Nivel: Medio. Implementar un sistema de seguridad que detenga una cinta transportadora si el sensor de temperatura O el sensor de atasco detectan una anomalía.
Objetivo y caso de uso
Construirás un circuito de control lógico utilizando una puerta OR para combinar señales de dos sensores de seguridad distintos (Temperatura y Atasco Óptico). Cuando cualquiera de los sensores detecte una falla (Lógica Alta), el sistema emitirá una señal activa para activar un indicador o un mecanismo de parada.
Por qué es útil:
* Seguridad industrial: Evita que la maquinaria opere bajo condiciones peligrosas.
* Protección de equipos: Detiene los motores inmediatamente si se sobrecalientan para prevenir daños permanentes.
* Eficiencia del proceso: Detecta atascos físicos en las cintas transportadoras automáticamente, reduciendo el desperdicio.
* Redundancia: Permite que múltiples tipos de errores diferentes activen la misma rutina de parada de emergencia.
Resultado esperado:
* Sistema en espera: Cuando ambos sensores están en Bajo (0 V), el LED de salida está APAGADO.
* Falla de temperatura: Si el sensor de temperatura se activa (Alto/5 V), el LED se ENCIENDE.
* Falla de atasco: Si el sensor de atasco se activa (Alto/5 V), el LED se ENCIENDE.
* Falla crítica: Si ambos sensores se activan simultáneamente, el LED permanece ENCENDIDO.
Público objetivo y nivel: Estudiantes de electrónica y aficionados, Nivel Medio.
Materiales
- V1: Fuente de alimentación de 5 V CC, función: Alimentación del circuito principal.
- U1: 74HC32, función: CI de cuádruple puerta OR de 2 entradas.
- S1: Interruptor de palanca SPST, función: Simula el Sensor de Temperatura (Abierto=Normal, Cerrado=Sobrecalentamiento).
- S2: Interruptor de palanca SPST, función: Simula el Sensor de Atasco (Abierto=Despejado, Cerrado=Atasco).
- R1: Resistencia de 10 kΩ, función: Pull-down para la Entrada de Temperatura.
- R2: Resistencia de 10 kΩ, función: Pull-down para la Entrada de Atasco.
- R3: Resistencia de 330 Ω, función: Limitación de corriente para el indicador LED.
- D1: LED rojo, función: Indicador visual de falla.
Pin-out del CI utilizado
Chip seleccionado: 74HC32 (Cuádruple puerta OR de 2 entradas)
| Pin | Nombre | Función lógica | Conexión en este caso |
|---|---|---|---|
| 1 | 1A | Entrada A | Conectado al Sensor de Temperatura (S1) |
| 2 | 1B | Entrada B | Conectado al Sensor de Atasco (S2) |
| 3 | 1Y | Salida | Conectado al controlador del LED (R3 + D1) |
| 7 | GND | Tierra | Conectado al Negativo de la Fuente de Alimentación (0 V) |
| 14 | VCC | Alimentación (+) | Conectado al Positivo de la Fuente de Alimentación (5 V) |
Guía de conexionado
- VCC: Conectar el terminal positivo de V1 al pin 14 de U1.
- 0 (GND): Conectar el terminal negativo de V1 al pin 7 de U1.
- VA (Señal Temp): Conectar el terminal 2 de S1 al pin 1 de U1.
- VA (Señal Temp): Conectar R1 entre el pin 1 de U1 y 0.
- VCC: Conectar el terminal 1 de S1 a VCC.
- VB (Señal Atasco): Conectar el terminal 2 de S2 al pin 2 de U1.
- VB (Señal Atasco): Conectar R2 entre el pin 2 de U1 y 0.
- VCC: Conectar el terminal 1 de S2 a VCC.
- V_OUT: Conectar el pin 3 de U1 al terminal 1 de R3.
- LED_NODE: Conectar el terminal 2 de R3 al Ánodo de D1.
- 0 (GND): Conectar el Cátodo de D1 a 0.
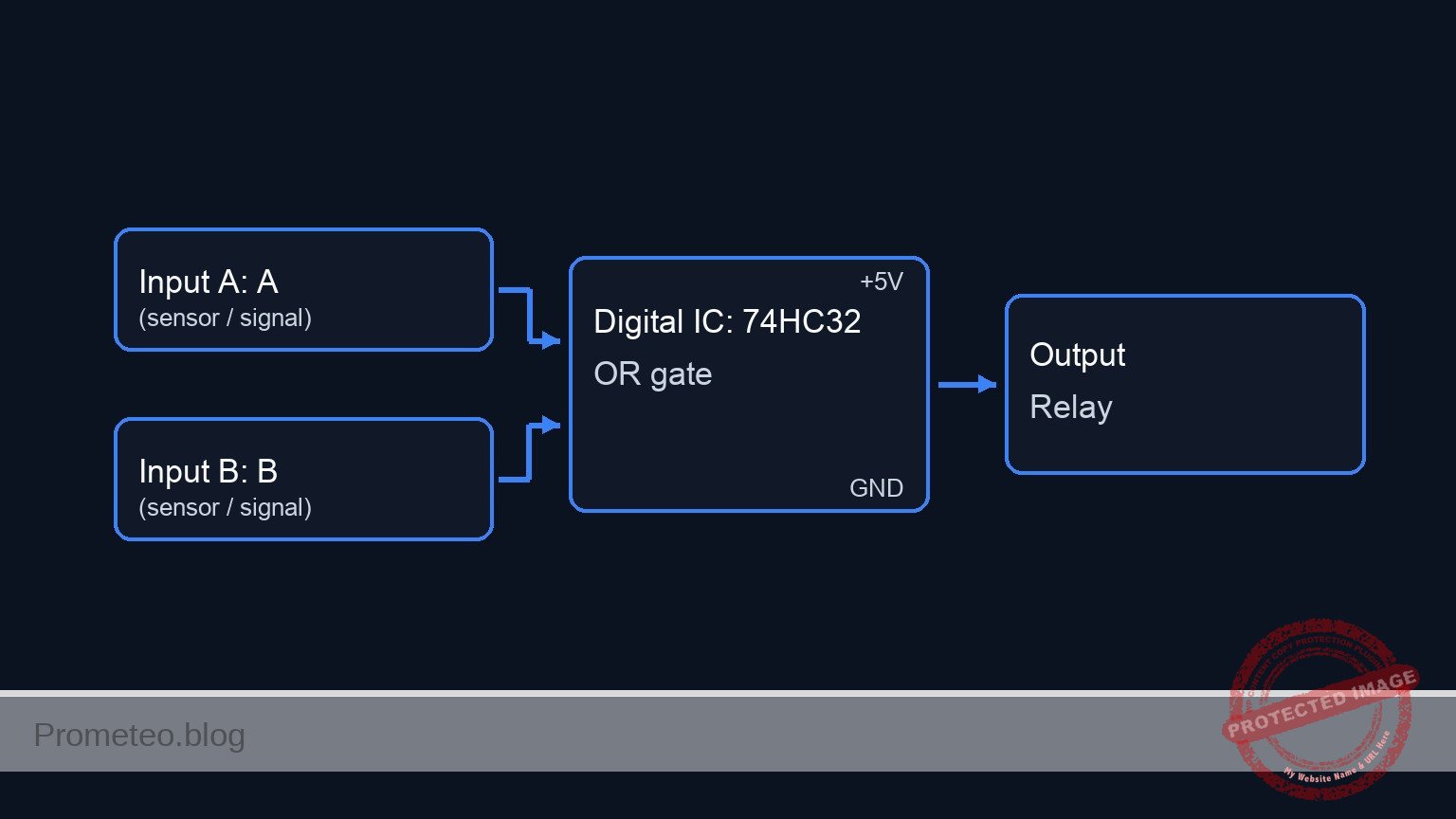
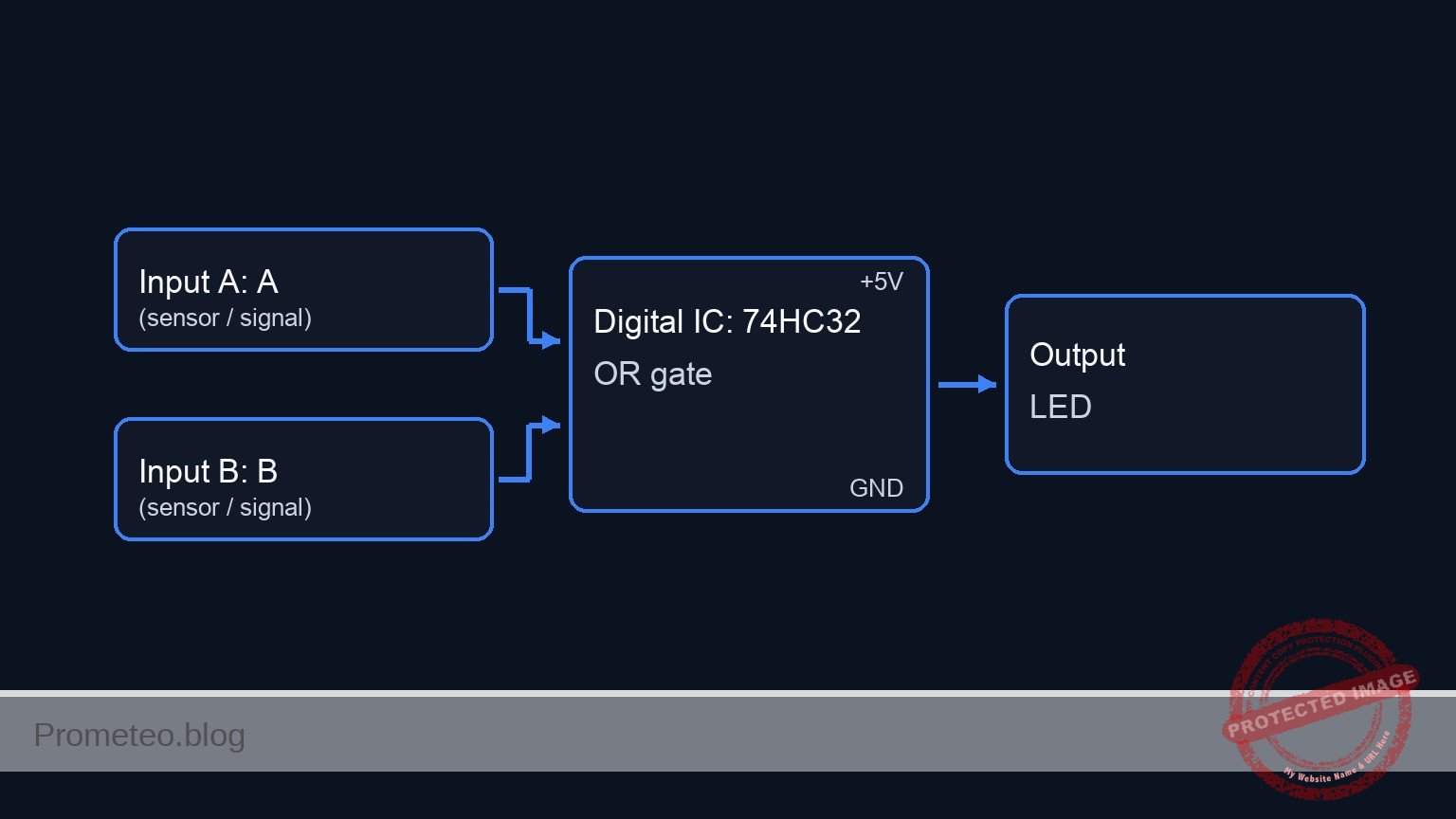
Diagrama de bloques conceptual
Esquemático
Title: Production Line Fault Monitoring (OR Logic)
[ INPUT SENSORS ] [ LOGIC PROCESSING ] [ VISUAL OUTPUT ]
(Pin 14: VCC)
|
v
[ VCC ] --> [ S1: Temp Switch ] --+--(Pin 1)-->+---------------+
| | |
[ R1: 10k ] | U1: 74HC32 |
| | (OR Gate) |--(Pin 3)--> [ R3: 330 ] --> [ D1: LED ] --> [ GND ]
[ GND ] | |
| |
[ VCC ] --> [ S2: Jam Switch ] --+--(Pin 2)-->+---------------+
| ^
[ R2: 10k ] |
| (Pin 7: GND)
[ GND ]
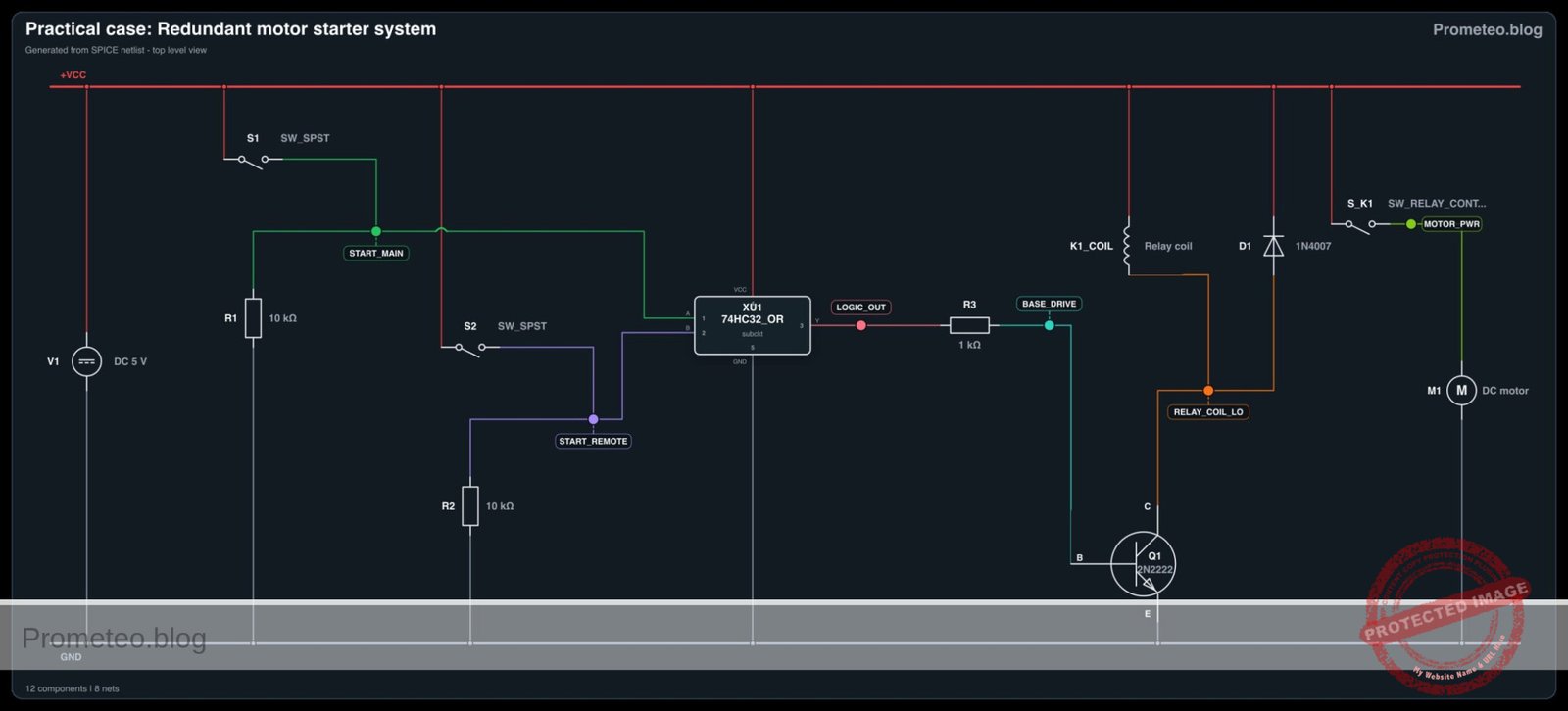
Diagrama eléctrico
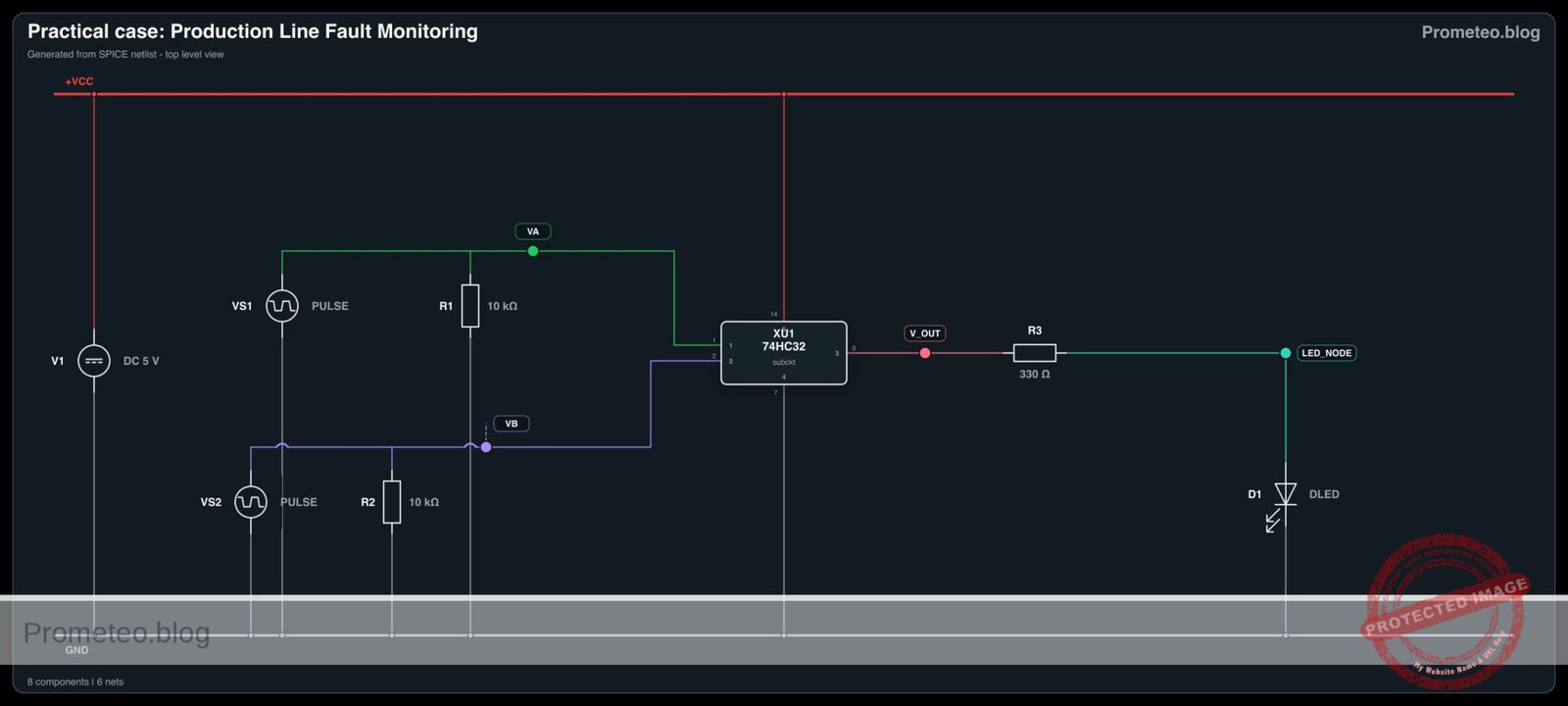
Tabla de verdad
Este circuito utiliza lógica positiva (Activo en Alto).
| Sensor A (Temp) | Sensor B (Atasco) | Salida (Indicador de falla) | Estado del LED |
|---|---|---|---|
| Bajo (0) | Bajo (0) | Bajo (0) | APAGADO |
| Bajo (0) | Alto (1) | Alto (1) | ENCENDIDO |
| Alto (1) | Bajo (0) | Alto (1) | ENCENDIDO |
| Alto (1) | Alto (1) | Alto (1) | ENCENDIDO |
Mediciones y pruebas
- Verificación en espera: Asegúrese de que ambos interruptores S1 y S2 estén abiertos. Mida el voltaje en el Pin 3 de U1 con respecto a GND. Debería ser ~0 V. El LED debería estar APAGADO.
- Simulación de falla de temperatura: Cierre S1 mientras mantiene S2 abierto. Mida el voltaje en el Pin 1 (Entrada A). Debería ser 5 V. La Salida en el Pin 3 debería pasar a Alto (~5 V) y el LED debe encenderse.
- Simulación de falla de atasco: Abra S1 y cierre S2. Mida el voltaje en el Pin 2 (Entrada B). Debería ser 5 V. El LED debe encenderse.
- Falla simultánea: Cierre tanto S1 como S2. El LED debe permanecer ENCENDIDO.
Netlist SPICE y simulación
Netlist SPICE de referencia (ngspice) — extractoNetlist SPICE completo (ngspice)
* Practical case: Production Line Fault Monitoring
* --- Component Models ---
* Generic Red LED Model
.model DLED D (IS=1e-14 N=2 RS=10 BV=5 IBV=10u CJO=10p)
* --- Subcircuits ---
* 74HC32 Quad 2-input OR Gate
* Pinout: 1=InputA, 2=InputB, 3=Output, 7=GND, 14=VCC
* Implemented using a robust behavioral source with continuous functions
.subckt 74HC32 1 2 3 7 14
* Logic: Output = VCC if (A > 2.5V OR B > 2.5V)
* Using sigmoid function for smooth convergence: S(x) = 1/(1+exp(-k*(x-thresh)))
* max(V(1), V(2)) selects the higher voltage to compare against threshold (2.5V)
B_OR 3 7 V = V(14) * (1 / (1 + exp(-20 * (max(V(1), V(2)) - 2.5))))
.ends
* --- Main Power Supply ---
* V1: 5V DC Supply
* Wiring: Positive -> Node 14 (VCC), Negative -> Node 0 (GND)
V1 14 0 DC 5
* --- Input Sensors (Simulated Switches) ---
* S1: Temperature Sensor Switch
* Wiring: Connects VCC to VA (Pin 1). Modeled as Pulse Source to simulate toggling.
* Logic Sequence: High (Overheat) / Low (Normal)
VS1 VA 0 PULSE(0 5 0 1u 1u 200u 400u)
* S2: Jam Sensor Switch
* Wiring: Connects VCC to VB (Pin 2). Modeled as Pulse Source with faster period.
* ... (truncated in public view) ...Copia este contenido en un archivo .cir y ejecútalo con ngspice.
* Practical case: Production Line Fault Monitoring
* --- Component Models ---
* Generic Red LED Model
.model DLED D (IS=1e-14 N=2 RS=10 BV=5 IBV=10u CJO=10p)
* --- Subcircuits ---
* 74HC32 Quad 2-input OR Gate
* Pinout: 1=InputA, 2=InputB, 3=Output, 7=GND, 14=VCC
* Implemented using a robust behavioral source with continuous functions
.subckt 74HC32 1 2 3 7 14
* Logic: Output = VCC if (A > 2.5V OR B > 2.5V)
* Using sigmoid function for smooth convergence: S(x) = 1/(1+exp(-k*(x-thresh)))
* max(V(1), V(2)) selects the higher voltage to compare against threshold (2.5V)
B_OR 3 7 V = V(14) * (1 / (1 + exp(-20 * (max(V(1), V(2)) - 2.5))))
.ends
* --- Main Power Supply ---
* V1: 5V DC Supply
* Wiring: Positive -> Node 14 (VCC), Negative -> Node 0 (GND)
V1 14 0 DC 5
* --- Input Sensors (Simulated Switches) ---
* S1: Temperature Sensor Switch
* Wiring: Connects VCC to VA (Pin 1). Modeled as Pulse Source to simulate toggling.
* Logic Sequence: High (Overheat) / Low (Normal)
VS1 VA 0 PULSE(0 5 0 1u 1u 200u 400u)
* S2: Jam Sensor Switch
* Wiring: Connects VCC to VB (Pin 2). Modeled as Pulse Source with faster period.
* Logic Sequence: High (Jam) / Low (Clear)
VS2 VB 0 PULSE(0 5 0 1u 1u 100u 200u)
* --- Pull-down Resistors ---
* R1: 10k Pull-down for Temp Input
R1 VA 0 10k
* R2: 10k Pull-down for Jam Input
R2 VB 0 10k
* --- Logic IC U1 ---
* U1: 74HC32 Quad OR Gate
* Connections per wiring guide:
* Pin 1 (A) -> VA
* Pin 2 (B) -> VB
* Pin 3 (Y) -> V_OUT
* Pin 7 (GND) -> 0
* Pin 14 (VCC) -> 14
XU1 VA VB V_OUT 0 14 74HC32
* --- Output Indicator ---
* R3: 330 Ohm Current Limiting Resistor
R3 V_OUT LED_NODE 330
* D1: Red LED Visual Indicator
* Anode -> LED_NODE, Cathode -> GND
D1 LED_NODE 0 DLED
* --- Analysis Directives ---
* Transient analysis to capture truth table states (00, 01, 10, 11)
.tran 1u 400u
* Print required voltages for verification
.print tran V(VA) V(VB) V(V_OUT) V(LED_NODE)
* Calculate DC operating point
.op
.endResultados de Simulación (Transitorio)

Show raw data table (906 rows)
Index time v(va) v(vb) v(v_out) 0 0.000000e+00 0.000000e+00 0.000000e+00 9.643749e-22 1 1.000000e-08 5.000000e-02 5.000000e-02 1.928750e-21 2 2.000000e-08 1.000000e-01 1.000000e-01 5.242886e-21 3 4.000000e-08 2.000000e-01 2.000000e-01 2.137746e-20 4 8.000000e-08 4.000000e-01 4.000000e-01 2.632654e-19 5 1.600000e-07 8.000000e-01 8.000000e-01 2.587285e-17 6 3.200000e-07 1.600000e+00 1.600000e+00 7.614990e-08 7 4.700575e-07 2.350288e+00 2.350288e+00 2.384318e-01 8 6.126008e-07 3.063004e+00 3.063004e+00 4.999936e+00 9 7.041960e-07 3.520980e+00 3.520980e+00 5.000000e+00 10 7.932149e-07 3.966074e+00 3.966074e+00 5.000000e+00 11 9.007723e-07 4.503862e+00 4.503862e+00 5.000000e+00 12 1.000000e-06 5.000000e+00 5.000000e+00 5.000000e+00 13 1.021511e-06 5.000000e+00 5.000000e+00 5.000000e+00 14 1.064534e-06 5.000000e+00 5.000000e+00 5.000000e+00 15 1.150580e-06 5.000000e+00 5.000000e+00 5.000000e+00 16 1.322672e-06 5.000000e+00 5.000000e+00 5.000000e+00 17 1.666856e-06 5.000000e+00 5.000000e+00 5.000000e+00 18 2.355224e-06 5.000000e+00 5.000000e+00 5.000000e+00 19 3.355224e-06 5.000000e+00 5.000000e+00 5.000000e+00 20 4.355224e-06 5.000000e+00 5.000000e+00 5.000000e+00 21 5.355224e-06 5.000000e+00 5.000000e+00 5.000000e+00 22 6.355224e-06 5.000000e+00 5.000000e+00 5.000000e+00 23 7.355224e-06 5.000000e+00 5.000000e+00 5.000000e+00 ... (882 more rows) ...
Errores comunes y cómo evitarlos
- Dejar entradas flotantes: No instalar las resistencias pull-down (R1, R2) provoca que las entradas «floten» y capten ruido, causando que el LED parpadee o permanezca ENCENDIDO aleatoriamente. Solución: Utilice siempre resistencias pull-down de 10 kΩ en las entradas CMOS conectadas a interruptores.
- Falta de resistencia limitadora de corriente: Conectar el LED directamente al pin de salida del 74HC32 sin R3. Solución: Asegúrese de que R3 (330 Ω) esté en serie con el LED para evitar quemar el CI o el LED.
- Confundir el pinout: Tratar el 74HC32 como un chip lógico diferente (ej. 74HC02 NOR) debido a la forma similar del encapsulado. Solución: Verifique siempre el diagrama de pines en la hoja de datos; el Pin 3 es la salida para la primera puerta en el 74HC32.
Solución de problemas
- El LED está siempre ENCENDIDO: Verifique si las resistencias pull-down R1 y R2 están conectadas a Tierra. Si las entradas están desconectadas, flotan en Alto.
- El LED es muy tenue: La resistencia R3 podría ser demasiado alta (ej. 10 kΩ en lugar de 330 Ω) o el voltaje de la fuente de alimentación está por debajo de 3 V.
- No sucede nada cuando los interruptores se cierran: Verifique que el Pin 14 de U1 esté conectado a 5 V y el Pin 7 esté conectado a GND. Compruebe la continuidad de los interruptores.
- La lógica está invertida (LED APAGADO cuando ocurre una falla): Es posible que haya utilizado accidentalmente una puerta NOR o haya cableado el LED activo en bajo (Ánodo a VCC, Cátodo a Salida).
Posibles mejoras y extensiones
- Alarma con enclavamiento: Añada un Flip-Flop SR o un bucle de retroalimentación para que, una vez detectada una falla, la alarma permanezca ENCENDIDA hasta que se presione un botón de «Reinicio» manual, incluso si el sensor vuelve a la normalidad.
- Alerta audible: Conecte un controlador de transistor y un zumbador activo de 5 V en paralelo con el LED para proporcionar una advertencia sonora en entornos de fábrica ruidosos.
Más Casos Prácticos en Prometeo.blog
Encuentra este producto y/o libros sobre este tema en Amazon
Como afiliado de Amazon, gano con las compras que cumplan los requisitos. Si compras a través de este enlace, ayudas a mantener este proyecto.
Quiz rápido

Ingeniero Superior en Electrónica de Telecomunicaciones e Ingeniero en Informática (titulaciones oficiales en España).