

Nivel: Medio. Diseña un circuito de control para arrancar maquinaria industrial desde un panel principal o un mando remoto de seguridad.
Objetivo y caso de uso
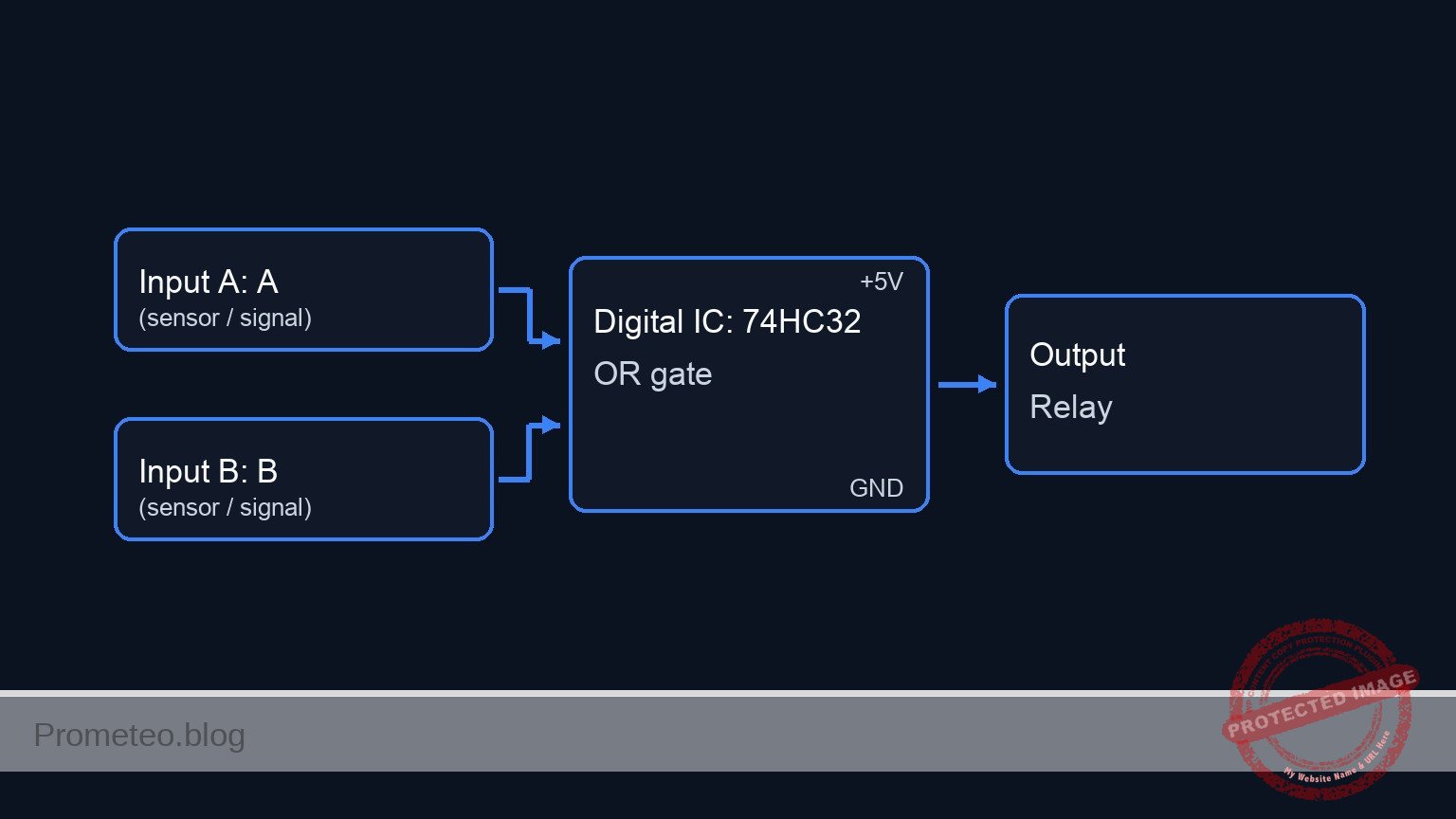
En este caso práctico, construirás un circuito de control digital utilizando una compuerta lógica OR para operar un motor de CC de alta potencia a través de un relé. El sistema permite arrancar el motor desde dos ubicaciones físicas distintas: el panel de control principal o una estación de seguridad remota.
- Redundancia operativa: Asegura que la maquinaria pueda activarse desde una ubicación secundaria si el panel primario es inaccesible.
- Conveniencia: Permite a los operadores arrancar una cinta transportadora o un ventilador desde cualquier extremo de una línea de producción.
- Aislamiento de señal: Utiliza lógica de bajo voltaje (5 V) para conmutar de forma segura una carga inductiva de alta potencia (motor) a través de un controlador de relé.
Resultado esperado:
* Presionar el Botón A (Principal) arranca el motor inmediatamente.
* Presionar el Botón B (Remoto) arranca el motor inmediatamente.
* La salida lógica Alta ($V_{OH}$) mide aproximadamente 5 V cuando se presiona cualquiera de los botones.
* El relé produce un «clic» audible y el motor de CC gira cuando se cumple la condición lógica.
Público objetivo: Estudiantes de electrónica y aficionados familiarizados con compuertas lógicas básicas y manejo de relés.
Materiales
- V1: Fuente de alimentación de 5 V CC, función: Lógica principal y alimentación del relé
- U1: 74HC32, función: Cuádruple compuerta OR de 2 entradas
- S1: Pulsador (normalmente abierto), función: Panel de arranque principal
- S2: Pulsador (normalmente abierto), función: Mando de arranque remoto
- R1: Resistencia de 10 kΩ, función: Pull-down para Entrada A
- R2: Resistencia de 10 kΩ, función: Pull-down para Entrada B
- R3: Resistencia de 1 kΩ, función: Limitación de corriente de base del transistor
- Q1: Transistor NPN 2N2222, función: Interruptor controlador del relé
- D1: Diodo 1N4007, función: Protección flyback para la bobina del relé
- K1: Relé de 5 V (SPDT), función: Conmutación de alta corriente
- M1: Motor de 5 V CC, función: Simulación de carga industrial
Pin-out del CI utilizado
Chip: 74HC32 (Cuádruple compuerta OR de 2 entradas)
| Pin | Nombre | Función lógica | Conexión en este caso |
|---|---|---|---|
| 1 | 1A | Entrada A | Conectado al Nodo START_MAIN |
| 2 | 1B | Entrada B | Conectado al Nodo START_REMOTE |
| 3 | 1Y | Salida | Conectado al Nodo LOGIC_OUT |
| 7 | GND | Tierra | Conectado al Nodo 0 |
| 14 | VCC | Fuente de alimentación | Conectado al Nodo VCC |
Guía de conexionado
- V1 se conecta entre el nodo
VCCy el nodo0(GND). - S1 se conecta entre el nodo
VCCy el nodoSTART_MAIN. - R1 se conecta entre el nodo
START_MAINy el nodo0. - S2 se conecta entre el nodo
VCCy el nodoSTART_REMOTE. - R2 se conecta entre el nodo
START_REMOTEy el nodo0. - U1 Pin 1 (1A) se conecta al nodo
START_MAIN. - U1 Pin 2 (1B) se conecta al nodo
START_REMOTE. - U1 Pin 3 (1Y) se conecta al nodo
LOGIC_OUT. - U1 Pin 14 (VCC) se conecta al nodo
VCC. - U1 Pin 7 (GND) se conecta al nodo
0. - R3 se conecta entre el nodo
LOGIC_OUTy el nodoBASE_DRIVE. - Q1 Base se conecta al nodo
BASE_DRIVE. - Q1 Emisor se conecta al nodo
0. - Q1 Colector se conecta al nodo
RELAY_COIL_LO. - K1 Positivo de la bobina se conecta entre el nodo
VCCy el nodoRELAY_COIL_LO(Nota: La bobina conecta VCC al Colector). - D1 se conecta entre el nodo
RELAY_COIL_LO(Ánodo) y el nodoVCC(Cátodo) (Polarización inversa). - K1 Contacto común se conecta al nodo
VCC. - K1 Contacto Normalmente Abierto (NO) se conecta al nodo
MOTOR_PWR. - M1 se conecta entre el nodo
MOTOR_PWRy el nodo0.
Diagrama de bloques conceptual
Esquemático
Practical case: Redundant motor starter system
[ INPUTS ] [ LOGIC ] [ DRIVER ] [ OUTPUT / LOAD ]
[ S1: Main Start ] --+
|
[ R1: Pull-down ] --+--(Pin 1)-->+------------+
| |
| U1: 74HC32 | (Base Sig)
| (OR Gate) |--(Pin 3)--> [ R3: 1k ] --> [ Q1: NPN ] --(Sink)--> [ K1: Relay Coil ]
| | | (w/ D1 Diode)
[ S2: Remote Cmd ] --+--(Pin 2)-->+------------+ [ GND ] |
| (Magnetic)
[ R2: Pull-down ] --+ |
v
[ K1: NO Contact ]
|
(Switched 5V)
|
v
[ M1: DC Motor ]
|
[ GND ]
Tabla de verdad
Este sistema utiliza lógica positiva (activa en ALTO).
| Entrada A (Principal) | Entrada B (Remota) | Salida Y (Lógica) | Estado del relé | Estado del motor |
|---|---|---|---|---|
| 0 (Abierto) | 0 (Abierto) | 0 (Bajo) | APAGADO | Detenido |
| 0 (Abierto) | 1 (Presionado) | 1 (Alto) | ENCENDIDO | En marcha |
| 1 (Presionado) | 0 (Abierto) | 1 (Alto) | ENCENDIDO | En marcha |
| 1 (Presionado) | 1 (Presionado) | 1 (Alto) | ENCENDIDO | En marcha |
Mediciones y pruebas
- Validación de entrada ($V_{in_high}$): Sin presionar ningún botón, mida el voltaje en
START_MAINySTART_REMOTE. Debería ser 0 V. Presione S1 y verifique que el voltaje suba a aprox. 5 V. - Verificación de salida lógica ($V_{out_logic}$): Coloque una sonda de multímetro en el Pin 3 de U1. Presione S1 O S2. El voltaje debería saltar de cerca de 0 V a $\approx$ 5 V.
- Prueba de actuador (RPM del motor): Observe el motor. Debería girar cuando la salida lógica es Alta. Si utiliza un tacómetro, verifique que
Motor_RPMsea consistente independientemente de qué botón (S1 o S2) activó el arranque.
Netlist SPICE y simulación
Netlist SPICE de referencia (ngspice) — extractoNetlist SPICE completo (ngspice)
* Redundant motor starter system
* Created based on BOM and Wiring Guide
* --- Power Supply ---
* V1: 5 V DC power supply
V1 VCC 0 DC 5
* --- Input Section ---
* S1: Pushbutton (Main Start)
* Wiring: Connects VCC to START_MAIN.
* Implementation: Voltage Controlled Switch driven by a Stimulus Pulse (V_ACT1)
* Timing: Period 200us, covers logic states 00, 10, 11, 01 combined with S2
V_ACT1 ACT1 0 PULSE(0 5 10u 1u 1u 100u 200u)
S1 VCC START_MAIN ACT1 0 SW_PUSH
* R1: 10 kΩ resistor (Pull-down for Input A)
R1 START_MAIN 0 10k
* S2: Pushbutton (Remote Start)
* Wiring: Connects VCC to START_REMOTE.
* Implementation: Voltage Controlled Switch driven by a Stimulus Pulse (V_ACT2)
V_ACT2 ACT2 0 PULSE(0 5 10u 1u 1u 200u 400u)
S2 VCC START_REMOTE ACT2 0 SW_PUSH
* R2: 10 kΩ resistor (Pull-down for Input B)
R2 START_REMOTE 0 10k
* Model for Pushbuttons
.model SW_PUSH SW(Vt=2.5 Ron=0.1 Roff=10Meg)
* ... (truncated in public view) ...Copia este contenido en un archivo .cir y ejecútalo con ngspice.
* Redundant motor starter system
* Created based on BOM and Wiring Guide
* --- Power Supply ---
* V1: 5 V DC power supply
V1 VCC 0 DC 5
* --- Input Section ---
* S1: Pushbutton (Main Start)
* Wiring: Connects VCC to START_MAIN.
* Implementation: Voltage Controlled Switch driven by a Stimulus Pulse (V_ACT1)
* Timing: Period 200us, covers logic states 00, 10, 11, 01 combined with S2
V_ACT1 ACT1 0 PULSE(0 5 10u 1u 1u 100u 200u)
S1 VCC START_MAIN ACT1 0 SW_PUSH
* R1: 10 kΩ resistor (Pull-down for Input A)
R1 START_MAIN 0 10k
* S2: Pushbutton (Remote Start)
* Wiring: Connects VCC to START_REMOTE.
* Implementation: Voltage Controlled Switch driven by a Stimulus Pulse (V_ACT2)
V_ACT2 ACT2 0 PULSE(0 5 10u 1u 1u 200u 400u)
S2 VCC START_REMOTE ACT2 0 SW_PUSH
* R2: 10 kΩ resistor (Pull-down for Input B)
R2 START_REMOTE 0 10k
* Model for Pushbuttons
.model SW_PUSH SW(Vt=2.5 Ron=0.1 Roff=10Meg)
* --- Logic Section ---
* U1: 74HC32 Quad 2-input OR gate
* Pins: 1(A), 2(B), 3(Y), 7(GND), 14(VCC)
* Implemented as a subcircuit to expose all pins
XU1 START_MAIN START_REMOTE LOGIC_OUT VCC 0 74HC32_OR
.subckt 74HC32_OR A B Y VCC GND
* Behavioral OR logic using continuous tanh function for convergence
* Logic: If (A + B) > Threshold(2.5V), Output High
* Function scales 0-1 range to 0-5V
B1 Y GND V = 5 * (tanh(10 * (V(A) + V(B) - 2.5)) + 1) / 2
.ends
* --- Driver Section ---
* R3: 1 kΩ resistor (Base current limiting)
R3 LOGIC_OUT BASE_DRIVE 1k
* Q1: 2N2222 NPN Transistor (Relay driver)
* Connections: Base=BASE_DRIVE, Collector=RELAY_COIL_LO, Emitter=0
Q1 RELAY_COIL_LO BASE_DRIVE 0 2N2222
.model 2N2222 NPN(IS=1E-14 VAF=100 BF=200 IKF=0.3 XTB=1.5 BR=3 CJC=8p CJE=25p TR=46n TF=411p ITF=0.6 VTF=1.7 XTF=3 RB=10 RC=0.3 RE=0.2)
* --- Relay Section ---
* K1: 5 V Relay (SPDT)
* Coil Connection: VCC to RELAY_COIL_LO
* Modeled as Inductor + Series Resistance
L_K1 VCC K1_INT 10m
R_K1_COIL K1_INT RELAY_COIL_LO 100
* D1: 1N4007 Diode (Flyback protection)
* Connections: Anode=RELAY_COIL_LO, Cathode=VCC
D1 RELAY_COIL_LO VCC 1N4007
.model 1N4007 D(IS=7n RS=0.034 N=1.26 BV=1000 IBV=5u CJO=10p)
* Relay Contact Switch
* Wiring: Common(VCC) to NO(MOTOR_PWR)
* Controlled by voltage across the coil (VCC - RELAY_COIL_LO)
* Threshold set to 3V (Energized state)
S_K1 VCC MOTOR_PWR VCC RELAY_COIL_LO SW_RELAY
.model SW_RELAY SW(Vt=3.0 Ron=0.05 Roff=100Meg)
* --- Motor Load ---
* M1: 5 V DC Motor
* Wiring: MOTOR_PWR to 0
* Modeled as resistive load with slight inductance
R_M1 MOTOR_PWR M1_INT 20
L_M1 M1_INT 0 1m
* --- Simulation Directives ---
.op
.tran 1u 500u
* Print directive for transient analysis
.print tran V(START_MAIN) V(START_REMOTE) V(LOGIC_OUT) V(BASE_DRIVE) V(RELAY_COIL_LO) V(MOTOR_PWR)
.endResultados de Simulación (Transitorio)

Show raw data table (1304 rows)
Index time v(start_main) v(start_remote) v(logic_out) 0 0.000000e+00 4.995005e-03 4.995005e-03 0.000000e+00 1 1.000000e-08 4.995005e-03 4.995005e-03 0.000000e+00 2 2.000000e-08 4.995005e-03 4.995005e-03 0.000000e+00 3 4.000000e-08 4.995005e-03 4.995005e-03 0.000000e+00 4 8.000000e-08 4.995005e-03 4.995005e-03 0.000000e+00 5 1.600000e-07 4.995005e-03 4.995005e-03 0.000000e+00 6 3.200000e-07 4.995005e-03 4.995005e-03 0.000000e+00 7 6.400000e-07 4.995005e-03 4.995005e-03 0.000000e+00 8 1.280000e-06 4.995005e-03 4.995005e-03 0.000000e+00 9 2.280000e-06 4.995005e-03 4.995005e-03 0.000000e+00 10 3.280000e-06 4.995005e-03 4.995005e-03 0.000000e+00 11 4.280000e-06 4.995005e-03 4.995005e-03 0.000000e+00 12 5.280000e-06 4.995005e-03 4.995005e-03 0.000000e+00 13 6.280000e-06 4.995005e-03 4.995005e-03 0.000000e+00 14 7.280000e-06 4.995005e-03 4.995005e-03 0.000000e+00 15 8.280000e-06 4.995005e-03 4.995005e-03 0.000000e+00 16 9.280000e-06 4.995005e-03 4.995005e-03 0.000000e+00 17 1.000000e-05 4.995005e-03 4.995005e-03 0.000000e+00 18 1.010000e-05 4.995005e-03 4.995005e-03 0.000000e+00 19 1.026000e-05 4.995005e-03 4.995005e-03 0.000000e+00 20 1.030750e-05 4.995005e-03 4.995005e-03 0.000000e+00 21 1.039062e-05 4.995005e-03 4.995005e-03 0.000000e+00 22 1.041363e-05 4.995005e-03 4.995005e-03 0.000000e+00 23 1.045390e-05 4.995005e-03 4.995005e-03 0.000000e+00 ... (1280 more rows) ...
Errores comunes y cómo evitarlos
- Entradas flotantes: Olvidar R1 o R2 permite que los pines de entrada «floten», causando que el motor se encienda aleatoriamente debido al ruido electrostático. Utilice siempre resistencias pull-down con la serie 74HC.
- Falta del diodo flyback: Omitir D1 permite que los picos de alto voltaje de la bobina del relé destruyan Q1 o reinicien U1 cuando el motor se apaga. Instale siempre el diodo en paralelo inverso a la bobina.
- Manejar el relé directamente: Intentar alimentar la bobina del relé directamente desde el Pin 3 de U1 dañará el CI, ya que las compuertas lógicas no pueden suministrar suficiente corriente. Utilice siempre un transistor (Q1) como controlador.
Solución de problemas
- Síntoma: El motor funciona continuamente y nunca se detiene.
- Causa: Una entrada está flotando o en cortocircuito a VCC.
- Solución: Verifique las conexiones de R1/R2 y asegúrese de que los botones no sean del tipo «Normalmente Cerrados».
- Síntoma: La salida lógica se pone en Alto, pero el relé no hace clic.
- Causa: El transistor Q1 no está conduciendo o R3 es demasiado alta.
- Solución: Verifique el pin-out de Q1 (C-B-E) y asegúrese de que el emisor vaya a Tierra.
- Síntoma: El sistema se reinicia o falla cuando el relé se apaga.
- Causa: Ruido de retroceso inductivo (kickback).
- Solución: Verifique que D1 esté instalado correctamente (Cátodo a VCC) y agregue un condensador de desacoplo de 100 nF cerca de VCC de U1.
Posibles mejoras y extensiones
- Circuito de enclavamiento: Agregue un bucle de retroalimentación para que el motor permanezca encendido después de soltar el botón (estación de Marcha/Paro).
- Interbloqueo de seguridad: Agregue un 74HC08 (compuerta AND) en serie con un «Interruptor de seguridad» para que el motor solo funcione si la protección está cerrada Y se presiona un botón.
Más Casos Prácticos en Prometeo.blog
Encuentra este producto y/o libros sobre este tema en Amazon
Como afiliado de Amazon, gano con las compras que cumplan los requisitos. Si compras a través de este enlace, ayudas a mantener este proyecto.
Quiz rápido

Ingeniero Superior en Electrónica de Telecomunicaciones e Ingeniero en Informática (titulaciones oficiales en España).

