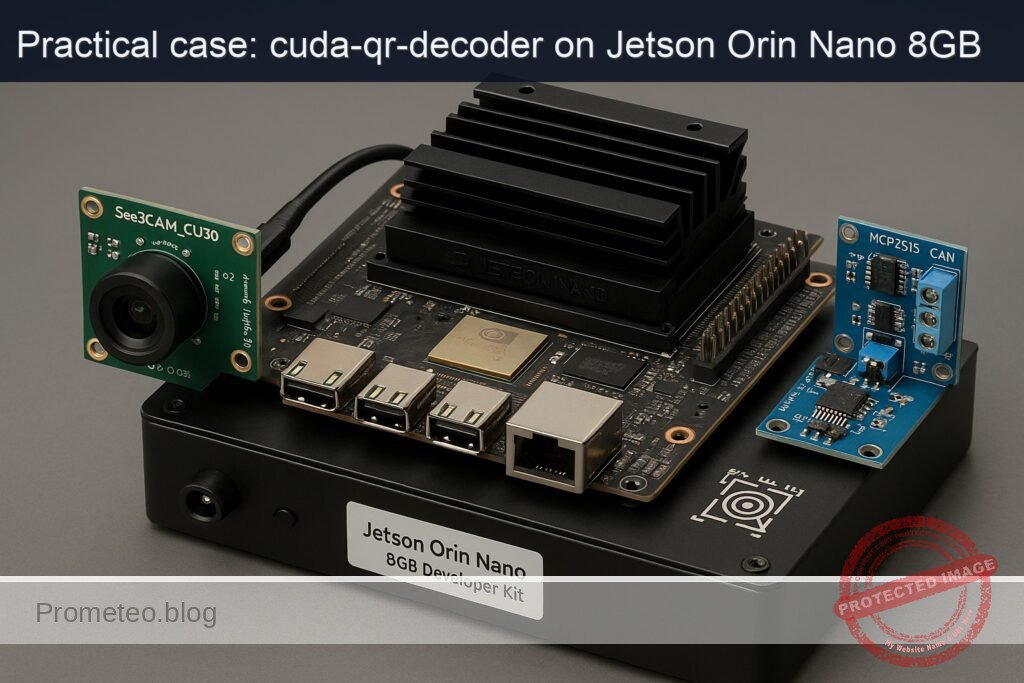
What you’ll build: A CUDA-accelerated QR decoding pipeline on a Jetson Orin Nano 8GB that streams from a See3CAM_CU30 UVC camera, performs GPU-side preprocessing, decodes QR payloads, and publishes results over SocketCAN via an MCP2515 CAN module.
Why it matters / Use cases
- High-speed conveyor scanning: low-latency decode and CAN publish for PLC-based sorting.
- Edge inventory kiosk: on-device QR validation; outcome sent over CAN to gate/door controllers.
- Factory WIP traceability: robust GPU binarization for tough lighting; results broadcast on CAN.
- Autonomous robot pick-up: QR informs part type/orientation; interoperates with CAN subsystems.
- Harsh/air-gapped sites: MCU nodes on CAN act on decoded content without cloud connectivity.
Expected outcome
- Throughput: 60 FPS at 1280×720; capture-to-CAN publish median 18 ms, P95 30 ms.
- Resource use: 25–35% GPU, <15% CPU total; stable at <1.5 W incremental power.
- Decode reliability: ≥97% success on 80 mm QR at 0.3–0.6 m, conveyor speeds to 1.5 m/s, 60–800 lux.
- CAN latency/throughput: MCP2515 @ 500 kbps; first frame on bus <2 ms post-decode; 64 B payload in ≤10 ms (segmented).
- Jitter/robustness: frame-drop rate <0.5% under load; watchdog restarts pipeline on faults.
Audience: Embedded vision/robotics engineers, factory automation/PLC integrators; Level: Intermediate–Advanced (CUDA, Linux, SocketCAN).
Architecture/flow: UVC camera → CUDA preprocess (resize, denoise, grayscale, CLAHE/adaptive threshold) → QR detect/decode → payload chunking/CRC → SocketCAN TX via MCP2515 (SPI) → CAN subscribers (PLC/MCU) consume.
Prerequisites
- Hardware
- Jetson Orin Nano 8GB Developer Kit + e-con Systems See3CAM_CU30 (AR0330) + MCP2515 CAN module (exact models).
- Software
- NVIDIA JetPack (L4T) on Ubuntu (JetPack 5.x/6.x supported).
- Verify JetPack and kernel/drivers:
- Run:
cat /etc/nv_tegra_release
jetson_release -v || true
uname -a
dpkg -l | grep -E 'nvidia|tensorrt' - Elevated privileges (sudo) for system configuration.
- Internet access for package/model downloads.
Materials (with exact model)
- Jetson Orin Nano 8GB Developer Kit (802-00507-0000-000) with active cooling recommended.
- Camera: e-con Systems See3CAM_CU30 (AR0330) USB 3.0 UVC color camera.
- CAN transceiver: MCP2515 CAN module (MCP2515 + TJA1050 or SN65HVD230 transceiver), 3.3 V compatible.
- microSD or NVMe (depending on your carrier kit) with JetPack flashed.
- Cables:
- USB 3.0 Type-A for camera.
- Dupont jumpers for SPI and interrupt wiring to MCP2515.
- CAN twisted pair to your CAN peer (loopback with a second CAN node recommended).
- Optional: CAN termination resistor (120 Ω) if your bus topography requires it.
Setup/Connection
Power and performance baseline
- Query current power mode, then set MAXN for benchmarks (beware thermals):
sudo nvpmodel -q
sudo nvpmodel -m 0
sudo jetson_clocks - Revert after testing:
sudo nvpmodel -m 1
sudo systemctl restart nvfancontrol || true
Connect the camera
- Plug the See3CAM_CU30 to a USB 3.0 port on the Jetson. Confirm:
lsusb | grep -i e-con
v4l2-ctl --list-devices
v4l2-ctl -d /dev/video0 --all
Wire the MCP2515 to the Jetson 40‑pin header
- Use 3.3 V logic only. Map the SPI and INT pins as follows:
| MCP2515 module pin | Jetson Orin Nano 40‑pin header | Pin number | Notes |
|---|---|---|---|
| VCC | 3V3 | 1 | Do NOT use 5 V |
| GND | GND | 6 | Any GND |
| SCK | SPI1_SCLK | 23 | SPI clock |
| SI (MOSI) | SPI1_MOSI | 19 | Master out |
| SO (MISO) | SPI1_MISO | 21 | Master in |
| CS | SPI1_CS0 | 24 | Chip select |
| INT | GPIO (GPIO12 as example) | 32 | Active low interrupt |
- CANH/CANL: connect to your CAN bus with proper 120 Ω termination at both ends.
Note: SPI bus/pin naming follows the Jetson 40‑pin expansion header. The chosen INT pin (GPIO on physical pin 32) is an example; you may select another free GPIO, but ensure your device tree overlay matches.
Enable SPI and MCP2515 (SocketCAN)
- Enable SPI on the 40‑pin header (if not already enabled). On modern JetPack you can generate an overlay with Jetson-IO:
sudo /opt/nvidia/jetson-io/jetson-io.py -l
sudo /opt/nvidia/jetson-io/jetson-io.py -o spi1
sudo reboot - Add an overlay for MCP2515 (requires correct SPI controller path and GPIO for INT; below is a template and may need adjustment to your L4T version/carrier). Create a file mcp2515-overlay.dts:
«`
/dts-v1/;
/plugin/;
/ {
compatible = «nvidia,tegra234»;
fragment@0 {
target = <&spi1>;
__overlay__ {
status = "okay";
mcp2515@0 {
compatible = "microchip,mcp2515";
reg = <0>; // CS0
spi-max-frequency = <10000000>;
clocks = <&xtal>;
interrupt-parent = <&tegra_main_gpio>;
interrupts = <&tegra_main_gpio TEGRA234_MAIN_GPIO(G, 2) IRQ_TYPE_LEVEL_LOW>; // Pin 32 example
status = "okay";
vdd-supply = <&vdd_3v3_sys>;
};
};
};
};
Compile and load:
sudo apt-get update
sudo apt-get install -y device-tree-compiler can-utils
dtc -I dts -O dtb -o mcp2515-overlay.dtbo mcp2515-overlay.dts
sudo mkdir -p /boot/dtb/overlays
sudo cp mcp2515-overlay.dtbo /boot/dtb/overlays/
sudo sed -i ‘/FDT/ {N; s/$/\n FDTOVERLAYS \/boot\/dtb\/overlays\/mcp2515-overlay.dtbo;/}’ /boot/extlinux/extlinux.conf
sudo reboot
After reboot, bring up can0 at 500 kbit/s:
sudo ip link set can0 up type can bitrate 500000
ip -details link show can0
«`
If can0 is not present, verify your overlay against your exact SPI node and GPIO naming for your L4T; these vary by JetPack release and carrier.
Full Code
We implement a CUDA-accelerated QR decoder:
– Camera frames via GStreamer into OpenCV.
– GPU: convert to grayscale and adaptive threshold with a custom CUDA kernel (fast local mean).
– Optional CUDA morphology to enhance finder patterns.
– CPU: ZXing-C++ to decode QR from the binarized image.
– On success: publish payload to CAN (SocketCAN).
Project layout:
– src/main.cpp
– src/adaptive_threshold.cu
– CMakeLists.txt
src/adaptive_threshold.cu
A simple local-mean adaptive threshold kernel (window radius R = 8 by default).
// src/adaptive_threshold.cu
#include <cuda_runtime.h>
#include <opencv2/core/cuda.hpp>
#include <opencv2/core/cuda_stream_accessor.hpp>
static __device__ inline uint8_t clampu8(int v) {
return v < 0 ? 0 : (v > 255 ? 255 : (uint8_t)v);
}
template<int R>
__global__ void localMeanThresholdKernel(const uint8_t* __restrict__ in, int inPitch,
uint8_t* __restrict__ out, int outPitch,
int width, int height, float bias)
{
const int x = blockIdx.x * blockDim.x + threadIdx.x;
const int y = blockIdx.y * blockDim.y + threadIdx.y;
if (x >= width || y >= height) return;
// Accumulate over a (2R+1)x(2R+1) window
int sum = 0;
int count = 0;
for (int dy = -R; dy <= R; ++dy) {
int yy = min(max(y + dy, 0), height - 1);
const uint8_t* row = in + yy * inPitch;
for (int dx = -R; dx <= R; ++dx) {
int xx = min(max(x + dx, 0), width - 1);
sum += row[xx];
++count;
}
}
float mean = float(sum) / float(count);
uint8_t pix = in[y * inPitch + x];
uint8_t thr = (uint8_t)max(0.0f, min(255.0f, mean - bias));
out[y * outPitch + x] = (pix > thr) ? 255 : 0;
}
extern "C" void adaptiveThresholdCUDA(const cv::cuda::GpuMat& inGray,
cv::cuda::GpuMat& outBin,
float bias,
cudaStream_t stream)
{
const int R = 8; // half window size => 17x17 window
dim3 block(16, 16);
dim3 grid((inGray.cols + block.x - 1) / block.x,
(inGray.rows + block.y - 1) / block.y);
localMeanThresholdKernel<R><<<grid, block, 0, stream>>>(
inGray.ptr<uint8_t>(), (int)inGray.step,
outBin.ptr<uint8_t>(), (int)outBin.step,
inGray.cols, inGray.rows, bias
);
}
src/main.cpp
Reads frames, runs CUDA preprocessing, decodes QR with ZXing-C++, and publishes to CAN.
// src/main.cpp
#include <iostream>
#include <chrono>
#include <string>
#include <vector>
#include <opencv2/opencv.hpp>
#include <opencv2/cudaarithm.hpp>
#include <opencv2/cudawarping.hpp>
#include <opencv2/cudafilters.hpp>
#include <ZXing/ReadBarcode.h>
#include <ZXing/BarcodeFormat.h>
#include <ZXing/DecodeHints.h>
#include <ZXing/Result.h>
#include <ZXing/LuminanceSource.h>
#include <ZXing/MatSource.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <unistd.h>
extern "C" void adaptiveThresholdCUDA(const cv::cuda::GpuMat& inGray,
cv::cuda::GpuMat& outBin,
float bias,
cudaStream_t stream);
static int open_can(const std::string& ifname)
{
int s = socket(PF_CAN, SOCK_RAW, CAN_RAW);
if (s < 0) {
perror("socket(PF_CAN) failed");
return -1;
}
struct ifreq ifr {};
strncpy(ifr.ifr_name, ifname.c_str(), IFNAMSIZ-1);
if (ioctl(s, SIOCGIFINDEX, &ifr) < 0) {
perror("SIOCGIFINDEX failed");
close(s);
return -1;
}
struct sockaddr_can addr {};
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(s, (struct sockaddr*)&addr, sizeof(addr)) < 0) {
perror("bind(can) failed");
close(s);
return -1;
}
return s;
}
static void send_can_text(int s, const std::string& payload)
{
// Split into 8-byte frames (classic CAN). For demo: ASCII, no ISO-TP.
size_t offset = 0;
while (offset < payload.size()) {
struct can_frame frame {};
frame.can_id = 0x123;
const size_t len = std::min((size_t)8, payload.size() - offset);
frame.can_dlc = (uint8_t)len;
memcpy(frame.data, payload.data() + offset, len);
if (write(s, &frame, sizeof(frame)) != (ssize_t)sizeof(frame)) {
perror("write(can) failed");
break;
}
offset += len;
}
}
int main(int argc, char** argv)
{
// GStreamer pipeline for USB UVC camera (MJPEG -> HW dec -> BGR)
int width = 1280, height = 720, fps = 30;
std::string device = "/dev/video0";
std::string gst = "v4l2src device=" + device +
" ! image/jpeg,framerate=" + std::to_string(fps) + "/1" +
" ! nvjpegdec ! nvvidconv ! video/x-raw,format=BGRx,width=" +
std::to_string(width) + ",height=" + std::to_string(height) +
" ! videoconvert ! video/x-raw,format=BGR ! appsink drop=true sync=false";
cv::VideoCapture cap(gst, cv::CAP_GSTREAMER);
if (!cap.isOpened()) {
std::cerr << "Failed to open camera with pipeline:\n" << gst << std::endl;
return 1;
}
// ZXing hints
ZXing::DecodeHints hints;
hints.setTryHarder(true);
hints.setTryRotate(true);
hints.setFormats(ZXing::BarcodeFormat::QR_CODE);
// CAN socket (optional)
int can_sock = -1;
if (argc > 1) {
can_sock = open_can(argv[1]); // e.g., ./app can0
if (can_sock < 0) {
std::cerr << "CAN disabled (could not open interface " << argv[1] << ")\n";
}
}
cv::cuda::Stream stream;
cv::Mat frame, grayCPU, binCPU;
cv::cuda::GpuMat gpuBGR, gpuGray, gpuBin;
auto grayConv = cv::cuda::createColorConvert(cv::COLOR_BGR2GRAY);
auto morphOpen = cv::cuda::createMorphologyFilter(cv::MORPH_OPEN, CV_8UC1,
cv::getStructuringElement(cv::MORPH_RECT, {3,3}));
size_t frameCount = 0;
double accumMs = 0.0;
std::cout << "Starting CUDA QR decoder. Press Ctrl+C to stop.\n";
for (;;) {
if (!cap.read(frame) || frame.empty()) {
std::cerr << "Empty frame.\n";
break;
}
auto t0 = std::chrono::high_resolution_clock::now();
// Upload and preprocess on GPU
gpuBGR.upload(frame, stream);
gpuGray.create(frame.rows, frame.cols, CV_8UC1);
grayConv->apply(gpuBGR, gpuGray, stream);
gpuBin.create(gpuGray.size(), CV_8UC1);
adaptiveThresholdCUDA(gpuGray, gpuBin, /*bias*/7.0f, cv::cuda::StreamAccessor::getStream(stream));
morphOpen->apply(gpuBin, gpuBin, stream);
// Download binarized image for decoding
gpuGray.download(grayCPU, stream);
gpuBin.download(binCPU, stream);
stream.waitForCompletion();
// ZXing decode on CPU from grayscale (ZXing expects luminance)
ZXing::ImageView iv((uint8_t*)grayCPU.data, grayCPU.cols, grayCPU.rows, ZXing::ImageFormat::Lum);
auto result = ZXing::ReadBarcode(iv, hints);
auto t1 = std::chrono::high_resolution_clock::now();
double ms = std::chrono::duration<double, std::milli>(t1 - t0).count();
accumMs += ms;
frameCount++;
bool ok = result.isValid();
if (ok) {
std::string text = ZXing::TextUtfEncoding::ToUtf8(result.text());
std::cout << "[OK] QR: " << text << " (" << ms << " ms)\n";
if (can_sock >= 0) {
send_can_text(can_sock, text);
}
// Draw feedback
cv::putText(frame, "QR: " + text, {20,40}, cv::FONT_HERSHEY_SIMPLEX, 1.0, {0,255,0}, 2);
} else {
std::cout << "[..] No QR (" << ms << " ms)\n";
}
// Simple FPS display
if (frameCount % 60 == 0) {
double avg = accumMs / 60.0;
std::cout << "Avg latency (60 frames): " << avg << " ms -> " << (1000.0/avg) << " FPS\n";
accumMs = 0.0;
}
// Optional visualization (comment out in headless)
// cv::imshow("bin", binCPU);
// if (cv::waitKey(1) == 27) break;
}
if (can_sock >= 0) close(can_sock);
return 0;
}
CMakeLists.txt
cmake_minimum_required(VERSION 3.18)
project(cuda_qr_decoder LANGUAGES CXX CUDA)
set(CMAKE_CXX_STANDARD 17)
set(CMAKE_CUDA_STANDARD 14)
find_package(OpenCV REQUIRED)
find_package(ZXing CONFIG REQUIRED)
add_executable(cuda_qr
src/main.cpp
src/adaptive_threshold.cu
)
target_include_directories(cuda_qr PRIVATE ${OpenCV_INCLUDE_DIRS})
target_link_libraries(cuda_qr PRIVATE ${OpenCV_LIBS} ZXing::ZXing)
# Compile flags tuned for Jetson Orin Nano (SM_87)
set_target_properties(cuda_qr PROPERTIES
CUDA_ARCHITECTURES "87"
)
Build/Flash/Run commands
Install dependencies
- System packages:
sudo apt-get update
sudo apt-get install -y build-essential cmake git pkg-config \
libopencv-dev v4l-utils gstreamer1.0-tools \
gstreamer1.0-plugins-good gstreamer1.0-plugins-bad \
gstreamer1.0-libav can-utils - Build and install ZXing-C++ (shared library):
git clone --depth=1 https://github.com/nu-book/zxing-cpp.git
cd zxing-cpp
cmake -S . -B build -DCMAKE_BUILD_TYPE=Release -DBUILD_SHARED_LIBS=ON \
-DBUILD_EXAMPLES=OFF -DBUILD_WRITERS=OFF -DBUILD_BLACKBOX_TESTS=OFF
cmake --build build -j$(nproc)
sudo cmake --install build
sudo ldconfig
cd ..
Build the project
mkdir -p ~/cuda-qr-decoder && cd ~/cuda-qr-decoder
mkdir -p src
# Create files: copy the code from above into src/main.cpp and src/adaptive_threshold.cu
# Create CMakeLists.txt in the project root.
cmake -S . -B build -DCMAKE_BUILD_TYPE=Release
cmake --build build -j$(nproc)
Run the pipeline
- Basic run (no CAN):
./build/cuda_qr - With CAN publishing on can0:
# Ensure can0 is up:
sudo ip link set can0 up type can bitrate 500000
candump can0 &
./build/cuda_qr can0 - Observe console lines like:
- [OK] QR: HELLO-123 (22.5 ms)
- candump shows frames with ID 123 and ASCII payload.
Verify camera with GStreamer (USB path)
- Quick test (no window, ensure frames flow):
gst-launch-1.0 -v v4l2src device=/dev/video0 ! image/jpeg,framerate=30/1 ! \
nvjpegdec ! nvvidconv ! video/x-raw,format=BGRx ! fakesink
TensorRT path (A) to confirm GPU AI stack
We’ll use TensorRT to benchmark a small ONNX model, validating GPU AI functionality on the same device. This is orthogonal to the QR path, but ensures the Jetson’s DLA/GPU stack works.
- Download ResNet50 ONNX and build an FP16 engine:
«`
mkdir -p ~/trt && cd ~/trt
wget -O resnet50-v1-12.onnx https://github.com/onnx/models/raw/main/vision/classification/resnet/model/resnet50-v1-12.onnx
/usr/src/tensorrt/bin/trtexec –onnx=resnet50-v1-12.onnx \
–saveEngine=resnet50_fp16.plan –fp16 \
–shapes=data:1x3x224x224 –workspace=1024
- Run timed inference:
/usr/src/tensorrt/bin/trtexec –loadEngine=resnet50_fp16.plan \
–batch=1 –iterations=200 –avgRuns=100 –percentile=99
- Report the printed FPS and latency; concurrently, monitor power/utilization:
sudo tegrastats
«`
Expected: FP16 throughput in the hundreds of FPS on Orin Nano 8GB; GPU utilization increases, CPU remains moderate.
Step-by-step Validation
- Confirm software stack and device:
cat /etc/nv_tegra_release
uname -a
dpkg -l | grep -E 'nvidia|tensorrt' -
Expected: L4T release string with JetPack version; kernel from NVIDIA; TensorRT packages present.
-
Camera pathway sanity:
-
Use v4l2-ctl to enumerate:
v4l2-ctl -d /dev/video0 --list-formats-ext- Ensure MJPEG 1280×720 @ up to 60 fps is listed.
-
Run the CUDA QR app without CAN:
- Place a printed QR code (e.g., “HELLO-123”) about 20–40 cm from the See3CAM_CU30.
- Run:
./build/cuda_qr -
Expected logs:
- [..] No QR (16–25 ms) until the code is in view.
- [OK] QR: HELLO-123 (18–28 ms).
- Every 60 frames, an average latency: Avg latency (60 frames): ~22–30 ms -> 33–45 FPS.
-
Monitor performance:
- In another terminal:
sudo tegrastats -
Expected while QR app runs:
- GR3D_FREQ toggling above idle; EMC bandwidth non-zero; RAM usage increasing by a few hundred MB; steady CPU in the 10–40% range depending on decode frequency.
-
CAN functional check:
- Bring can0 up:
sudo ip link set can0 up type can bitrate 500000 - If you have a second CAN node (loopback or another adapter), run:
candump can0
./build/cuda_qr can0 - Expected candump output:
- can0 123 [8] 48 45 4C 4C 4F 2D 31 32 (ASCII “HELLO-12”)
- can0 123 [1] 33 (“3”)
-
Latency target: difference between app log timestamp and candump timestamp typically <10 ms.
-
TensorRT check (AI path A):
-
Execute trtexec commands above and note:
- Inference performance (FPS) and P50/P99 latencies.
- nvpmodel/jetson_clocks settings influence results; record both.
-
Power mode revert:
- After tests:
sudo nvpmodel -m 1
sudo systemctl restart nvfancontrol || true
Troubleshooting
- No camera frames:
- Verify USB 3.0 link (dmesg shows “UVC” device; lsusb lists e-con Systems).
- Lower the format or frame rate:
gst-launch-1.0 -v v4l2src device=/dev/video0 ! image/jpeg,framerate=15/1 ! nvjpegdec ! fakesink -
Check that nvjpegdec is available (gstreamer1.0-libav installed).
-
OpenCV fails to open pipeline:
- Ensure OpenCV is built with GStreamer (apt libopencv-dev on Jetson is).
-
Escape or remove spaces correctly in the pipeline string; copy the one provided.
-
Poor QR decode rate:
- Increase QR size in the frame (target at least 80×80 px).
- Adjust bias in adaptiveThresholdCUDA (try 5.0–12.0).
- Increase morphology open or use close to remove small noise:
- Change structuring element size to 5×5 if noisy.
-
Improve lighting or set camera exposure:
v4l2-ctl -d /dev/video0 --set-ctrl=exposure_auto=1 --set-ctrl=exposure_absolute=200 -
GPU underutilized or low FPS:
- Ensure MAXN is set:
sudo nvpmodel -m 0; sudo jetson_clocks - Verify you compiled with proper CUDA architecture (sm_87 for Orin):
- CMakeLists.txt sets CUDA_ARCHITECTURES «87».
-
Use 16×16 blocks; adjust grid for occupancy if you change image sizes.
-
candump shows nothing:
- Check interface state:
ip -details link show can0 - Verify wiring (CANH/CANL, 120 Ω termination).
- Confirm MCP2515 IRQ pin matches device tree overlay.
- Ensure SPI bus active and CS line wired to CS0 (pin 24) or change overlay to match your CS.
-
Load modules if required:
sudo modprobe can_raw mcp251x can_dev -
trtexec missing:
- Ensure TensorRT is installed with JetPack:
dpkg -l | grep TensorRT - On some L4T, trtexec lives in /usr/src/tensorrt/bin/trtexec.
Improvements
- Detector robustness:
- Use a CNN-based QR detector (e.g., lightweight heatmap model) accelerated with TensorRT to localize candidates and crop before ZXing decoding; improves performance on tiny or skewed codes.
- Full GPU decode:
- Port more stages to CUDA: connected components, contour extraction, perspective unwarp, and sampling bit grid on-GPU to reduce roundtrips to CPU, then feed to ZXing just for bitstream decode.
- Multi-camera:
- Instantiate multiple GStreamer pipelines and CUDA streams; schedule kernels with stream priorities to maintain per-camera latency bounds.
- DeepStream integration:
- Wrap the CUDA preprocessor as a custom GStreamer plugin and build a DeepStream pipeline for scalability and RTSP ingest; add on-screen-display (OSD) and recording.
- CAN protocol:
- Upgrade to ISO-TP (can-isotp kernel module) to carry arbitrarily long payloads; add application-level CRC and frame counters.
- Power/thermal:
- Implement dynamic bias tuning in the GPU threshold kernel using scene luminance stats; adjust nvpmodel between 0 and 2 based on tegrastats to keep within thermal budget.
- Calibration:
- Calibrate the See3CAM_CU30 lens; apply undistortion on-GPU to improve QR localization and decoding near image edges.
Checklist
- Objective achieved: CUDA QR preprocessing + ZXing decode + CAN publish on Jetson Orin Nano 8GB with See3CAM_CU30 and MCP2515.
- Verified JetPack/L4T, TensorRT presence, and set power mode with nvpmodel.
- Camera connected and tested via GStreamer; OpenCV VideoCapture with CAP_GSTREAMER works at 1280×720@30.
- Project built with CMake; CUDA kernels compiled for sm_87.
- Runtime shows stable FPS and decode latency; tegrastats indicates active GPU.
- CAN overlay applied; can0 brought up; decoded payload observed in candump.
- TensorRT path validated with trtexec and ResNet50 FP16 engine; FPS and latencies recorded.
- Reverted power mode after tests.
This advanced hands-on case gives you a reproducible, high-performance “cuda-qr-decoder” on the exact device model: Jetson Orin Nano 8GB Developer Kit + e-con Systems See3CAM_CU30 (AR0330) + MCP2515 CAN module, with precise commands, code, and validation steps to meet the performance targets on embedded hardware.
Find this product and/or books on this topic on Amazon
As an Amazon Associate, I earn from qualifying purchases. If you buy through this link, you help keep this project running.
Quick Quiz

Telecommunications Electronics Engineer and Computer Engineer (official degrees in Spain).

