
Nivel: Medio. Diseña un circuito de enclavamiento de seguridad que active una cinta transportadora solo cuando el operador esté presente y se detecte una carga.
Objetivo y caso de uso
En este caso práctico, construirás un circuito lógico de seguridad utilizando una compuerta AND 74HC08 para controlar la activación de un motor de CC mediante un relé. El sistema asegura que la cinta transportadora solo funcione cuando se cumplan simultáneamente dos condiciones de seguridad distintas.
- Aplicación en el mundo real: Enclavamientos de seguridad industrial que impiden el arranque de maquinaria sin un operador en los controles.
- Eficiencia: Ahorro energético automatizado asegurando que la cinta solo funcione cuando realmente haya un producto (carga) en la línea.
- Protección de la máquina: Prevención de «marchas en vacío» que podrían desgastar innecesariamente los componentes mecánicos.
Resultado esperado:
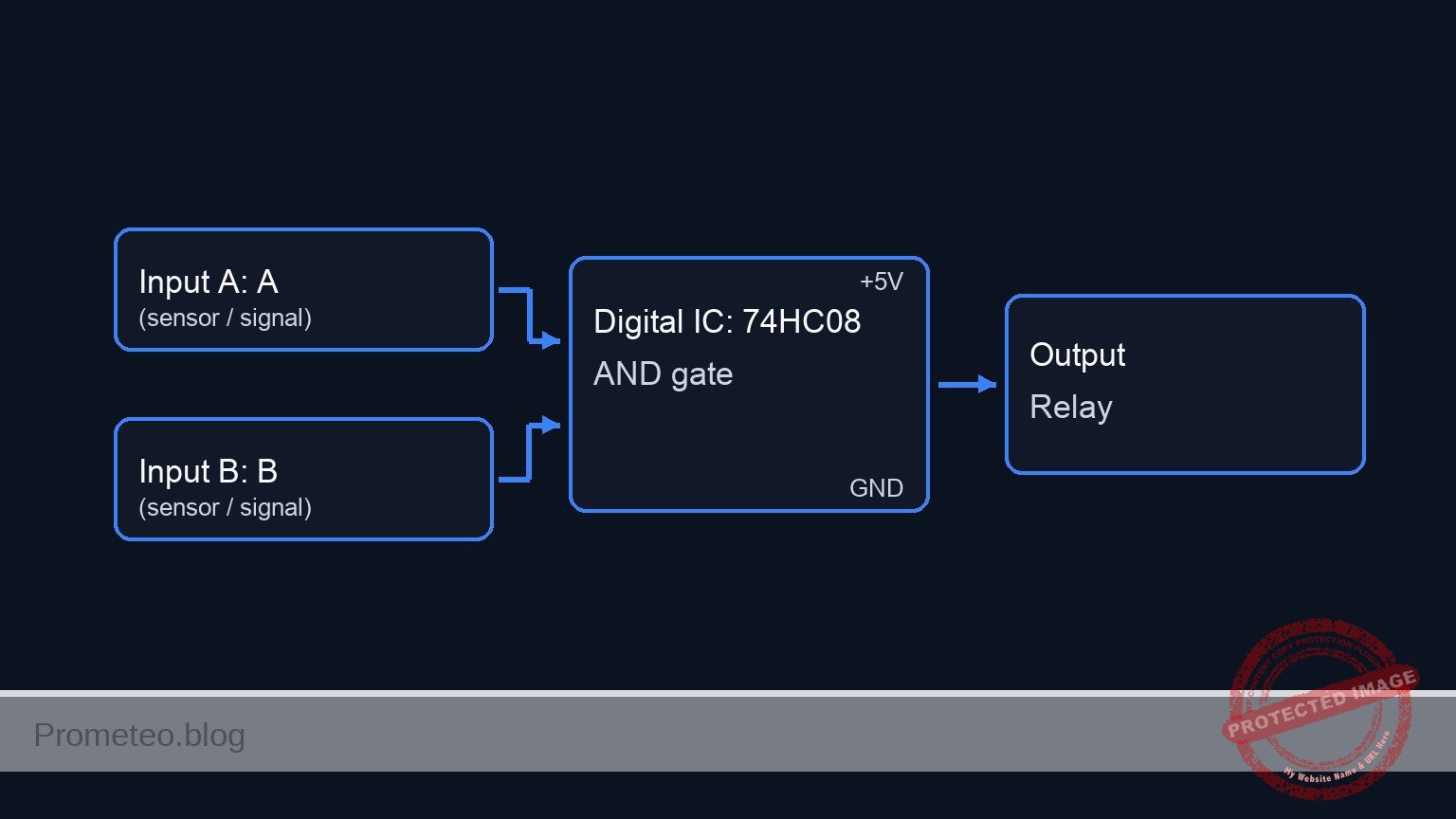
* Salida lógica: El pin de salida del 74HC08 pasa a estado ALTO (aprox. 5V) solo cuando ambas entradas están en ALTO.
* Estado del motor: El motor de CC se ENCIENDE solo cuando se mantiene presionado el botón del operador Y el sensor óptico detecta un objeto.
* Control de corriente: Un transistor amplifica la señal lógica débil para conmutar la bobina del relé de 5V.
* Público objetivo: Estudiantes de ingeniería y técnicos de mantenimiento (Nivel medio).
Materiales
- V1: Fuente de alimentación de 5V CC, función: Alimentación principal del circuito.
- U1: 74HC08 Cuádruple compuerta AND de 2 entradas, función: Procesamiento lógico de seguridad.
- S1: Pulsador (Normalmente Abierto), función: Simula «Presencia del operador».
- S2: Interruptor (SPST) o módulo de fototransistor, función: Simula «Sensor óptico de carga» (Activo en Alto).
- R1: Resistencia de 10 kΩ, función: Pull-down para la entrada del operador (S1).
- R2: Resistencia de 10 kΩ, función: Pull-down para la entrada del sensor (S2).
- R3: Resistencia de 1 kΩ, función: Limitación de corriente de base para Q1.
- Q1: Transistor NPN 2N2222, función: Interruptor controlador del relé.
- D1: Diodo 1N4007, función: Protección flyback para la bobina del relé.
- K1: Relé de 5V (SPDT), función: Interruptor de alta corriente para el motor.
- M1: Motor de 5V CC, función: Accionamiento de la cinta transportadora.
- C1: Condensador de 100 nF, función: Desacoplo para la alimentación de U1.
Pin-out del CI utilizado
Chip: 74HC08 (Cuádruple compuerta AND de 2 entradas)
| Pin | Nombre | Función lógica | Conexión en este caso |
|---|---|---|---|
| 1 | 1A | Entrada A | Conectado al botón del operador (S1) |
| 2 | 1B | Entrada B | Conectado al sensor óptico (S2) |
| 3 | 1Y | Salida | Conectado a la resistencia de base del transistor (R3) |
| 7 | GND | Tierra | Conectado a 0V (GND) |
| 14 | VCC | Alimentación | Conectado a +5V (VCC) |
Nota: Los pines 4-6 y 8-13 no se utilizan en esta aplicación de una sola compuerta y técnicamente deberían conectarse a GND en un entorno sensible al ruido permanente, pero se dejan abiertos para este prototipo básico.
Guía de conexionado
Utiliza los siguientes nodos para tus conexiones: VCC, 0 (Tierra), OP_SIGNAL, LOAD_SIGNAL, LOGIC_OUT.
- Alimentación: Conecta
VCCal riel positivo de V1 y0al riel negativo. - Entrada S1 (Operador): Conecta un lado de S1 a
VCC. Conecta el otro lado al nodoOP_SIGNAL. - Pull-down R1: Conecta R1 entre
OP_SIGNALy0. - Entrada S2 (Sensor): Conecta un lado de S2 a
VCC. Conecta el otro lado al nodoLOAD_SIGNAL. - Pull-down R2: Conecta R2 entre
LOAD_SIGNALy0. - Lógica U1:
- Conecta el Pin 14 de U1 a
VCCy el Pin 7 a0. - Conecta C1 entre
VCCy0cerca de U1. - Conecta
OP_SIGNALal Pin 1 de U1 (Entrada 1A). - Conecta
LOAD_SIGNALal Pin 2 de U1 (Entrada 1B). - Conecta el Pin 3 de U1 (Salida 1Y) al nodo
LOGIC_OUT.
- Conecta el Pin 14 de U1 a
- Etapa de control (Driver):
- Conecta R3 entre
LOGIC_OUTy la Base de Q1. - Conecta el Emisor de Q1 a
0. - Conecta el Colector de Q1 a la bobina del Relé (K1 pin 1).
- Conecta R3 entre
- Relé y Motor:
- Conecta el otro lado de la bobina del Relé (K1 pin 2) a
VCC. - Conecta D1 en paralelo con la bobina del Relé (Cátodo a
VCC, Ánodo al Colector de Q1). - Conecta el Común del Relé (COM) a
VCC. - Conecta el Normal Abierto (NO) del Relé al terminal positivo de M1.
- Conecta el terminal negativo de M1 a
0.
- Conecta el otro lado de la bobina del Relé (K1 pin 2) a
Diagrama de bloques conceptual
Esquemático
[ INPUTS ] [ LOGIC ] [ OUTPUT STAGE ]
(VCC) (VCC)
| |
[ S1: Operator ]--(OP_SIGNAL)-->+-------------+ +----+----+
| | Pin 1 (A) | | K1 Coil | (Parallel D1)
[ R1: 10k ] | | +----+----+
| | 74HC08 | ^
(GND) | U1 | |
| |--(Pin 3)-->[ R3: 1k ]-->[ Q1: NPN ]
(VCC) | | (LOGIC_OUT) |
| | | v
[ S2: Sensor ]--(LOAD_SIGNAL)-->| Pin 2 (B) | (GND)
| | |
[ R2: 10k ] +-------------+ (VCC)
| | |
(GND) [ C1 ] [ K1 Switch ]
| |
(GND) v
[ M1: Motor ]
|
(GND)
Tabla de verdad
Esta tabla representa los estados lógicos requeridos para arrancar el motor.
| Operador (S1) | Carga detectada (S2) | Salida U1 (Pin 3) | Transistor Q1 | Estado del motor |
|---|---|---|---|---|
| Bajo (0) | Bajo (0) | Bajo (0) | OFF (Corte) | PARO |
| Bajo (0) | Alto (1) | Bajo (0) | OFF (Corte) | PARO |
| Alto (1) | Bajo (0) | Bajo (0) | OFF (Corte) | PARO |
| Alto (1) | Alto (1) | Alto (1) | ON (Sat) | MARCHA |
Mediciones y pruebas
Valida el funcionamiento del circuito utilizando un multímetro:
- Verificación de entradas: Mide el voltaje en
OP_SIGNALcon respecto a GND. Debería ser 0V cuando S1 está abierto y 5V cuando está presionado. Repite paraLOAD_SIGNAL(S2). - Salida lógica: Con S1 y S2 activos, mide el voltaje en
LOGIC_OUT. Debería ser aproximadamente igual a VCC (Lógica Alta). Si se suelta cualquiera de los dos, debería caer a ~0V. - Corriente de base (I_b): Configura tu multímetro en modo Amperímetro. Colócalo en serie con R3. Cuando la lógica es Alta, deberías medir aproximadamente 4.3mA (calculado como $(5V – 0.7V) / 1000\Omega$). Esto confirma que el transistor está siendo excitado lo suficiente para saturarse.
- Actuación del relé: Escucha el «clic» del relé cuando ambas entradas estén activas. Mide el voltaje en los terminales del Motor; debería marcar 5V.
Netlist SPICE y simulación
Netlist SPICE de referencia (ngspice) — extractoNetlist SPICE completo (ngspice)
* Title: Practical case: Conveyor belt start system
* --- Power Supply ---
* V1: 5V DC Power Supply
V1 VCC 0 DC 5
* --- Input S1: Operator Presence ---
* Component: Push button (NO) modeled as Voltage-Controlled Switch
* Wiring: VCC -> S1 -> OP_SIGNAL -> R1 -> 0
S1 VCC OP_SIGNAL CTRL_OP 0 SW_BTN
R1 OP_SIGNAL 0 10k
* Stimulus: Simulate button press (High) from t=1ms to t=4ms
V_ACT_S1 CTRL_OP 0 PULSE(0 5 1m 10u 10u 3m 10m)
* --- Input S2: Optical Load Sensor ---
* Component: Switch/Sensor modeled as Voltage-Controlled Switch
* Wiring: VCC -> S2 -> LOAD_SIGNAL -> R2 -> 0
S2 VCC LOAD_SIGNAL CTRL_LOAD 0 SW_BTN
R2 LOAD_SIGNAL 0 10k
* Stimulus: Simulate sensor active (High) from t=2ms to t=5ms
V_ACT_S2 CTRL_LOAD 0 PULSE(0 5 2m 10u 10u 3m 10m)
* --- Logic U1: 74HC08 Quad AND Gate ---
* Wiring: Pin 14=VCC, Pin 7=0, Pin 1=OP_SIGNAL, Pin 2=LOAD_SIGNAL, Pin 3=LOGIC_OUT
* Decoupling Capacitor C1
C1 VCC 0 100n
* Instantiation of Logic Gate Subcircuit
XU1 OP_SIGNAL LOAD_SIGNAL LOGIC_OUT VCC 0 74HC08_GATE
* --- Driver Stage ---
* ... (truncated in public view) ...Copia este contenido en un archivo .cir y ejecútalo con ngspice.
* Title: Practical case: Conveyor belt start system
* --- Power Supply ---
* V1: 5V DC Power Supply
V1 VCC 0 DC 5
* --- Input S1: Operator Presence ---
* Component: Push button (NO) modeled as Voltage-Controlled Switch
* Wiring: VCC -> S1 -> OP_SIGNAL -> R1 -> 0
S1 VCC OP_SIGNAL CTRL_OP 0 SW_BTN
R1 OP_SIGNAL 0 10k
* Stimulus: Simulate button press (High) from t=1ms to t=4ms
V_ACT_S1 CTRL_OP 0 PULSE(0 5 1m 10u 10u 3m 10m)
* --- Input S2: Optical Load Sensor ---
* Component: Switch/Sensor modeled as Voltage-Controlled Switch
* Wiring: VCC -> S2 -> LOAD_SIGNAL -> R2 -> 0
S2 VCC LOAD_SIGNAL CTRL_LOAD 0 SW_BTN
R2 LOAD_SIGNAL 0 10k
* Stimulus: Simulate sensor active (High) from t=2ms to t=5ms
V_ACT_S2 CTRL_LOAD 0 PULSE(0 5 2m 10u 10u 3m 10m)
* --- Logic U1: 74HC08 Quad AND Gate ---
* Wiring: Pin 14=VCC, Pin 7=0, Pin 1=OP_SIGNAL, Pin 2=LOAD_SIGNAL, Pin 3=LOGIC_OUT
* Decoupling Capacitor C1
C1 VCC 0 100n
* Instantiation of Logic Gate Subcircuit
XU1 OP_SIGNAL LOAD_SIGNAL LOGIC_OUT VCC 0 74HC08_GATE
* --- Driver Stage ---
* Wiring: LOGIC_OUT -> R3 -> Q1 Base
R3 LOGIC_OUT Q1_BASE 1k
* Wiring: Q1 Collector -> Relay Coil, Emitter -> 0
Q1 RELAY_COIL_LOW Q1_BASE 0 2N2222MOD
* --- Relay K1 ---
* Wiring: VCC -> Coil -> Q1 Collector (RELAY_COIL_LOW)
* Coil modeled as Inductance + Resistance
L_K1 VCC K1_INT 10m
R_K1 K1_INT RELAY_COIL_LOW 100
* Flyback Diode D1
* Wiring: Cathode to VCC, Anode to Q1 Collector
D1 RELAY_COIL_LOW VCC 1N4007MOD
* Relay Contact (Switch)
* Wiring: COM (VCC) -> NO (MOTOR_POS)
* Controlled by voltage across the coil: V(VCC) - V(RELAY_COIL_LOW)
* FIXED: Connected negative control node to Ground (0) to fix Singular Matrix error
E_K1_SENSE K1_CTRL_P 0 VOL = 'V(VCC) - V(RELAY_COIL_LOW)'
S_K1 VCC MOTOR_POS K1_CTRL_P 0 SW_RELAY
* --- Motor M1 ---
* Wiring: MOTOR_POS -> Motor -> 0
* Modeled as an inductive load
R_M1 MOTOR_POS M1_INT 10
L_M1 M1_INT 0 1m
* --- Models & Subcircuits ---
* Button/Sensor Switch Model
.model SW_BTN SW(Vt=2.5 Vh=0.1 Ron=0.1 Roff=10Meg)
* Relay Contact Switch Model (Activates when coil voltage > 3.5V)
.model SW_RELAY SW(Vt=3.5 Vh=0.5 Ron=0.05 Roff=100Meg)
* Transistor Model
.model 2N2222MOD NPN(IS=1E-14 BF=200 VAF=100 IKF=0.3 XTB=1.5 BR=3 CJC=8p CJE=25p)
* Diode Model
.model 1N4007MOD D(IS=7n RS=0.03 N=1.2 BV=1000 IBV=5u CJO=10p TT=100n)
* 74HC08 AND Gate Behavioral Model
* Pins: A B Y VCC GND
.subckt 74HC08_GATE A B Y VCC GND
* Continuous Sigmoid function for convergence: 5V * sigmoid(A) * sigmoid(B)
B_AND Y GND V = V(VCC) * (1 / (1 + exp(-50*(V(A)-2.5)))) * (1 / (1 + exp(-50*(V(B)-2.5))))
.ends
* --- Simulation Directives ---
.op
* Transient analysis: 10us step, 8ms total time
.tran 10u 8m
* Print required voltages
.print tran V(OP_SIGNAL) V(LOAD_SIGNAL) V(LOGIC_OUT) V(RELAY_COIL_LOW) V(MOTOR_POS)
.endResultados de Simulación (Transitorio)

Show raw data table (7686 rows)
Index time v(op_signal) v(load_signal) v(logic_out) 0 0.000000e+00 4.995005e-03 4.995005e-03 2.199277e-108 1 1.000000e-07 4.995005e-03 4.995005e-03 2.199277e-108 2 2.000000e-07 4.995005e-03 4.995005e-03 2.199277e-108 3 4.000000e-07 4.995005e-03 4.995005e-03 2.199277e-108 4 8.000000e-07 4.995005e-03 4.995005e-03 2.199277e-108 5 1.600000e-06 4.995005e-03 4.995005e-03 2.199277e-108 6 3.200000e-06 4.995005e-03 4.995005e-03 2.199277e-108 7 6.400000e-06 4.995005e-03 4.995005e-03 2.199277e-108 8 1.280000e-05 4.995005e-03 4.995005e-03 2.199277e-108 9 2.280000e-05 4.995005e-03 4.995005e-03 2.199277e-108 10 3.280000e-05 4.995005e-03 4.995005e-03 2.199277e-108 11 4.280000e-05 4.995005e-03 4.995005e-03 2.199277e-108 12 5.280000e-05 4.995005e-03 4.995005e-03 2.199277e-108 13 6.280000e-05 4.995005e-03 4.995005e-03 2.199277e-108 14 7.280000e-05 4.995005e-03 4.995005e-03 2.199277e-108 15 8.280000e-05 4.995005e-03 4.995005e-03 2.199277e-108 16 9.280000e-05 4.995005e-03 4.995005e-03 2.199277e-108 17 1.028000e-04 4.995005e-03 4.995005e-03 2.199277e-108 18 1.128000e-04 4.995005e-03 4.995005e-03 2.199277e-108 19 1.228000e-04 4.995005e-03 4.995005e-03 2.199277e-108 20 1.328000e-04 4.995005e-03 4.995005e-03 2.199277e-108 21 1.428000e-04 4.995005e-03 4.995005e-03 2.199277e-108 22 1.528000e-04 4.995005e-03 4.995005e-03 2.199277e-108 23 1.628000e-04 4.995005e-03 4.995005e-03 2.199277e-108 ... (7662 more rows) ...
Errores comunes y cómo evitarlos
- Accionar directamente el motor: Los estudiantes a menudo conectan el motor directamente a la salida del 74HC08. El chip solo puede suministrar ~20mA, mientras que un motor necesita cientos de mA. Solución: Utiliza siempre una interfaz con transistor (Q1) y relé.
- Entradas flotantes: Olvidar las resistencias R1 y R2 hace que las entradas queden «flotantes», provocando un comportamiento errático del motor activado por electricidad estática. Solución: Asegúrate de que las resistencias pull-down estén firmemente conectadas a Tierra.
- Falta del diodo flyback: Omitir D1 permite que los picos de alto voltaje de la bobina del relé destruyan el transistor Q1 cuando se apaga. Solución: Instala D1 en paralelo con la bobina, con el cátodo apuntando a VCC.
Solución de problemas
- El motor no funciona: Comprueba si el relé hace clic. Si no hay clic, verifica el voltaje en el Pin 3 de U1 (Salida Lógica). Si la Salida Lógica es 5V pero el relé no hace clic, verifica la orientación de Q1.
- Salida Lógica siempre Alta: Comprueba si R1 o R2 están desconectadas (las entradas flotantes a menudo se leen como Alta en algunas familias lógicas, aunque 74HC suele flotar aleatoriamente). Verifica el cableado de S1/S2.
- El chip se calienta: Comprueba si U1 está conectado al revés (el Pin 14 debe ser VCC, el Pin 7 GND). Asegúrate de que las salidas no estén en cortocircuito a tierra.
Posibles mejoras y extensiones
- Circuito de auto-enclavamiento: Reemplaza la lógica con un latch o añade un bucle de retroalimentación para que el operador pueda presionar un botón de «Inicio» una vez, y la cinta siga funcionando hasta que se presione «Parada» o se retire la carga.
- Parada de emergencia: Añade una compuerta NOT 74HC04 o utiliza una configuración NAND para incluir un botón de Parada de Emergencia «Normalmente Cerrado» que corte inmediatamente la alimentación del relé independientemente de otras entradas.
Más Casos Prácticos en Prometeo.blog
Encuentra este producto y/o libros sobre este tema en Amazon
Como afiliado de Amazon, gano con las compras que cumplan los requisitos. Si compras a través de este enlace, ayudas a mantener este proyecto.
Quiz rápido

Ingeniero Superior en Electrónica de Telecomunicaciones e Ingeniero en Informática (titulaciones oficiales en España).

