Nivel: Medio | Construye un circuito de relé accionado por transistor para controlar automáticamente una bomba de agua usando un interruptor de flotador.
Objetivo y caso de uso
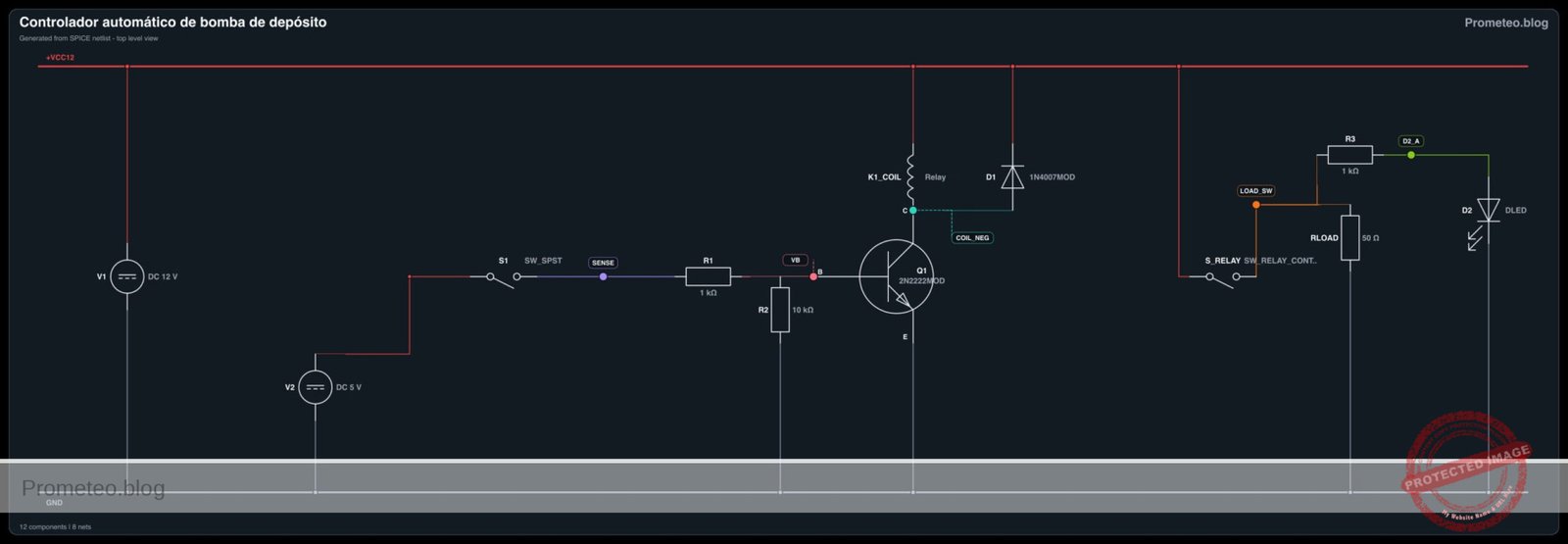
En este caso práctico, construirás un controlador automático de bomba de depósito. El circuito utiliza un interruptor de flotador mecánico para activar un transistor NPN, el cual energiza un relé electromecánico para accionar una bomba de CC de alta corriente (simulada aquí como una carga resistiva) y un LED de estado.
Por qué es útil:
* Automatiza la gestión del nivel de agua en tanques, depósitos y sumideros.
* Aísla de forma segura los circuitos de control de bajo voltaje de las cargas de alta potencia.
* Demuestra la interconexión práctica de sensores mecánicos simples con electrónica de potencia.
* Previene condiciones de desbordamiento o funcionamiento en seco en entornos industriales y agrícolas.
Resultado esperado:
* Al cerrar el interruptor de flotador se aplica un voltaje a la base del transistor, encendiéndolo (saturación).
* El transistor absorbe corriente para la bobina del relé, energizándola y cerrando su contacto normalmente abierto (NO).
* La bomba de CC simulada (resistencia de carga) recibe todo el voltaje de alimentación.
* El LED indicador de estado se ilumina cuando la bomba está activa.
* Al soltar el interruptor se desenergiza el relé, y el diodo flyback disipa de forma segura el pico de voltaje inductivo de la bobina.
Público objetivo: Estudiantes de electrónica de nivel intermedio que aprenden sobre conmutación de transistores, relés electromecánicos y protección de cargas inductivas.
Materiales
- V1: fuente de alimentación de 12 V CC, función: alimentación principal para la bobina del relé y la bomba
- V2: fuente de alimentación de 5 V CC, función: alimentación lógica de control para el interruptor de flotador
- SW1: interruptor SPST, función: interruptor de flotador simulado o sensor de nivel alto
- R1: resistencia de 1 kΩ, función: limitación de corriente de base del transistor
- R2: resistencia de 10 kΩ, función: pull-down para la base del transistor para asegurar el apagado
- R3: resistencia de 1 kΩ, función: limitación de corriente del LED
- RLOAD: resistencia de alta potencia de 50 Ω, función: carga de bomba de CC simulada
- Q1: transistor NPN 2N2222, función: controlador de la bobina del relé
- D1: diodo 1N4007, función: protección flyback para la bobina del relé
- D2: LED verde, función: indicador de estado de la bomba
- K1: relé SPDT de 12 V, función: interruptor electromecánico para la bomba
Guía de conexionado
- V1 se conecta entre el nodo VCC12 y el nodo 0.
- V2 se conecta entre el nodo VCC5 y el nodo 0.
- SW1 se conecta entre el nodo VCC5 y el nodo SENSE.
- R1 se conecta entre el nodo SENSE y el nodo VB.
- R2 se conecta entre el nodo VB y el nodo 0.
- La base de Q1 se conecta al nodo VB, el emisor se conecta al nodo 0, y el colector se conecta al nodo COIL_NEG.
- La bobina de K1 se conecta entre el nodo VCC12 y el nodo COIL_NEG.
- El contacto COM (Común) de K1 se conecta al nodo VCC12.
- El contacto NO (Normalmente Abierto) de K1 se conecta al nodo LOAD_SW.
- El cátodo de D1 se conecta al nodo VCC12 y el ánodo se conecta al nodo COIL_NEG (colocado en antiparalelo a la bobina del relé).
- RLOAD se conecta entre el nodo LOAD_SW y el nodo 0.
- R3 se conecta entre el nodo LOAD_SW y el ánodo de D2.
- El cátodo de D2 se conecta al nodo 0.
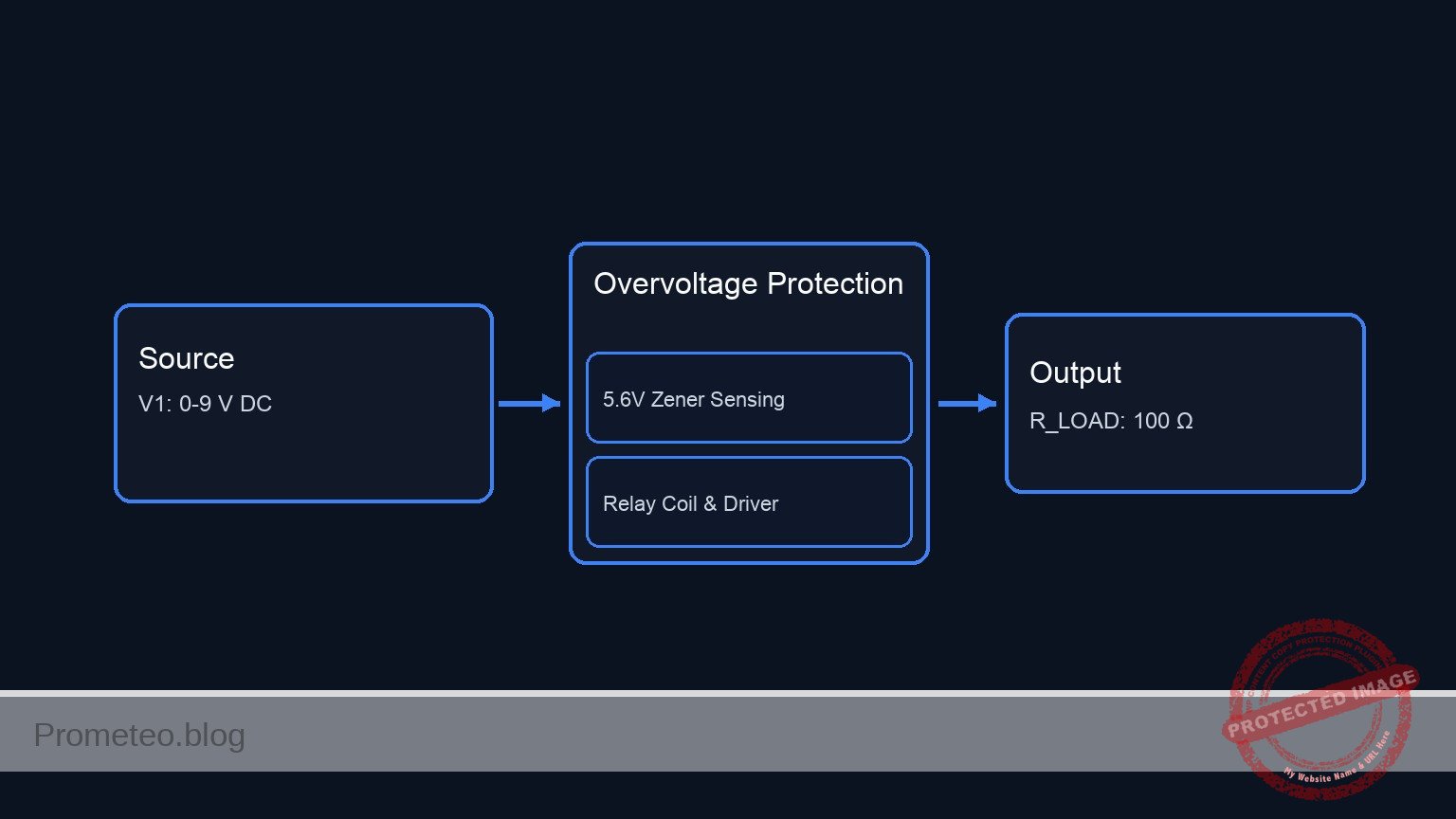
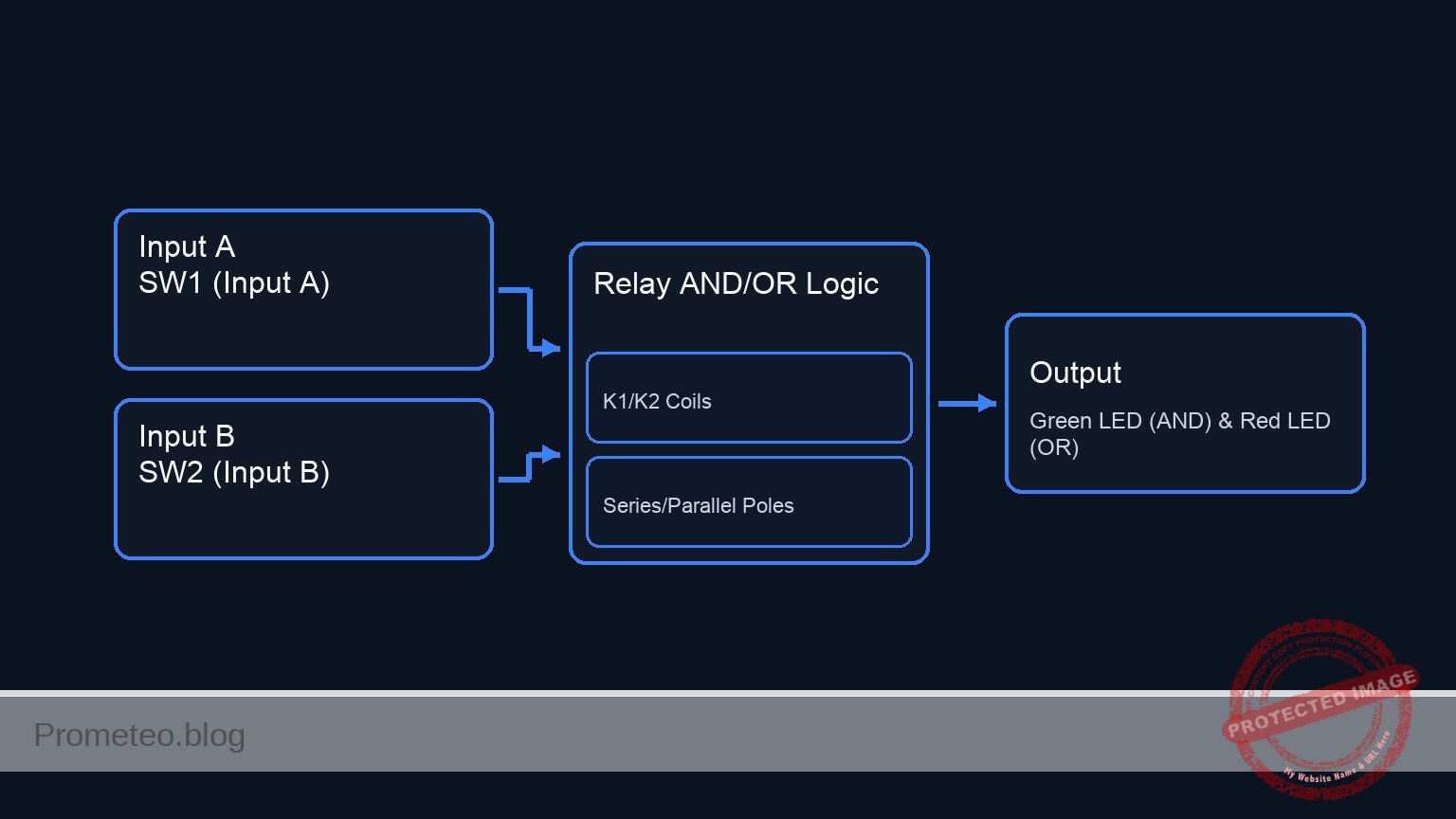
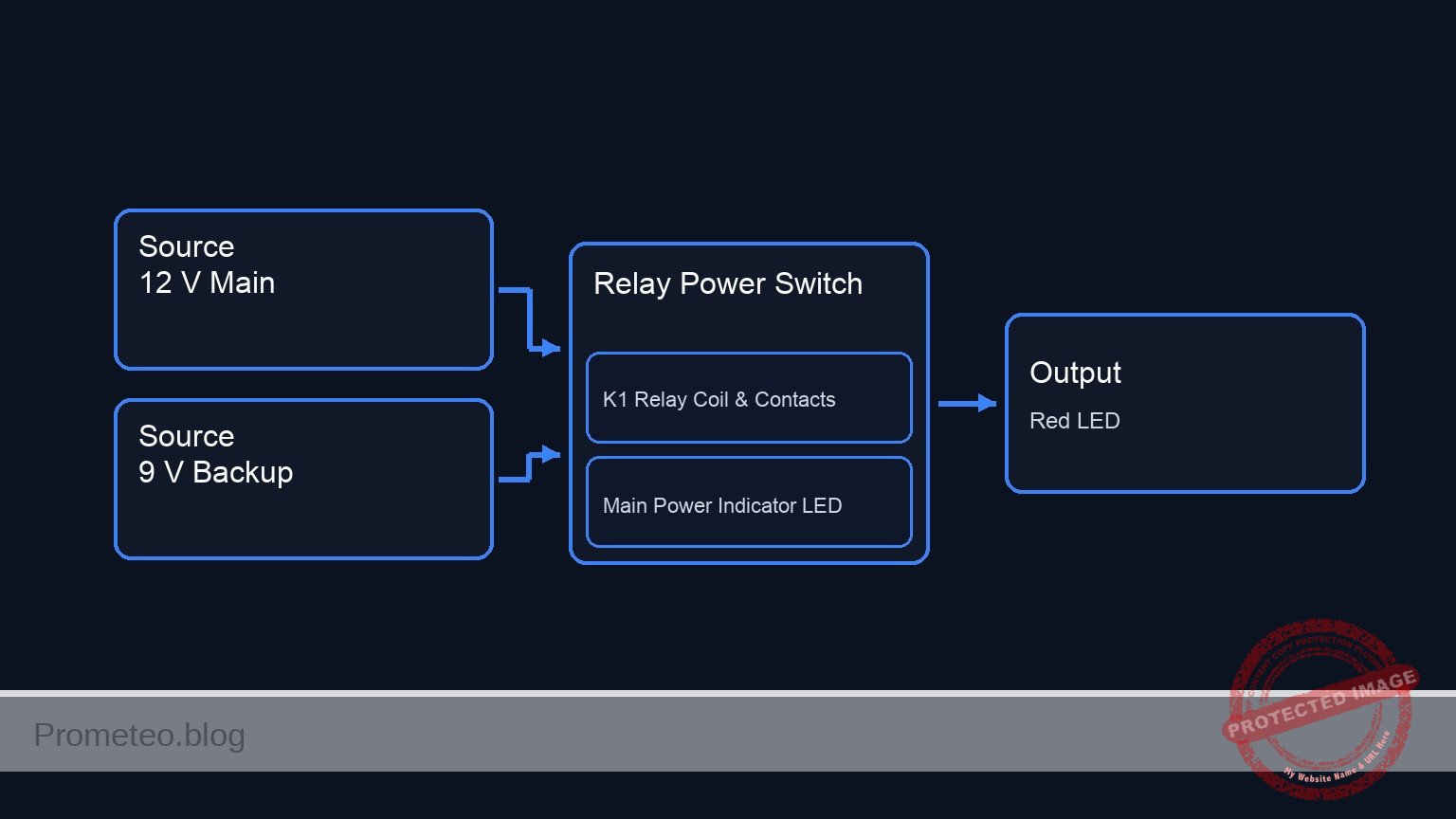
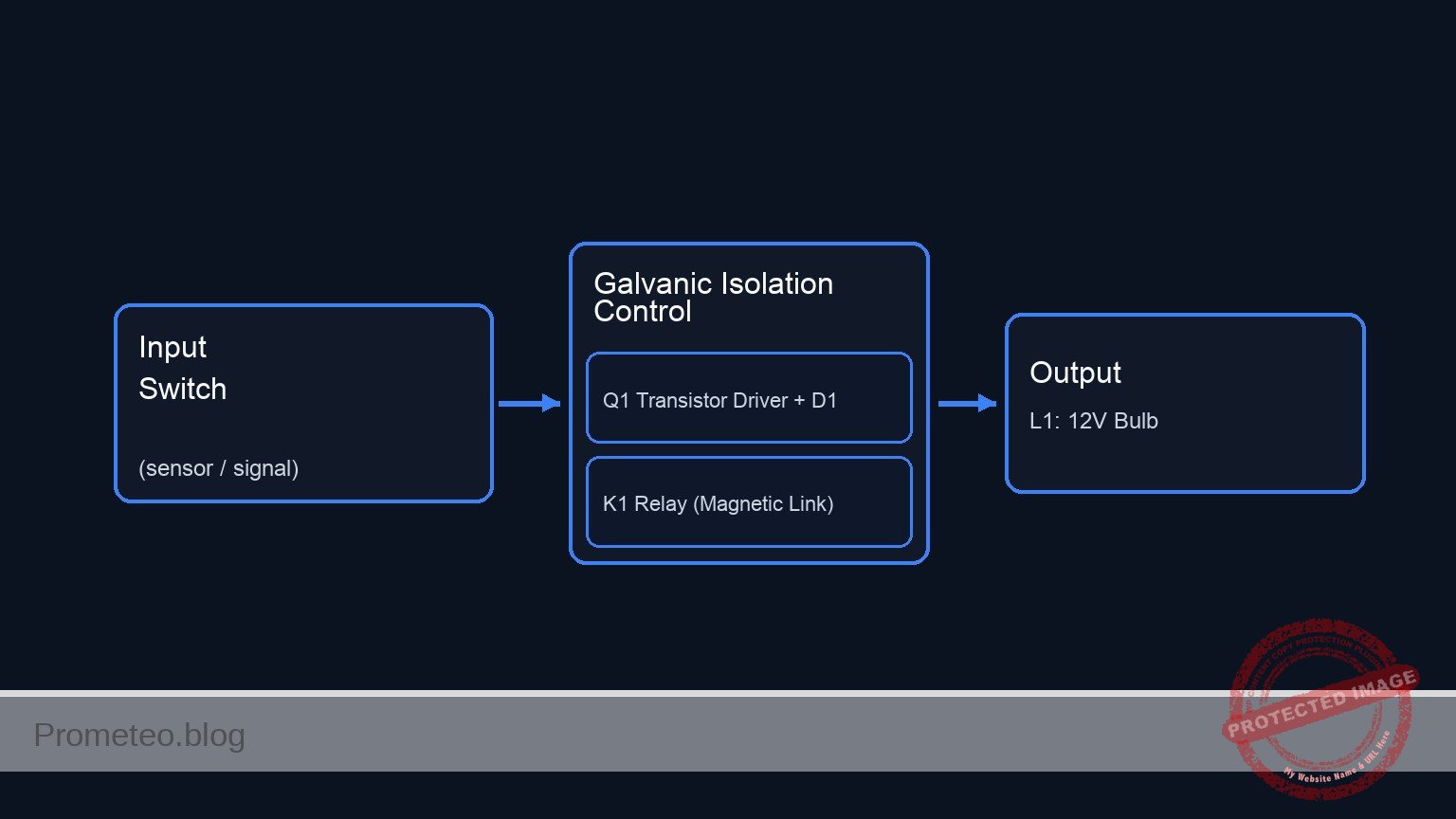
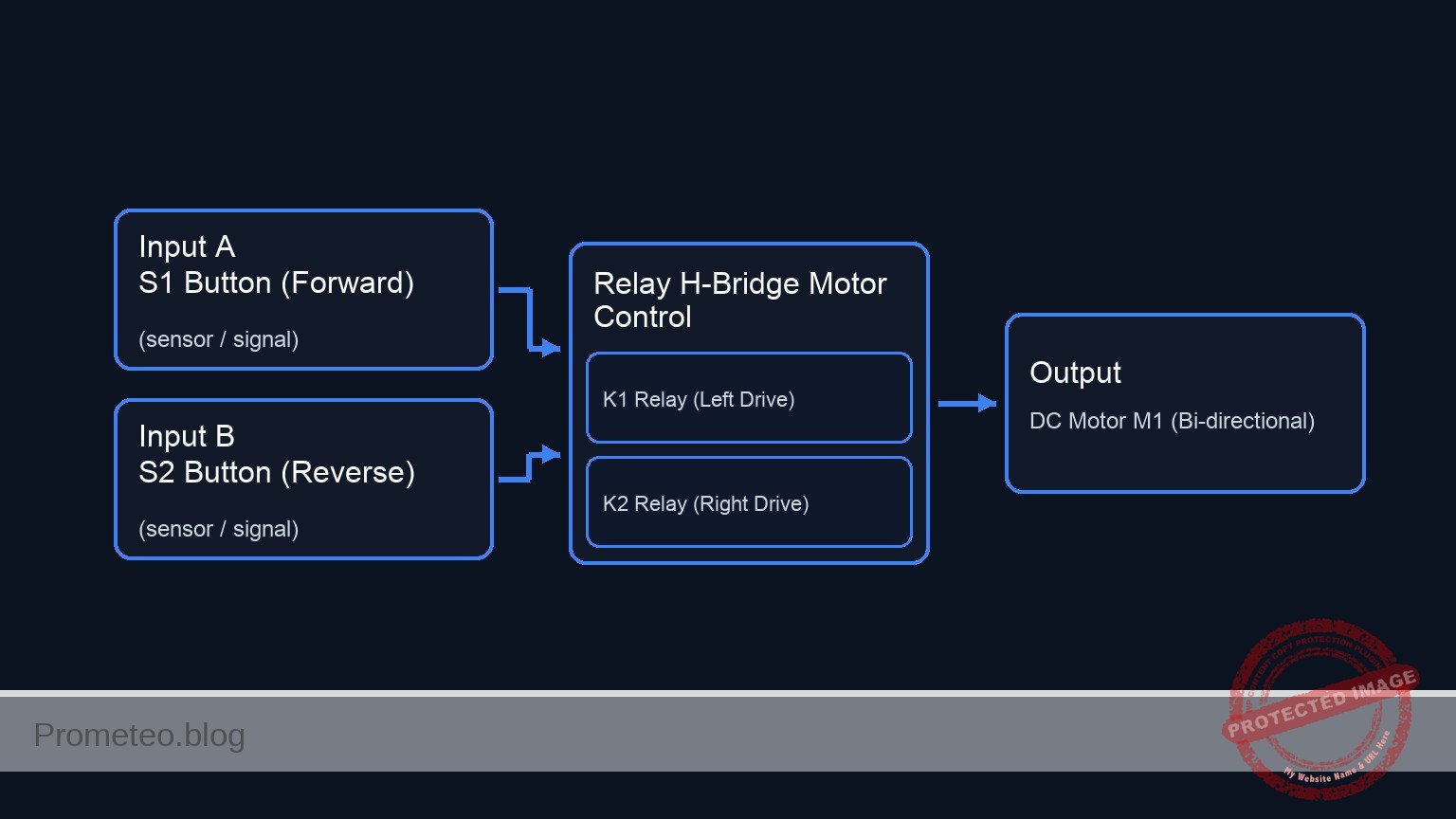
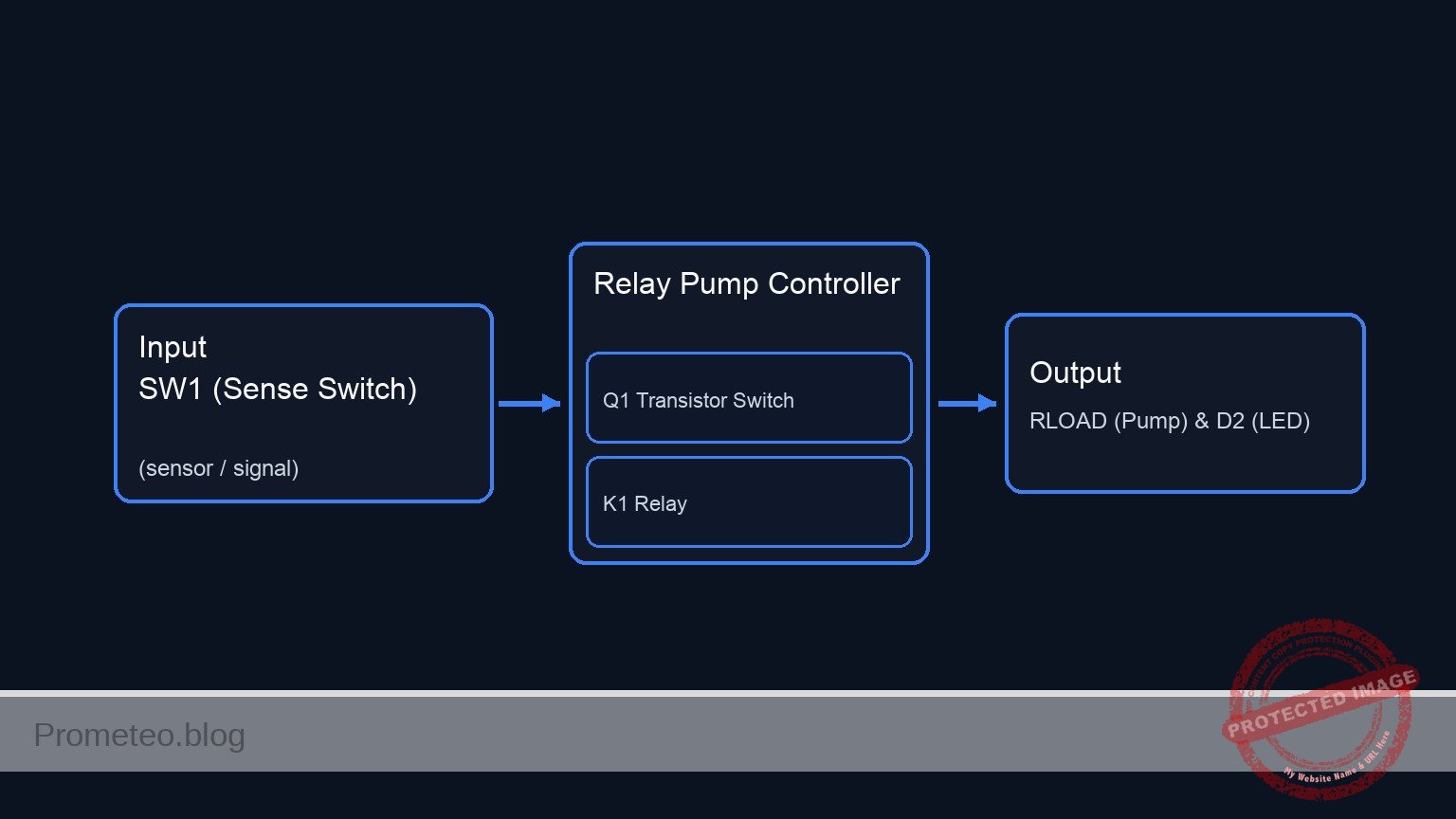
Diagrama de bloques conceptual
Esquemático
VCC5 --> [ SW1 ] --(SENSE)--> [ R1 ] --(VB)--> [ Q1:B ]
| |
[ R2 ] |
| |
GND |
|
VCC12 --> [ K1 Coil || D1(Rev) ] --(COIL_NEG)--> [ Q1:C ] --( )-- [ Q1:E ] --> GND
|
(Magnetic Link)
v
VCC12 --> [ K1 Switch (COM->NO) ] --(LOAD_SW)--> [ RLOAD (Pump) ] --> GND
|
+------> [ R3 ] --> [ D2 (LED) ] --> GND
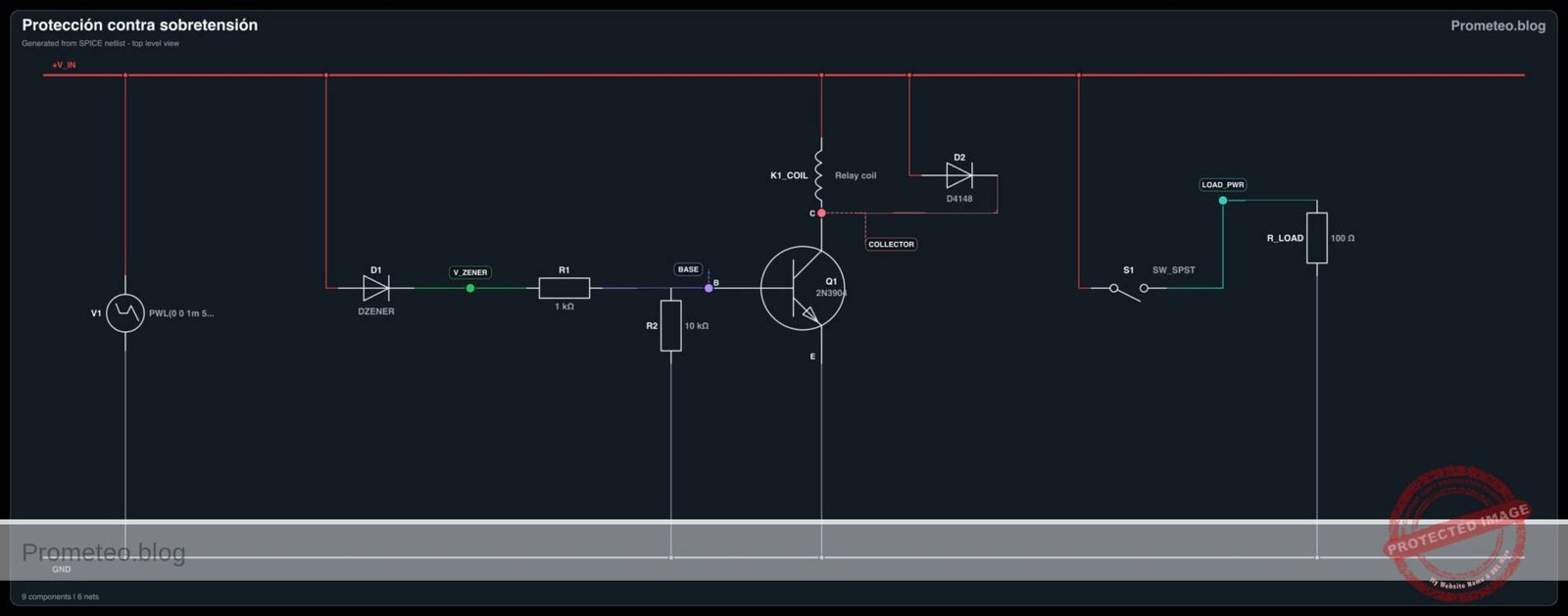
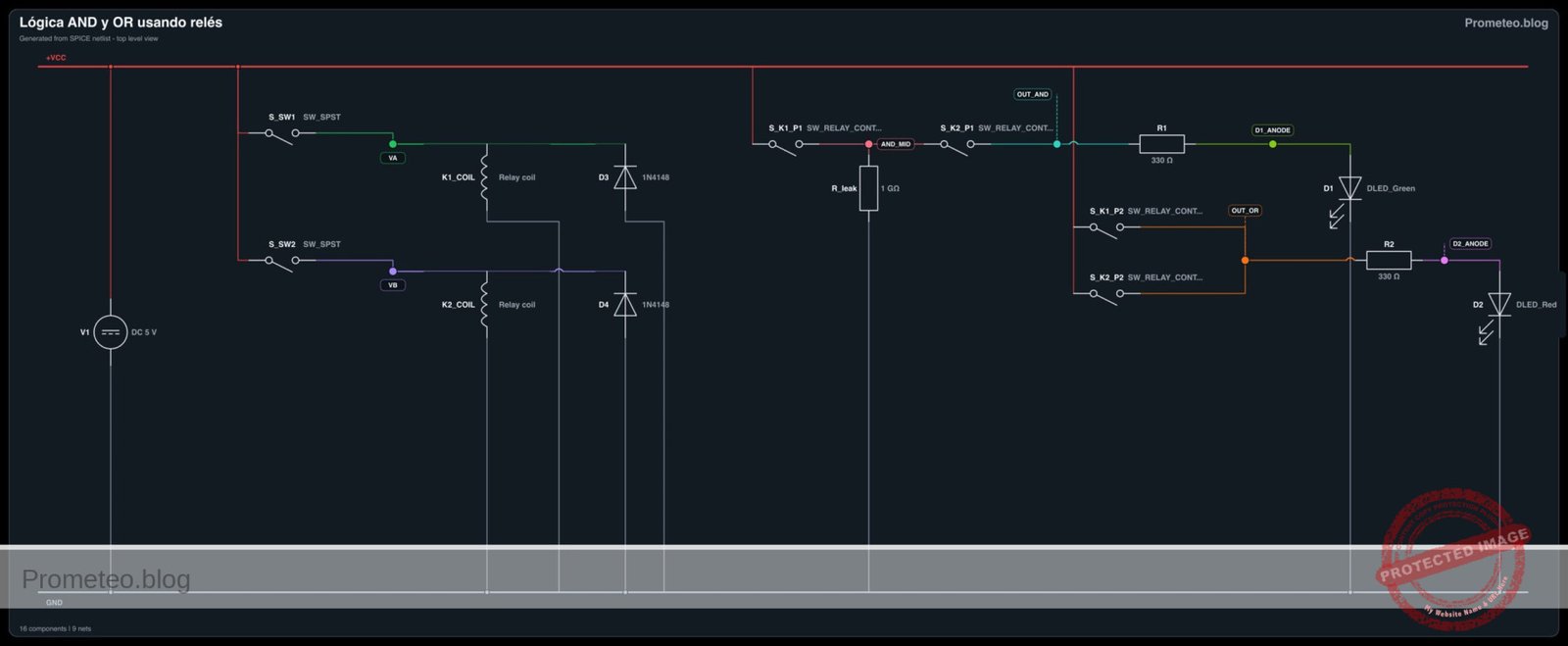
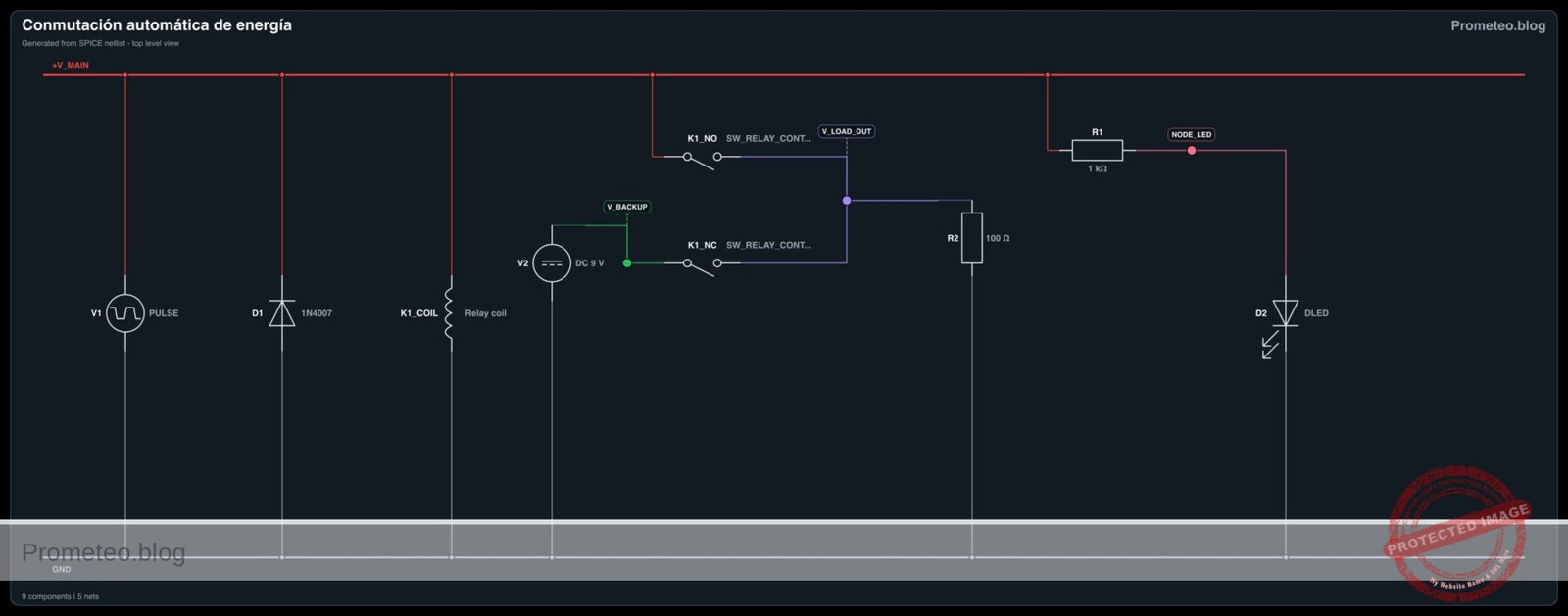
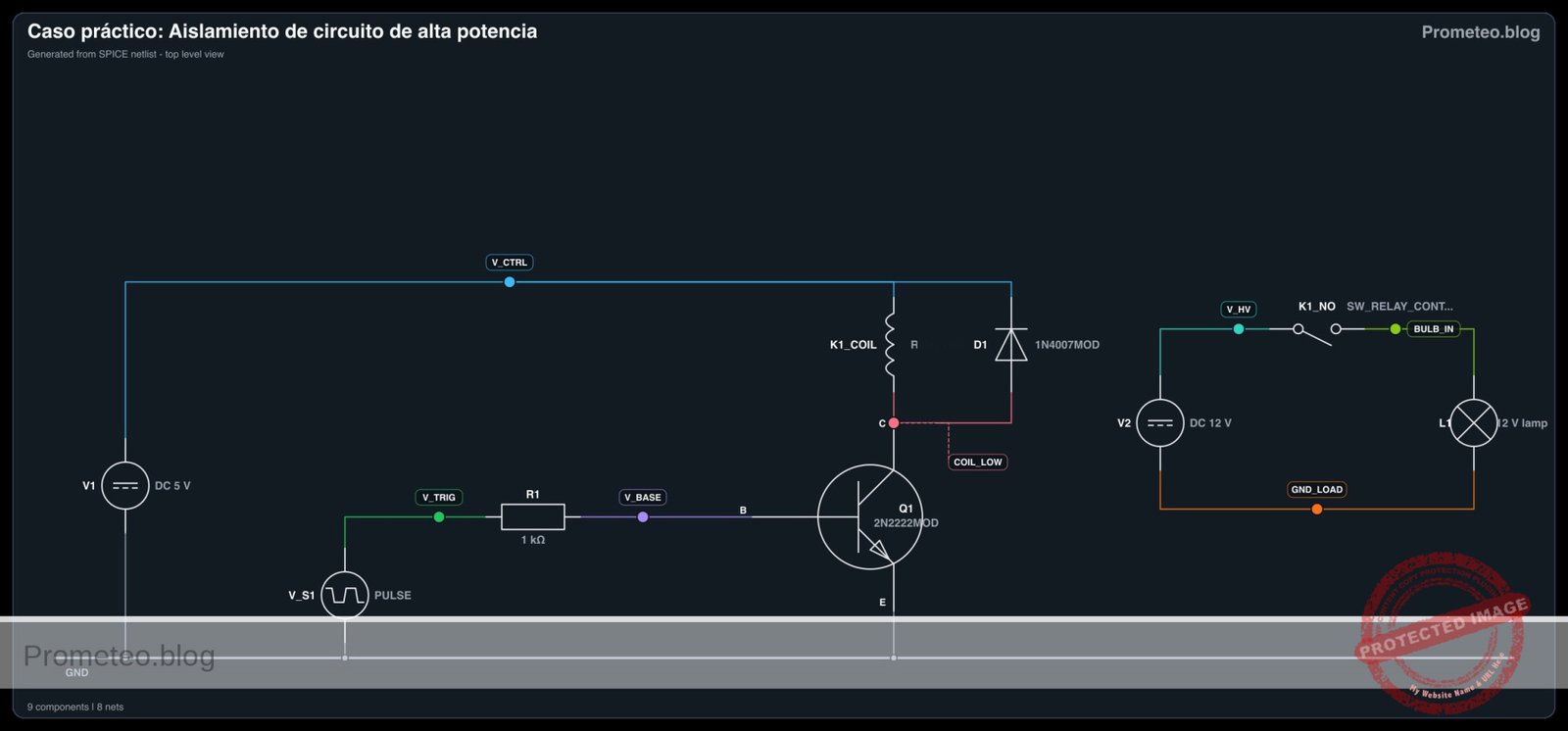
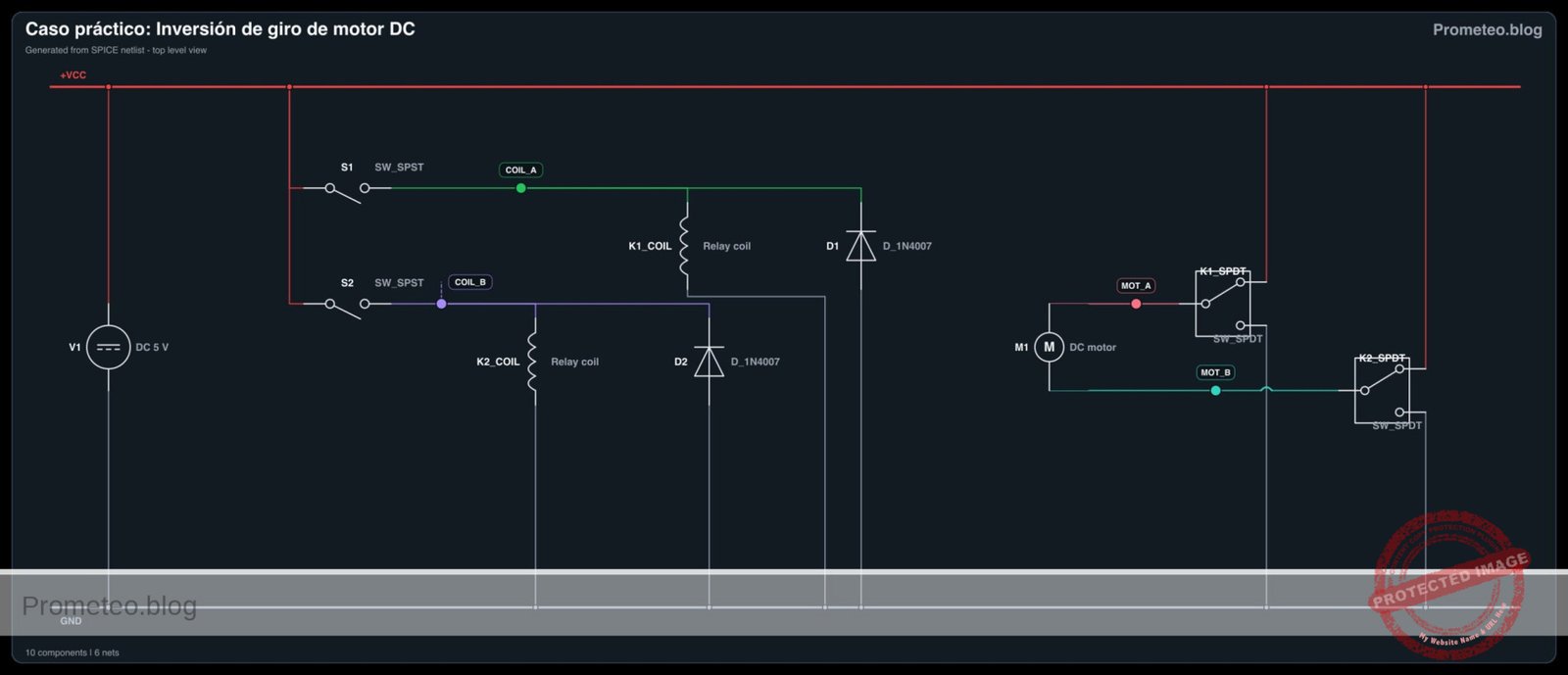
Diagrama eléctrico
Mediciones y pruebas
- Prueba de lógica de control: Con SW1 abierto, mide el voltaje en el nodo SENSE. Debería ser 0 V. Cierra SW1 y verifica que el voltaje suba a 5 V.
- Verificación del control de base: Mide el voltaje en el nodo VB con SW1 cerrado. Debería marcar aproximadamente 0.7 V, confirmando que la unión base-emisor de Q1 está polarizada en directa.
- Verificación de conmutación de la bobina: Mide el nodo COIL_NEG. Cuando SW1 esté abierto, debería medir 12 V. Cuando SW1 esté cerrado, debería caer a casi 0 V (Vce_sat del transistor), confirmando que la bobina está energizada.
- Prueba de entrega a la carga: Mide el voltaje en el nodo LOAD_SW. Verifica que marque 0 V cuando el relé esté apagado, y que salte a 12 V cuando el relé se active (haga clic). Comprueba que RLOAD consume corriente y D2 se ilumina.
Netlist SPICE y simulación
Netlist SPICE de referencia (ngspice) — extractoNetlist SPICE completo (ngspice)
* Automatic Reservoir Pump Controller
.width out=256
* Power Supplies
V1 VCC12 0 DC 12
V2 VCC5 0 DC 5
* Simulated Float Switch (SW1)
* Using a voltage-controlled switch and a pulse source to simulate a user/sensor triggering the switch
V_SW_CTRL SW_CTRL 0 PULSE(0 5 50u 1u 1u 200u 500u)
S1 VCC5 SENSE SW_CTRL 0 myswitch
* Base driving circuit
R1 SENSE VB 1k
R2 VB 0 10k
* Relay Driver Transistor
Q1 COIL_NEG VB 0 2N2222MOD
* Relay Coil (K1)
* ... (truncated in public view) ...Copia este contenido en un archivo .cir y ejecútalo con ngspice.
* Automatic Reservoir Pump Controller
.width out=256
* Power Supplies
V1 VCC12 0 DC 12
V2 VCC5 0 DC 5
* Simulated Float Switch (SW1)
* Using a voltage-controlled switch and a pulse source to simulate a user/sensor triggering the switch
V_SW_CTRL SW_CTRL 0 PULSE(0 5 50u 1u 1u 200u 500u)
S1 VCC5 SENSE SW_CTRL 0 myswitch
* Base driving circuit
R1 SENSE VB 1k
R2 VB 0 10k
* Relay Driver Transistor
Q1 COIL_NEG VB 0 2N2222MOD
* Relay Coil (K1)
* Modeled as a series resistor and inductor
R_K1 VCC12 K1_COIL_INT 400
L_K1 K1_COIL_INT COIL_NEG 10mH
* Flyback Diode
D1 COIL_NEG VCC12 1N4007MOD
* Relay Contacts (K1 NO)
* The switch closes when the voltage across the coil (VCC12 - COIL_NEG) exceeds 8V
S_RELAY VCC12 LOAD_SW VCC12 COIL_NEG relay_sw
* Simulated Pump Load
RLOAD LOAD_SW 0 50
* Status LED
R3 LOAD_SW D2_A 1k
D2 D2_A 0 DLED
* Models
.model myswitch SW(vt=2.5 vh=0.5 ron=0.1 roff=10MEG)
.model relay_sw SW(vt=8 vh=1 ron=0.05 roff=100MEG)
.model 2N2222MOD NPN(IS=1E-14 VAF=100 BF=200 IKF=0.3 XTB=1.5 BR=3 CJC=8E-12 CJE=25E-12 TR=100E-9 TF=400E-12 ITF=1 VTF=2 XTF=3 RB=10)
.model 1N4007MOD D(IS=7.02767n RS=0.0341512 N=1.80803 EG=1.11 XTI=3.0 BV=1000 IBV=5e-08 CJO=1e-11 VJ=0.7 M=0.5 FC=0.5 TT=1e-07)
.model DLED D(IS=1e-20 N=2.2 RS=2.5 BV=5 IBV=10u CJO=50p)
* Analysis Commands
.op
.tran 1u 500u
.print tran V(SENSE) V(LOAD_SW) V(COIL_NEG) V(VB) I(L_K1)
.endResultados de Simulación (Transitorio)

Show raw data table (961 rows)
Index time v(sense) v(load_sw) v(coil_neg) v(vb) l_k1#branch 0 0.000000e+00 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.403801e-11 1 1.000000e-08 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.403803e-11 2 2.000000e-08 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.403801e-11 3 4.000000e-08 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.403795e-11 4 8.000000e-08 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.403772e-11 5 1.600000e-07 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.403654e-11 6 3.200000e-07 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.403033e-11 7 6.400000e-07 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.400598e-11 8 1.280000e-06 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.398528e-11 9 2.280000e-06 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.403534e-11 10 3.280000e-06 5.494077e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.401174e-11 11 4.280000e-06 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.394780e-11 12 5.280000e-06 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.402136e-11 13 6.280000e-06 5.494077e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.408634e-11 14 7.280000e-06 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.401469e-11 15 8.280000e-06 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.399217e-11 16 9.280000e-06 5.494077e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.399919e-11 17 1.028000e-05 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.393646e-11 18 1.128000e-05 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.397704e-11 19 1.228000e-05 5.494077e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.408121e-11 20 1.328000e-05 5.494077e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.402567e-11 21 1.428000e-05 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.395460e-11 22 1.528000e-05 5.494076e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.400449e-11 23 1.628000e-05 5.494077e-03 5.999997e-06 1.200000e+01 4.994626e-03 2.399821e-11 ... (937 more rows) ...
Netlist SPICE de referencia (ngspice)
* Automatic Reservoir Pump Controller
.width out=256
* Power Supplies
V1 VCC12 0 DC 12
V2 VCC5 0 DC 5
* Simulated Float Switch (SW1)
* Using a voltage-controlled switch and a pulse source to simulate a user/sensor triggering the switch
V_SW_CTRL SW_CTRL 0 PULSE(0 5 50u 1u 1u 200u 500u)
S1 VCC5 SENSE SW_CTRL 0 myswitch
* Base driving circuit
R1 SENSE VB 1k
R2 VB 0 10k
* Relay Driver Transistor
Q1 COIL_NEG VB 0 2N2222MOD
* Relay Coil (K1)
* Modeled as a series resistor and inductor
R_K1 VCC12 K1_COIL_INT 400
L_K1 K1_COIL_INT COIL_NEG 10mH
* Flyback Diode
D1 COIL_NEG VCC12 1N4007MOD
* Relay Contacts (K1 NO)
* The switch closes when the voltage across the coil (VCC12 - COIL_NEG) exceeds 8V
S_RELAY VCC12 LOAD_SW VCC12 COIL_NEG relay_sw
* Simulated Pump Load
RLOAD LOAD_SW 0 50
* Status LED
R3 LOAD_SW D2_A 1k
D2 D2_A 0 DLED
* Models
.model myswitch SW(vt=2.5 vh=0.5 ron=0.1 roff=10MEG)
.model relay_sw SW(vt=8 vh=1 ron=0.05 roff=100MEG)
.model 2N2222MOD NPN(IS=1E-14 VAF=100 BF=200 IKF=0.3 XTB=1.5 BR=3 CJC=8E-12 CJE=25E-12 TR=100E-9 TF=400E-12 ITF=1 VTF=2 XTF=3 RB=10)
.model 1N4007MOD D(IS=7.02767n RS=0.0341512 N=1.80803 EG=1.11 XTI=3.0 BV=1000 IBV=5e-08 CJO=1e-11 VJ=0.7 M=0.5 FC=0.5 TT=1e-07)
.model DLED D(IS=1e-20 N=2.2 RS=2.5 BV=5 IBV=10u CJO=50p)
* Analysis Commands
.op
.tran 1u 500u
.print tran V(SENSE) V(LOAD_SW) V(COIL_NEG) V(VB) I(L_K1)
.endResultados de Simulación (Transitorio)
Errores comunes y cómo evitarlos
- Falta del diodo flyback (D1): Cuando el relé se apaga, el colapso del campo magnético en la bobina genera un pico de voltaje masivo. Sin D1 para proporcionar un camino de descarga seguro, este pico destruirá instantáneamente Q1. Coloca siempre D1 polarizado en inversa a través de la bobina.
- Corriente de base insuficiente: Si R1 es demasiado grande, Q1 operará en su región lineal en lugar de saturarse completamente. Esto hará que el transistor se sobrecaliente y es posible que el relé no se accione de manera confiable. Asegúrate siempre de que R1 proporcione suficiente corriente de base (Ib) para la corriente de colector (Ic) requerida.
- Contactos del relé subdimensionados: Los motores y bombas consumen una enorme corriente de «irrupción» (inrush) al arrancar. Usar un relé clasificado exactamente para la corriente de funcionamiento hará que los contactos se suelden o se quemen. Selecciona siempre un relé clasificado para al menos 2-3 veces la corriente continua de la carga.
Solución de problemas
- Síntoma: El relé castañetea o zumba rápidamente en lugar de enclavarse limpiamente.
- Causa: La fuente de alimentación de 12 V es demasiado débil y el voltaje cae bajo la gran carga de la bomba, haciendo que la bobina del relé pierda fuerza de retención, desconecte la carga, se recupere y repita el ciclo.
- Solución: Usa una fuente de alimentación de banco con mayor capacidad de corriente o prueba con una batería.
- Síntoma: El transistor Q1 se calienta extremadamente y falla.
- Causa: Falta el diodo flyback, o la demanda de corriente de la bobina del relé excede la corriente máxima de colector del 2N2222.
- Solución: Verifica que D1 esté instalado correctamente. Comprueba la resistencia de la bobina del relé; asegúrate de que consuma menos de 600 mA.
- Síntoma: El circuito se enciende aleatoriamente sin la acción del interruptor de flotador.
- Causa: La base de Q1 está flotando, captando interferencias electromagnéticas ambientales.
- Solución: Asegúrate de que la resistencia pull-down R2 esté conectada de forma segura entre el nodo VB y tierra.
- Síntoma: El LED se enciende, pero la bomba simulada (RLOAD) no funciona.
- Causa: Conexión rota en el contacto NO del relé o una resistencia de carga quemada.
- Solución: Comprueba el cableado entre el pin NO del relé y LOAD_SW. Verifica la resistencia de RLOAD con un multímetro.
Posibles mejoras y extensiones
- Corte por nivel bajo de agua (Lógica de enclavamiento): Agrega un segundo interruptor de flotador y configura el relé como un circuito de enclavamiento. Esto asegura que la bomba funcione continuamente hasta que el tanque esté completamente lleno, en lugar de hacer ciclos cortos.
- Red de retardo antirrebote: Las ondas de agua en un tanque pueden hacer que el interruptor de flotador rebote rápidamente encendiéndose y apagándose. Agrega una red de retardo RC (un condensador y una resistencia) en la base del transistor, o usa un temporizador 555, para introducir un retardo de encendido/apagado y proteger la bomba.
Más Casos Prácticos en Prometeo.blog
Encuentra este producto y/o libros sobre este tema en Amazon
Como afiliado de Amazon, gano con las compras que cumplan los requisitos. Si compras a través de este enlace, ayudas a mantener este proyecto.
Quiz rápido

Ingeniero Superior en Electrónica de Telecomunicaciones e Ingeniero en Informática (titulaciones oficiales en España).