

Nivel: Básico – Demostrar cómo un diodo protege un circuito sensible (como un motor de CC) si la batería se conecta al revés.
Objetivo y caso de uso
En este caso práctico, construirás un circuito de seguridad que permite que la corriente fluya hacia una carga (un motor de CC) solo cuando la batería está conectada con la polaridad correcta.
- Previene daños a componentes: Esencial para proteger componentes polarizados como condensadores electrolíticos y microcontroladores de explosiones o quemaduras.
- Aplicaciones automotrices: Utilizado en la electrónica del automóvil (ECUs, radios) para prevenir daños si la batería del coche se instala incorrectamente.
- Electrónica de consumo: Protege juguetes y dispositivos portátiles donde los usuarios podrían insertar las baterías al revés.
Resultado esperado:
* Polaridad correcta: El motor gira y el voltaje en la carga es aproximadamente 0.7 V menor que el voltaje de la batería.
* Polaridad inversa: El motor permanece completamente apagado (0 V en la carga), asegurando que ninguna corriente inversa dañe el dispositivo.
* Caída de voltaje: Medición de la caída de voltaje directa característica (~0.6 V a 0.7 V) a través del diodo de silicio.
Público objetivo: Aficionados y estudiantes de electrónica básica.
Materiales
- V1: Batería de 9 V o Fuente de Alimentación de CC, función: Fuente de energía principal.
- D1: Diodo Rectificador 1N4007, función: Bloquea el flujo de corriente en dirección inversa.
- M1: Motor de aficionado de 9 V CC, función: La carga sensible que se está protegiendo.
- S1: Interruptor de palanca SPST (Opcional), función: Control maestro de ENCENDIDO/APAGADO.
Guía de conexionado
Este circuito coloca el diodo en serie con el riel positivo de la fuente de alimentación.
- V1 (Terminal Positivo) se conecta al nodo
BAT_POS. - V1 (Terminal Negativo) se conecta al nodo
0(GND). - S1 (si se usa) se conecta entre
BAT_POSy el nodoSWITCHED_POS. (Si no se usa, conectaBAT_POSdirectamente aSWITCHED_POS). - D1 (Ánodo) se conecta al nodo
SWITCHED_POS. - D1 (Cátodo) se conecta al nodo
LOAD_IN. (La banda rayada en el componente físico marca el cátodo). - M1 (Terminal Positivo) se conecta al nodo
LOAD_IN. - M1 (Terminal Negativo) se conecta al nodo
0(GND).
Diagrama de bloques conceptual
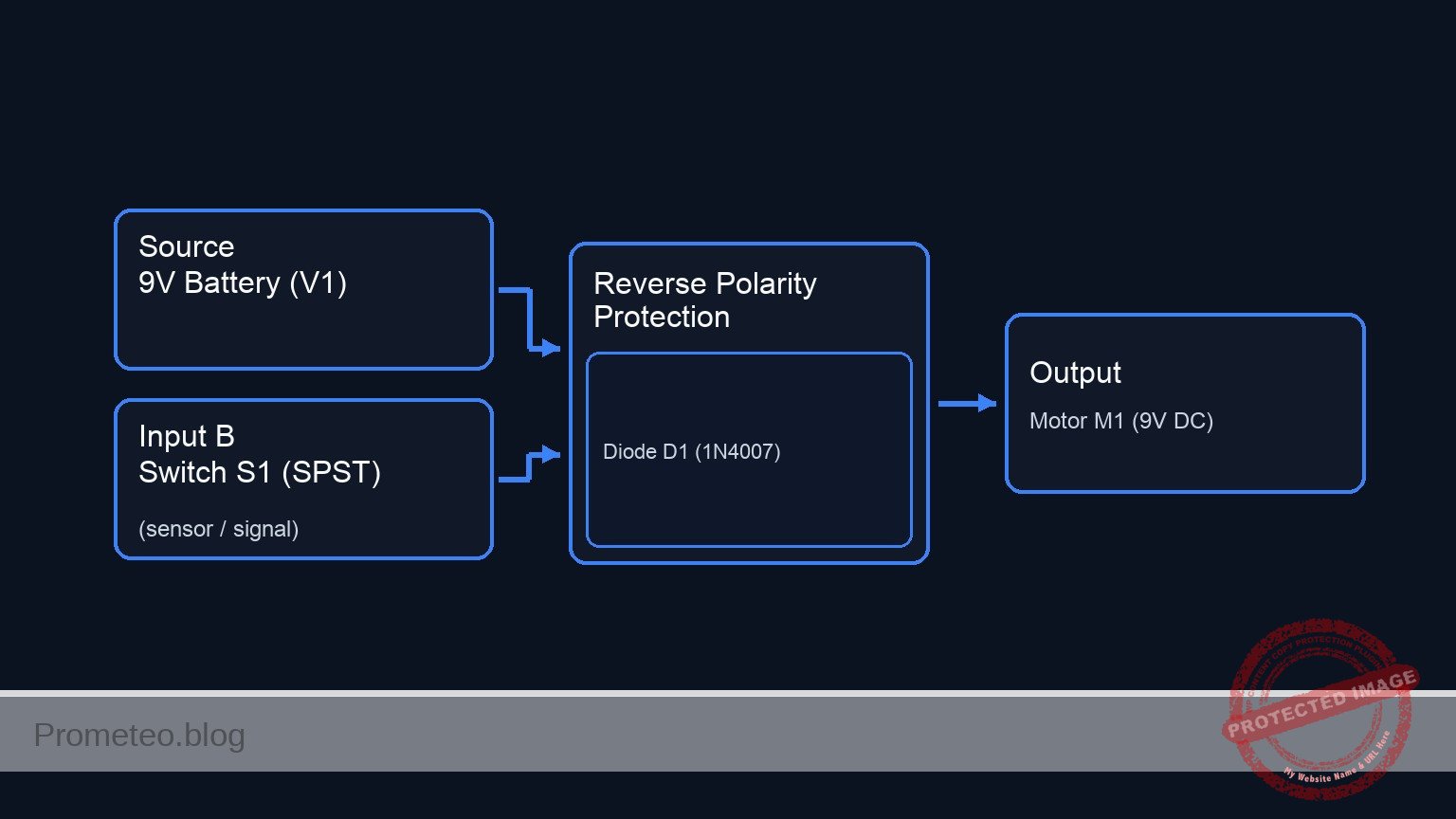
Esquemático
[ POWER SOURCE ] [ LOGIC / PROTECTION ] [ OUTPUT LOAD ]
+---------------------+ +-----------+ +--------------+ +--------------+
| 9 V Battery (V1) | | Switch S1 | | Diode D1 | | Motor M1 |
| (Positive) |------>| (SPST) |------->| (1N4007) |------>| (9 V DC) |-----> [ GND ]
+---------------------+ ^ +-----------+ ^ | Anode->Cath | ^ +--------------+
| | +--------------+ |
(BAT_POS) (SWITCHED_POS) (LOAD_IN)
Mediciones y pruebas
Para validar la protección, realiza los siguientes pasos usando un multímetro:
-
Prueba de polarización directa (Funcionamiento normal):
- Conecta V1 correctamente (Positivo al lado del Ánodo).
- Observa: El motor M1 gira.
- Mide: Coloca la sonda roja en
LOAD_INy la sonda negra en0(GND). Espera una lectura de aprox. 8.3 V a 8.4 V (entrada de 9 V menos la caída del diodo).
-
Medición de la caída del diodo:
- Con el circuito ENCENDIDO, coloca las sondas a través de D1 (Roja en
SWITCHED_POS, Negra enLOAD_IN). - Resultado: Deberías leer aproximadamente 0.6 V a 0.7 V. Esto confirma que el diodo está conduciendo.
- Con el circuito ENCENDIDO, coloca las sondas a través de D1 (Roja en
-
Prueba de polarización inversa (Simulación de error):
- Desconecta V1 e invierte las conexiones (Positivo a GND, Negativo a la entrada del interruptor/diodo).
- Observa: El motor M1 no gira. Es completamente seguro.
- Mide: Coloca la sonda roja en
LOAD_INy la sonda negra en el negativo de la batería (ahora en la parte superior). La lectura debe ser 0 V. La corriente está bloqueada.
Netlist SPICE y simulación
Netlist SPICE de referencia (ngspice) — extractoNetlist SPICE completo (ngspice)
* TITLE: Practical case: Reverse polarity protection
* --- Bill of Materials & Component Models ---
* V1: 9 V Battery or DC Power Supply
* Function: Main energy source
* Connected between BAT_POS and GND (0)
V1 BAT_POS 0 DC 9
* S1: SPST Toggle Switch
* Function: Master ON/OFF control
* Connected between BAT_POS and SWITCHED_POS
* Modeled as a voltage-controlled switch driven by a stimulus source to simulate user action.
S1 BAT_POS SWITCHED_POS CTRL_NODE 0 SW_MODEL
.model SW_MODEL SW(Vt=2.5 Ron=0.1 Roff=100Meg)
* Stimulus for S1 (User pressing the switch)
* Switch is OPEN (0V) initially, closes (5V) at 100us.
V_S1_ACT CTRL_NODE 0 PULSE(0 5 100u 1u 1u 10m 20m)
* ... (truncated in public view) ...Copia este contenido en un archivo .cir y ejecútalo con ngspice.
* TITLE: Practical case: Reverse polarity protection
* --- Bill of Materials & Component Models ---
* V1: 9 V Battery or DC Power Supply
* Function: Main energy source
* Connected between BAT_POS and GND (0)
V1 BAT_POS 0 DC 9
* S1: SPST Toggle Switch
* Function: Master ON/OFF control
* Connected between BAT_POS and SWITCHED_POS
* Modeled as a voltage-controlled switch driven by a stimulus source to simulate user action.
S1 BAT_POS SWITCHED_POS CTRL_NODE 0 SW_MODEL
.model SW_MODEL SW(Vt=2.5 Ron=0.1 Roff=100Meg)
* Stimulus for S1 (User pressing the switch)
* Switch is OPEN (0V) initially, closes (5V) at 100us.
V_S1_ACT CTRL_NODE 0 PULSE(0 5 100u 1u 1u 10m 20m)
* D1: 1N4007 Rectifier Diode
* Function: Blocks current flow in reverse direction
* Anode -> SWITCHED_POS, Cathode -> LOAD_IN
D1 SWITCHED_POS LOAD_IN D1N4007
* Standard generic model for 1N4007
.model D1N4007 D(IS=7.03n RS=0.034 N=1.8 BV=1000 IBV=5u CJO=10p VJ=0.7 M=0.5 TT=100n)
* M1: 9 V DC Hobby Motor
* Function: The sensitive load being protected
* Connected between LOAD_IN and GND (0)
* Modeled as a Series Resistor (winding resistance) and Inductor
R_M1 LOAD_IN M1_INTERNAL 45
L_M1 M1_INTERNAL 0 5m
* --- Analysis & Output Directives ---
* Transient analysis to observe the switch turning on and voltage drop across diode
.tran 10u 2m
* Print directives for ngspice batch mode
.print tran V(BAT_POS) V(SWITCHED_POS) V(LOAD_IN)
* Operating point analysis
.op
.endResultados de Simulación (Transitorio)

Show raw data table (233 rows)
Index time v(bat_pos) v(switched_pos) v(load_in) 0 0.000000e+00 9.000000e+00 1.216207e-01 3.995271e-06 1 1.000000e-07 9.000000e+00 1.216207e-01 3.995280e-06 2 2.000000e-07 9.000000e+00 1.216207e-01 3.995265e-06 3 4.000000e-07 9.000000e+00 1.216207e-01 3.995282e-06 4 8.000000e-07 9.000000e+00 1.216207e-01 3.995257e-06 5 1.600000e-06 9.000000e+00 1.216207e-01 3.995290e-06 6 3.200000e-06 9.000000e+00 1.216207e-01 3.995250e-06 7 6.400000e-06 9.000000e+00 1.216207e-01 3.995292e-06 8 1.280000e-05 9.000000e+00 1.216207e-01 3.995249e-06 9 2.280000e-05 9.000000e+00 1.216207e-01 3.995292e-06 10 3.280000e-05 9.000000e+00 1.216207e-01 3.995249e-06 11 4.280000e-05 9.000000e+00 1.216207e-01 3.995292e-06 12 5.280000e-05 9.000000e+00 1.216207e-01 3.995249e-06 13 6.280000e-05 9.000000e+00 1.216207e-01 3.995292e-06 14 7.280000e-05 9.000000e+00 1.216207e-01 3.995249e-06 15 8.280000e-05 9.000000e+00 1.216207e-01 3.995292e-06 16 9.280000e-05 9.000000e+00 1.216207e-01 3.995249e-06 17 1.000000e-04 9.000000e+00 1.216207e-01 3.995292e-06 18 1.001000e-04 9.000000e+00 1.216207e-01 3.995267e-06 19 1.002600e-04 9.000000e+00 1.216207e-01 3.995284e-06 20 1.003075e-04 9.000000e+00 1.216207e-01 3.995227e-06 21 1.003906e-04 9.000000e+00 1.216207e-01 3.995299e-06 22 1.004136e-04 9.000000e+00 1.216207e-01 3.995334e-06 23 1.004539e-04 9.000000e+00 1.216207e-01 3.995198e-06 ... (209 more rows) ...
Errores comunes y cómo evitarlos
- Instalar el diodo al revés: El circuito no funcionará incluso con la polaridad correcta de la batería. Asegúrate siempre de que la banda plateada (cátodo) apunte hacia la carga (M1).
- Usar un diodo de señal para cargas altas: Usar un pequeño 1N4148 para un motor de alta corriente puede hacer que el diodo se sobrecaliente y falle. Usa un diodo de la serie 1N400x (clasificación de 1 A) para motores.
- Ignorar la caída de voltaje: Los estudiantes a menudo olvidan que el diodo «consume» alrededor de 0.7 V. Si tu carga requiere exactamente 9 V, suministrar 9 V a través de un diodo podría resultar en un rendimiento inferior (8.3 V).
Solución de problemas
- Síntoma: El motor funciona más lento de lo esperado.
- Causa: La caída de voltaje a través del diodo reduce el voltaje efectivo en el motor.
- Solución: Aumenta ligeramente el voltaje de alimentación o usa un diodo Schottky.
- Síntoma: El diodo se calienta mucho.
- Causa: El motor consume más corriente de la que el diodo soporta.
- Solución: Verifica el consumo de corriente del motor y reemplaza D1 con un diodo de mayor amperaje (p. ej., 1N5408 para 3 A).
- Síntoma: El motor funciona en ambas orientaciones de la batería.
- Causa: El diodo ha fallado en corto (daño interno) o está puenteado por un cable.
- Solución: Prueba el diodo con la función «Prueba de diodo» en un multímetro; reemplázalo si conduce en ambas direcciones.
Posibles mejoras y extensiones
- Mejora con diodo Schottky: Reemplaza el 1N4007 con un 1N5817 (Schottky). Mide la caída de voltaje nuevamente; debería ser menor (~0.3 V), haciendo el circuito más eficiente.
- Puente rectificador de onda completa: Reemplaza el diodo único con un puente rectificador que consta de 4 diodos. Esto permite que el dispositivo funcione independientemente de la polaridad (autocorrección) en lugar de simplemente bloquear la polaridad incorrecta.
Más Casos Prácticos en Prometeo.blog
Encuentra este producto y/o libros sobre este tema en Amazon
Como afiliado de Amazon, gano con las compras que cumplan los requisitos. Si compras a través de este enlace, ayudas a mantener este proyecto.
Quiz rápido

Ingeniero Superior en Electrónica de Telecomunicaciones e Ingeniero en Informática (titulaciones oficiales en España).

