Nivel: Medio – Construye un receptor capaz de demodular una señal de audio transmitida a través de un haz de luz LED utilizando un fotodiodo.
Objetivo y caso de uso
En este caso práctico, construirás un receptor óptico analógico utilizando un fotodiodo de alta velocidad configurado en modo fotoconductivo, seguido de un Amplificador de Transimpedancia (TIA) y un amplificador de potencia de audio. Este circuito detecta cambios en la intensidad de la luz modulados por una fuente de audio y los convierte de nuevo en señales eléctricas para excitar un altavoz.
Por qué es útil:
* Comunicaciones Ópticas Inalámbricas (OWC): Demuestra la física fundamental detrás del Li-Fi y los controles remotos infrarrojos.
* Aislamiento galvánico: Permite la transmisión de audio entre dispositivos sin una conexión física a tierra, evitando bucles de tierra.
* Seguridad: A diferencia de la radiofrecuencia (RF), las señales ópticas se confinan en la habitación y no pueden atravesar paredes opacas.
* Inmunidad a interferencias: Inmune a la interferencia electromagnética (EMI) que típicamente afecta la transmisión por cable de cobre.
Resultado esperado:
* Salida de señal: Una forma de onda de voltaje medible en la salida del TIA (V_PRE) que refleja la forma de onda de audio transmitida.
* Salida de audio: Reproducción de sonido clara a través del altavoz (LS1) cuando el fotodiodo recibe luz modulada.
* Niveles de voltaje: La salida del TIA debe oscilar sobre una polarización de CC (aprox. VCC/2) con una oscilación de señal de CA que depende de la intensidad de la luz.
* Control de volumen: Ajuste del nivel de audio mediante el potenciómetro (R_VOL).
Público objetivo: Estudiantes de electrónica y aficionados interesados en el acondicionamiento de señales analógicas.
Materiales
- V1: Fuente de voltaje de 9 V CC, función: Fuente de alimentación principal del circuito.
- D1: Fotodiodo BPW34, función: Sensor óptico (convertidor de luz a corriente).
- U1: Amplificador Operacional TL071, función: Amplificador de Transimpedancia (TIA).
- U2: CI Amplificador de Audio LM386N-1, función: Amplificación de potencia para altavoz.
- R_F: Resistencia de 100 kΩ, función: Resistencia de retroalimentación del TIA (ajusta la ganancia).
- R_B1: Resistencia de 10 kΩ, función: Parte superior del divisor de voltaje para polarización VCC/2.
- R_B2: Resistencia de 10 kΩ, función: Parte inferior del divisor de voltaje para polarización VCC/2.
- R_VOL: Potenciómetro de 10 kΩ, función: Control de volumen de audio.
- C_DEC: Condensador cerámico de 100 nF, función: Desacoplo de la fuente de alimentación.
- C_BIAS: Condensador electrolítico de 10 µF, función: Estabilizar el punto de polarización VCC/2.
- C_COUP: Condensador electrolítico de 4.7 µF, función: Bloqueo de CC entre el TIA y el amplificador de audio.
- C_OUT: Condensador electrolítico de 220 µF, función: Acoplamiento de salida para el altavoz.
- C_GAIN: Condensador electrolítico de 10 µF, función: Ajuste de ganancia del LM386 (Pines 1-8).
- LS1: Altavoz de 8 Ω / 0.5W, función: Transductor de audio.
Guía de conexionado
Esta guía define las conexiones utilizando nombres de nodo SPICE específicos: VCC, 0 (GND), V_BIAS, N_INV (Entrada inversora), V_PRE (Salida preamplificador), V_WIPER (Salida potenciómetro) y V_SPK (Salida amplificador).
Potencia y Polarización:
* V1: Terminal positivo a VCC, terminal negativo a 0.
* R_B1: Conecta entre VCC y V_BIAS.
* R_B2: Conecta entre V_BIAS y 0.
* C_BIAS: Terminal positivo a V_BIAS, terminal negativo a 0.
* C_DEC: Conecta entre VCC y 0 (cerca de U1).
Amplificador de Transimpedancia (Etapa 1):
* U1 (Op-Amp): Pin V+ a VCC, pin V- a 0. Entrada no inversora (+) a V_BIAS. Entrada inversora (-) a N_INV. Pin de salida a V_PRE.
* D1 (Fotodiodo): Cátodo a VCC, Ánodo a N_INV (Polarización inversa).
* R_F: Conecta entre N_INV y V_PRE.
Acoplamiento de señal:
* C_COUP: Terminal positivo a V_PRE, terminal negativo a NODE_POT_TOP.
* R_VOL: Terminal superior a NODE_POT_TOP, terminal inferior a 0, Cursor (Wiper) a V_WIPER.
Amplificador de Potencia (Etapa 2):
* U2 (LM386): Vs (Pin 6) a VCC, GND (Pin 4) a 0. Entrada no inversora (Pin 3) a V_WIPER. Entrada inversora (Pin 2) a 0.
* C_GAIN: Conecta entre el Pin 1 y el Pin 8 de U2 (Positivo al Pin 1).
* C_OUT: Terminal positivo a la Salida de U2 (Pin 5), terminal negativo a V_SPK.
* LS1: Conecta entre V_SPK y 0.
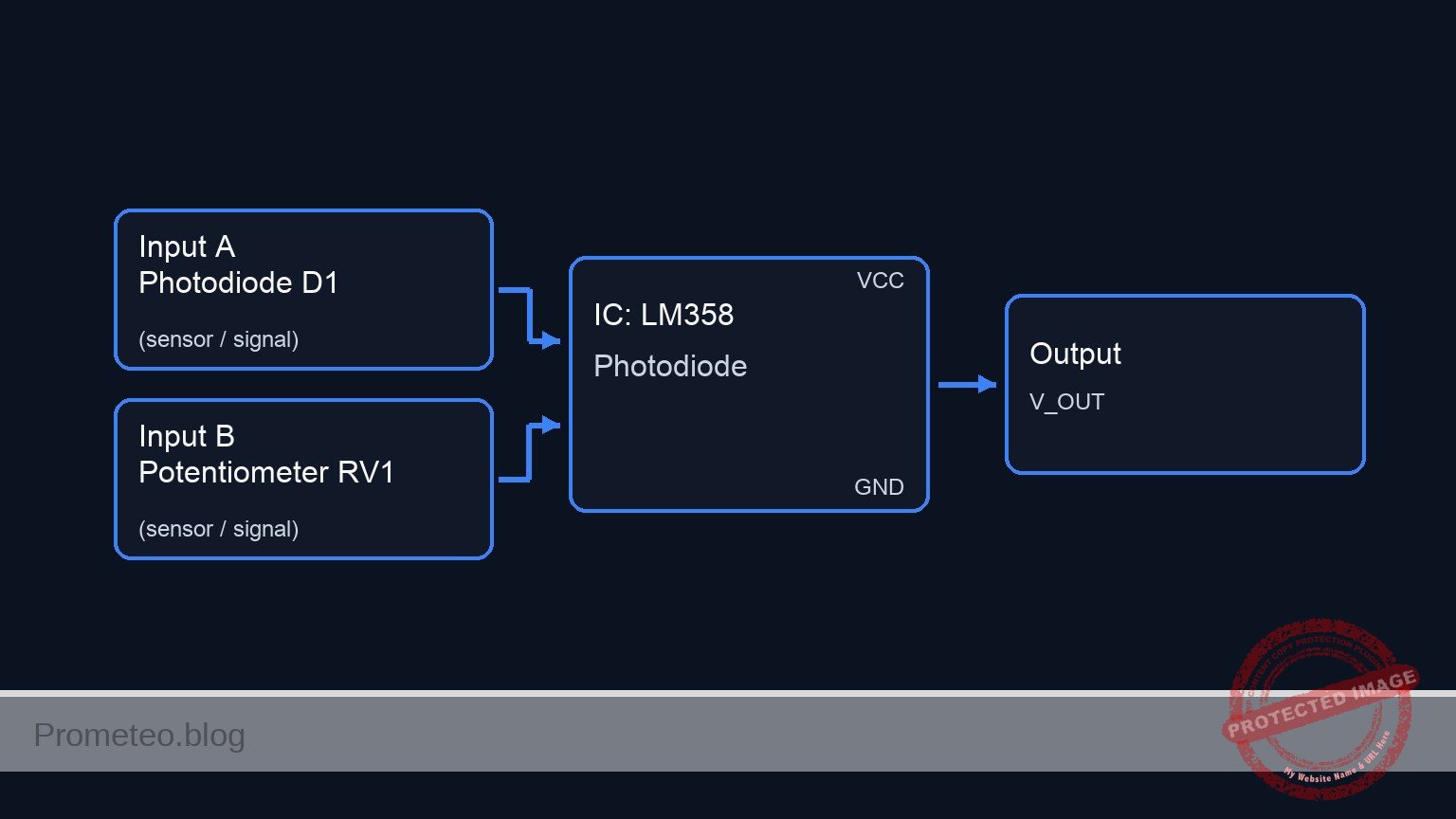
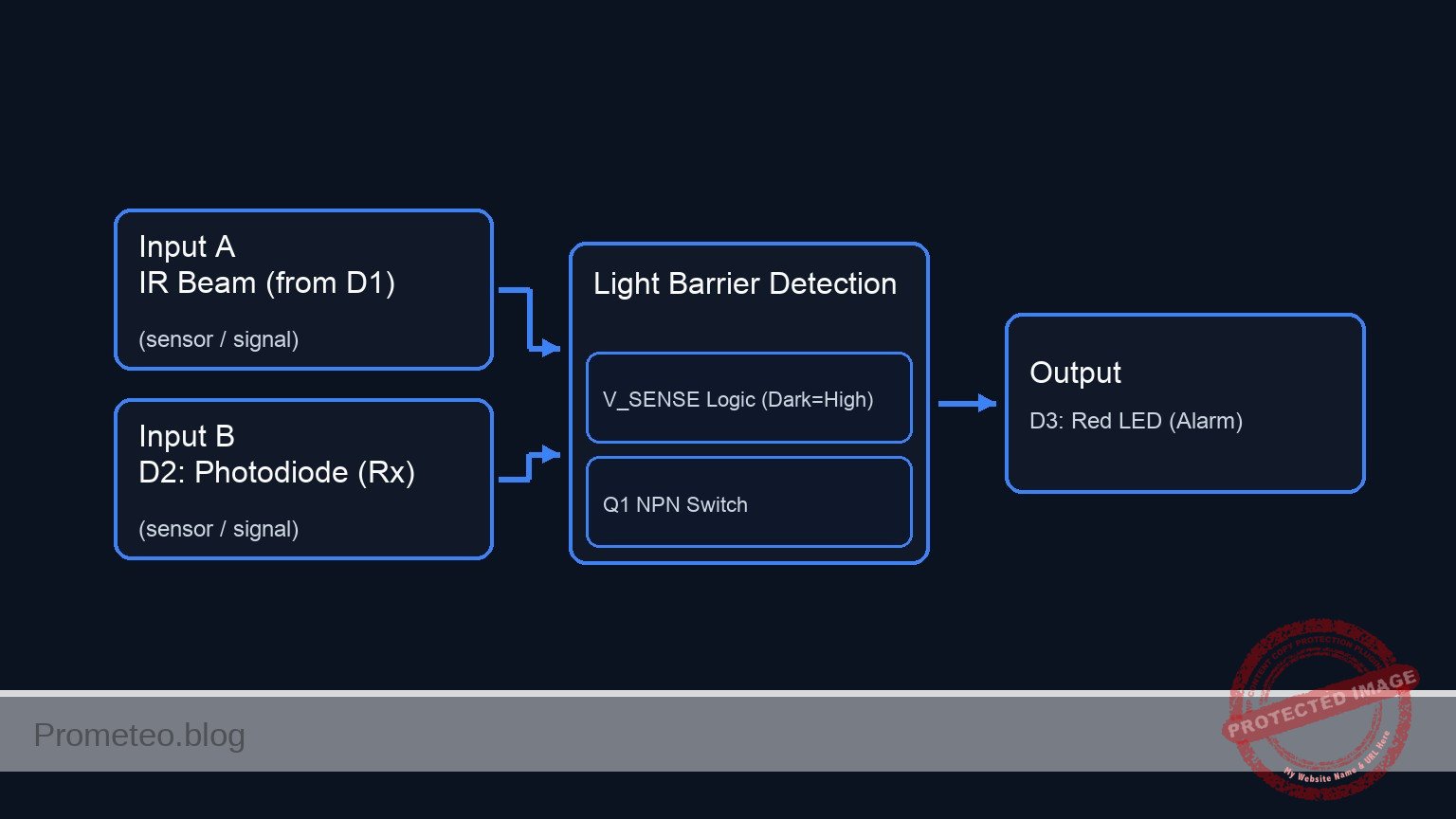
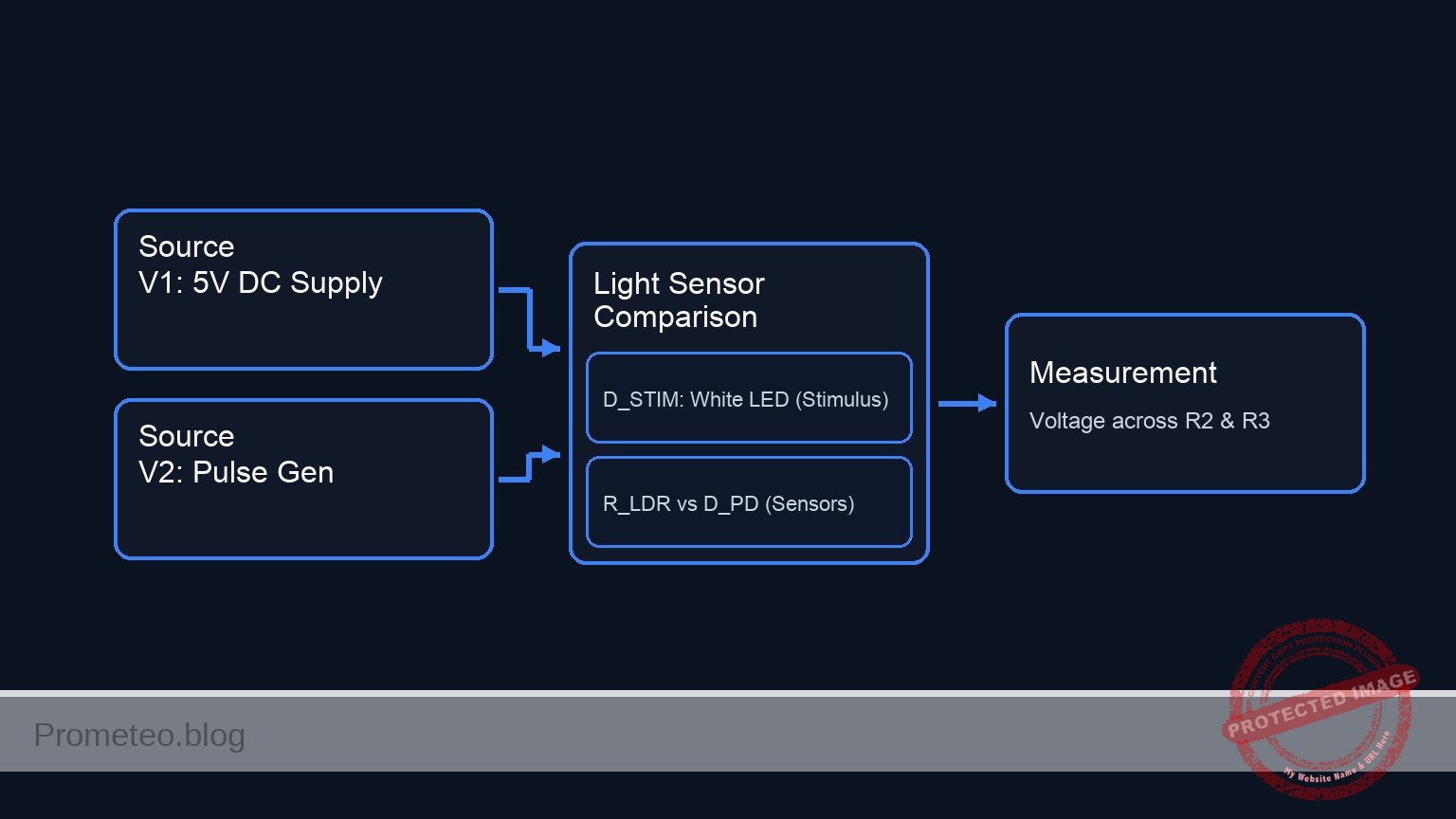
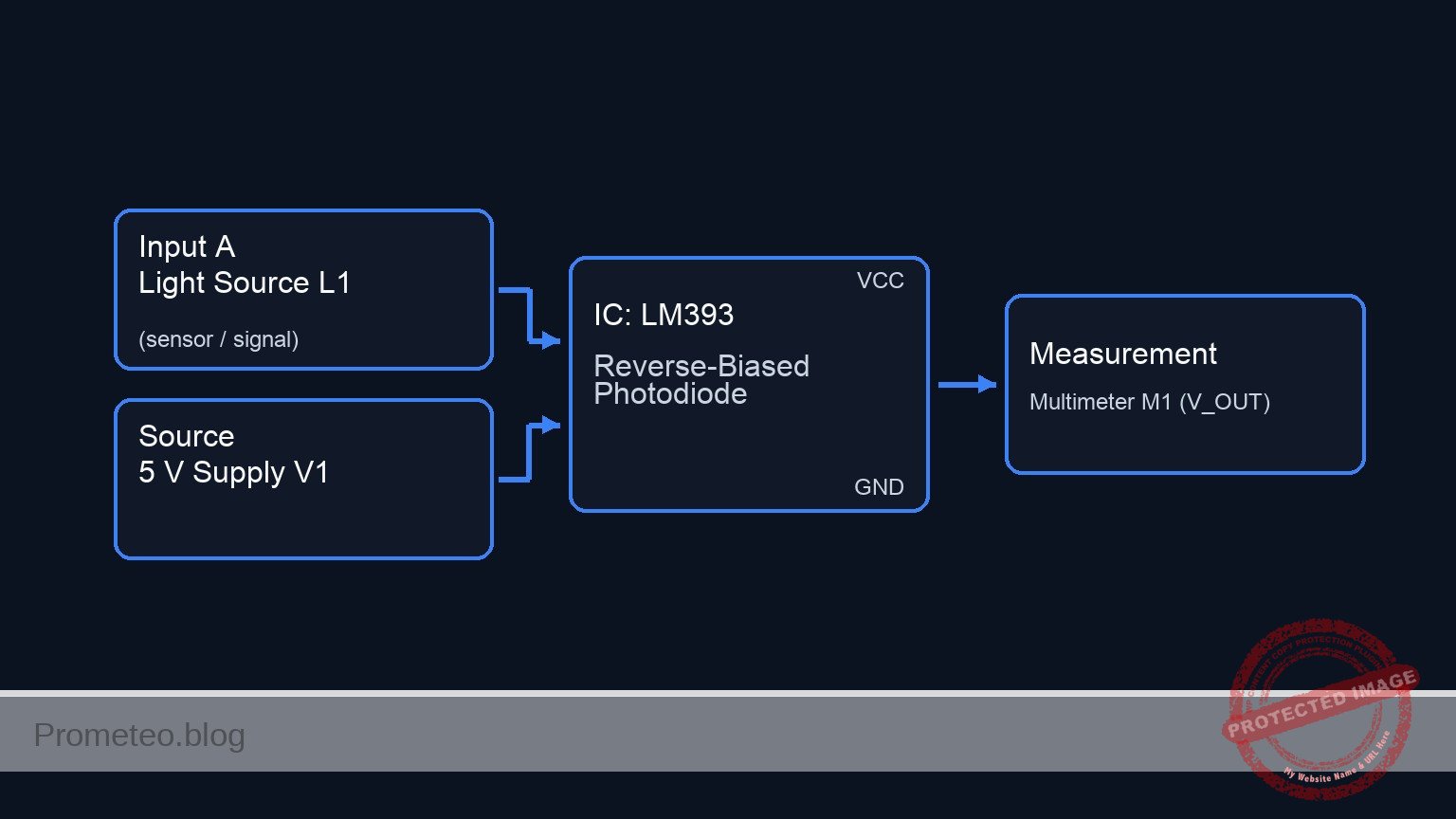
Diagrama de bloques conceptual

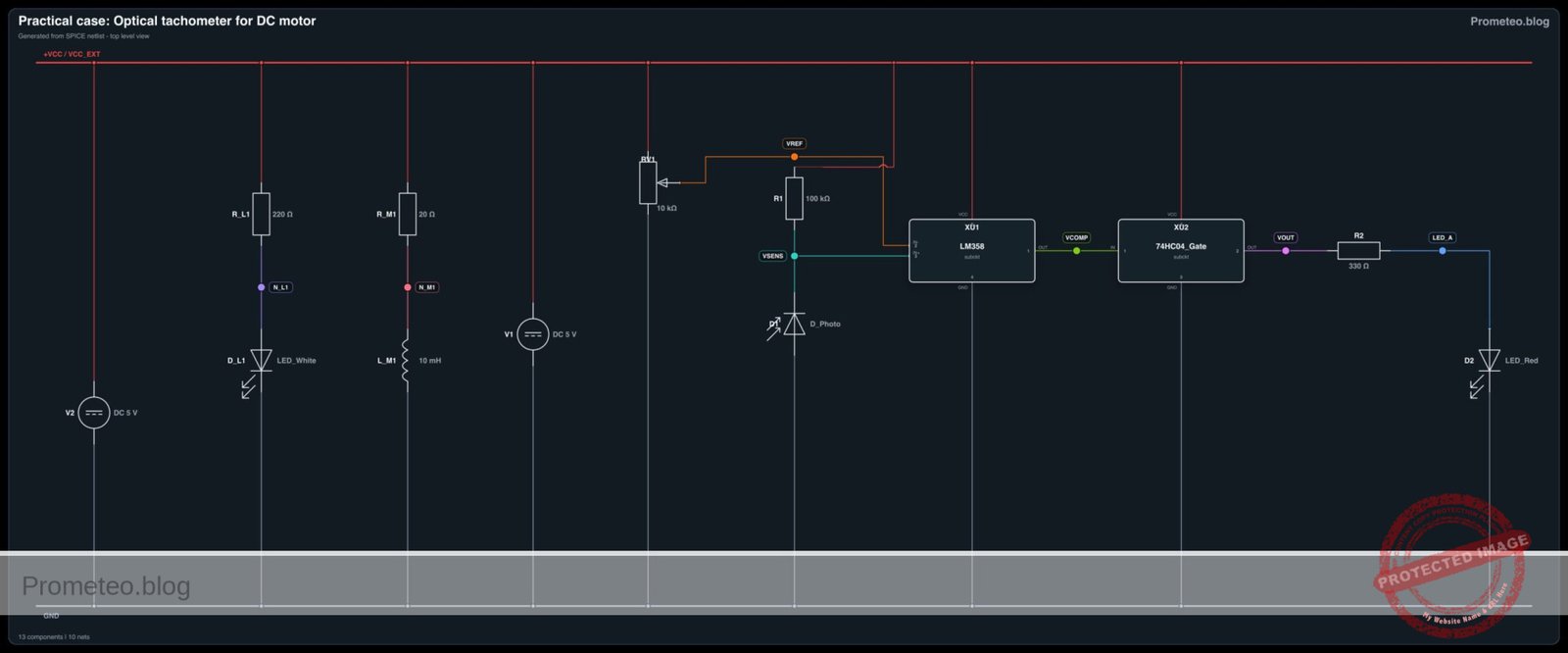
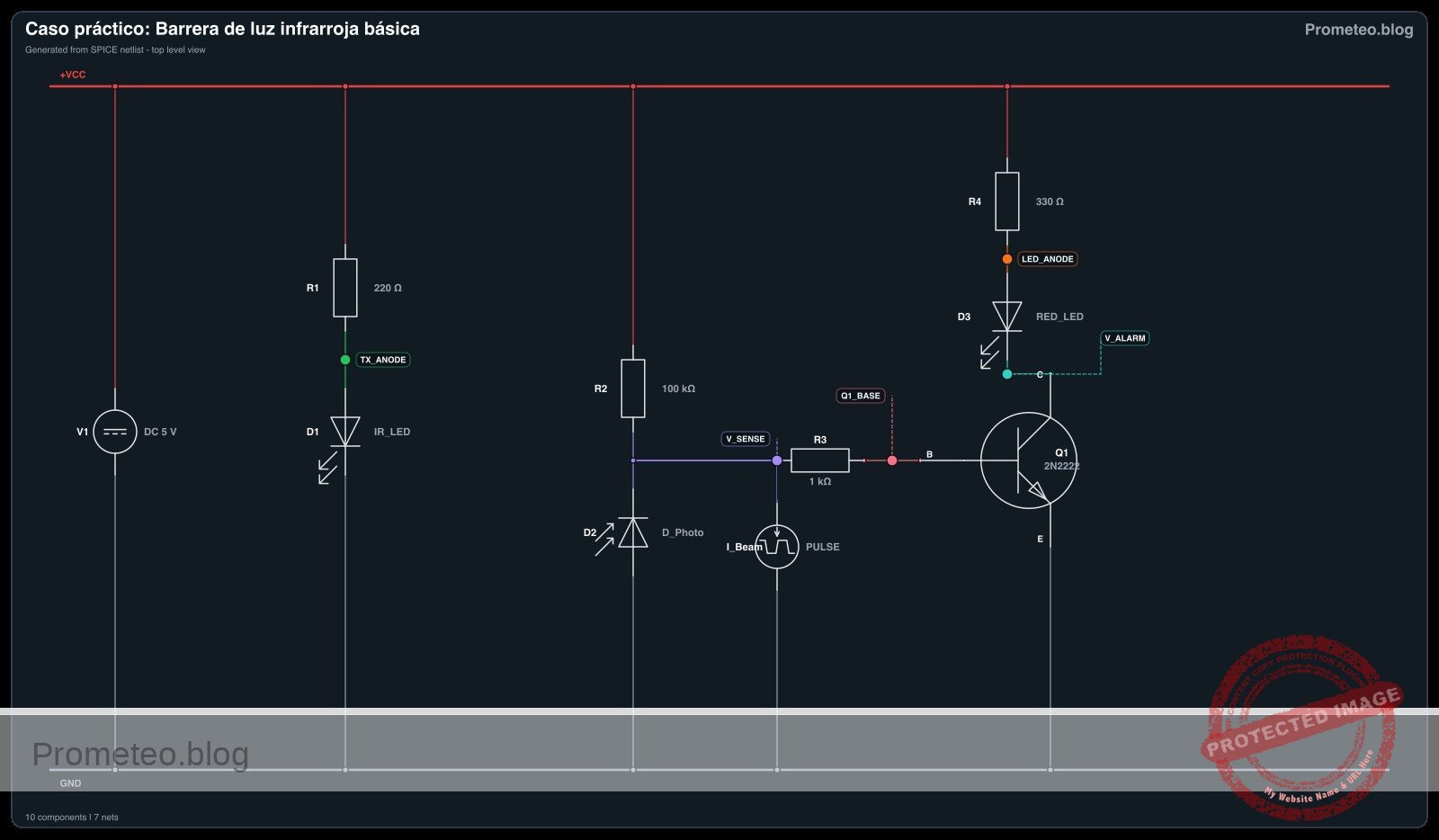
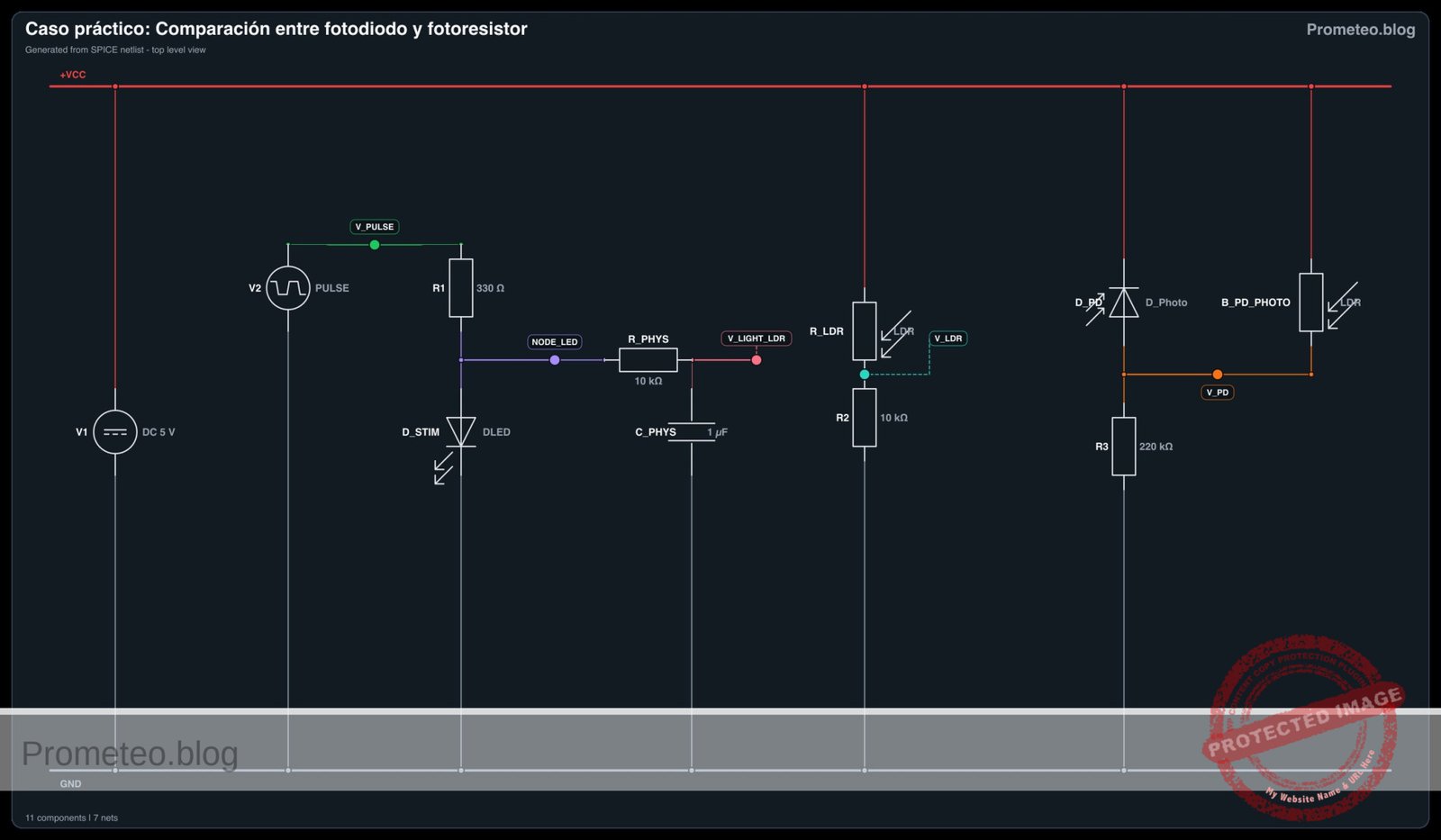
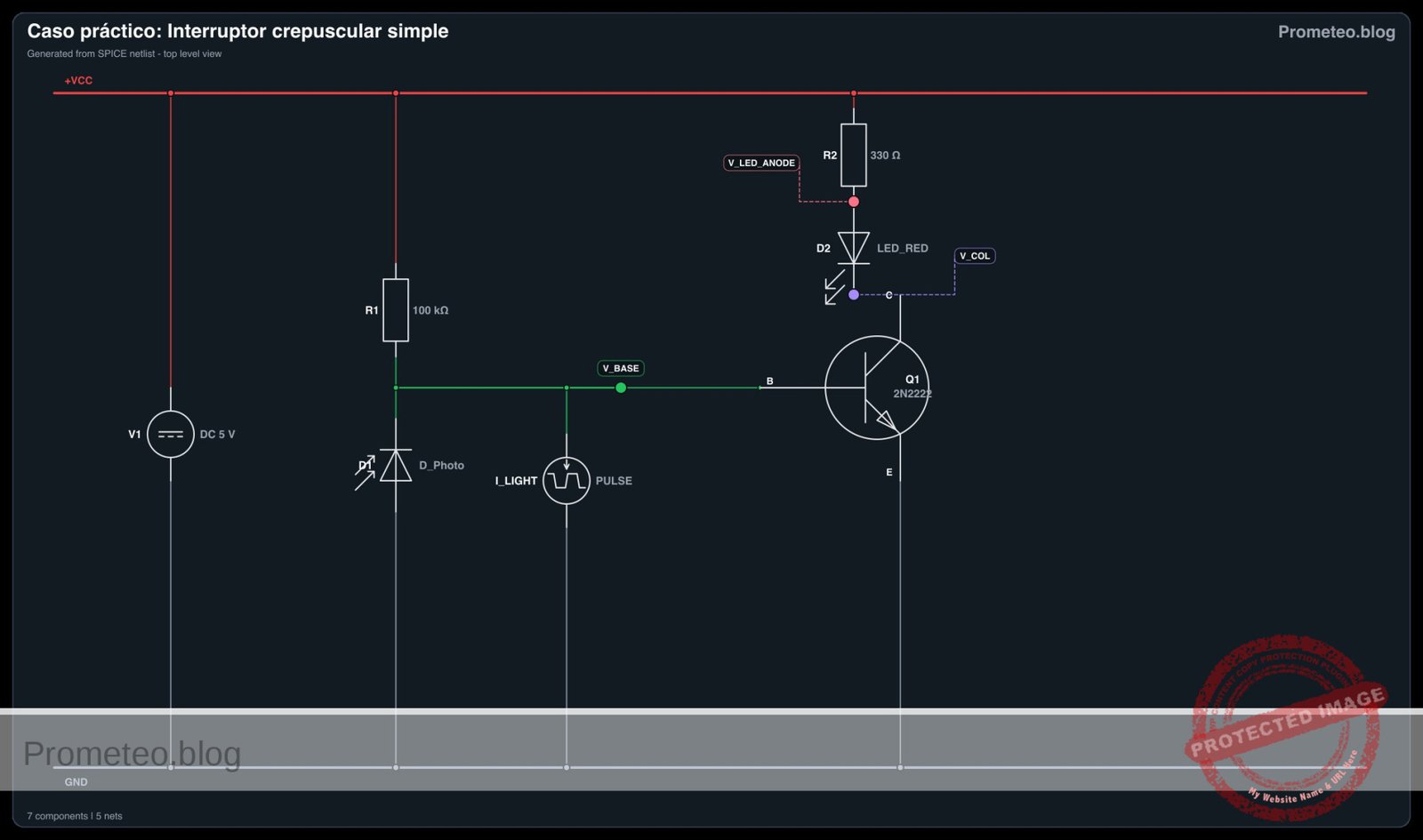
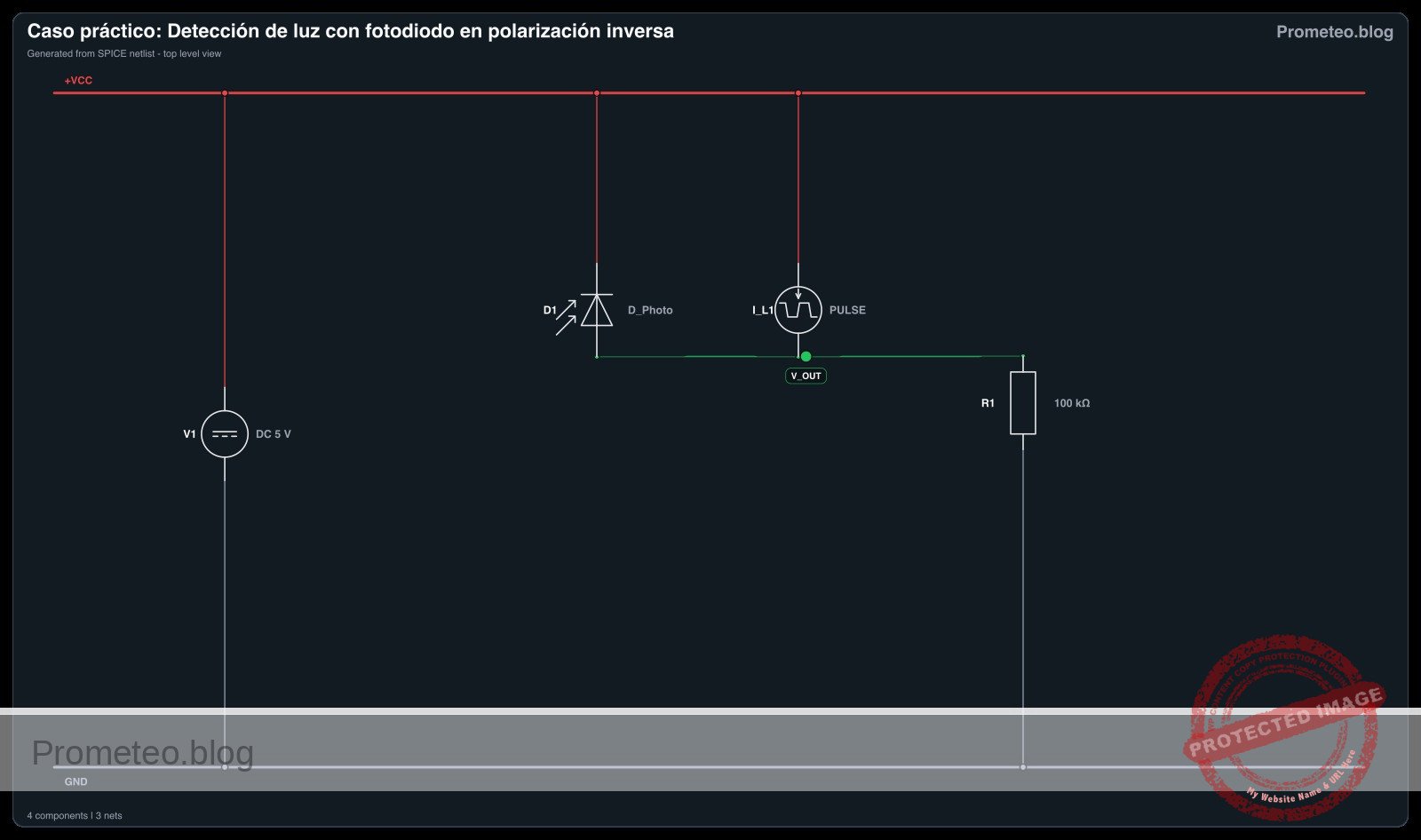
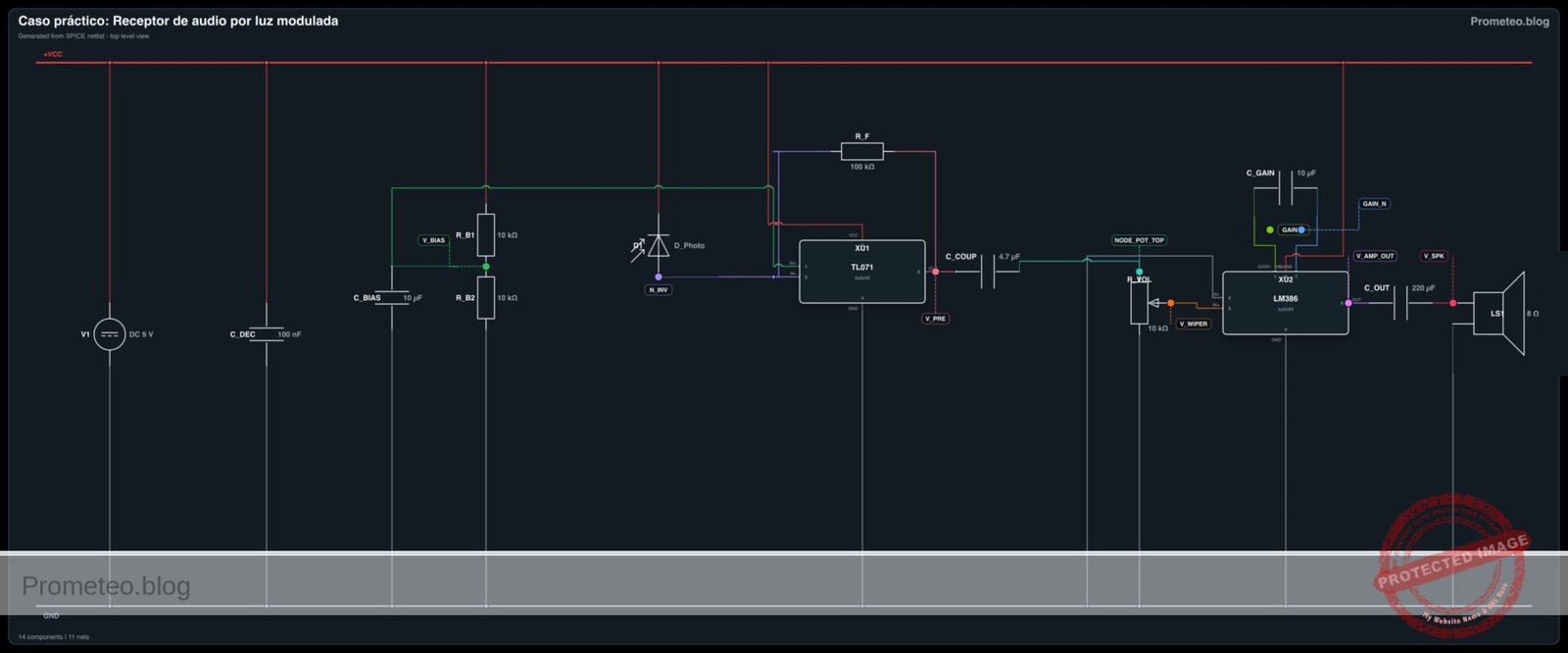
Esquemático
Title: Practical case: Modulated light audio receiver
[ INPUT / SENSOR ] [ STAGE 1: TIA PRE-AMP ] [ INTERSTAGE ] [ STAGE 2: POWER AMP ] [ OUTPUT ]
+-----------[ R_F: 100k ]-----------+
| (Feedback) |
v |
(Light) ~~~> [ D1: BPW34 ] --(I)--> [ (-) N_INV U1: TL071 OUT ] --(V_PRE)--> [ C_COUP ] --> [ R_VOL: 10k ] --(V_WIPER)-->+
(Photodiode) | | (4.7uF) (Volume Pot) |
| (+) V_BIAS | |
+----------------^-------------------+ |
| |
[ POWER & BIAS ] | v
| [ IN+ U2: LM386 OUT ] --(V_SPK)--> [ C_OUT ] --> [ LS1: Speaker ]
[ V1: 9 V DC Source ] --(VCC)--> (Powers U1, U2) | | | (220uF) (8 Ohm)
| | | Gain Pins 1-8 | |
+---> [ Bias Divider ] --(VCC/2 Ref)----+ +--------+--------+ GND
(R_B1, R_B2, |
C_BIAS) [ C_GAIN ]
(10uF)
Diagrama eléctrico
Mediciones y pruebas
- Verificación del punto de polarización: Usa un multímetro para medir el voltaje en el nodo
V_BIAS. Debería ser aproximadamente 4.5 V (la mitad de VCC). Si no, revisa R_B1 y R_B2. - Nivel de luz ambiental: Mide el voltaje de CC en
V_PREsin ninguna señal modulada (solo luz ambiental). Debería ser ligeramente inferior aV_BIASdependiendo del brillo ambiental que incide en D1. - Adquisición de señal:
- Apunta una fuente de luz modulada (por ejemplo, un LED conectado a una salida de audio o un generador de señales) hacia D1.
- Usa un osciloscopio en
V_PRE. Deberías ver una forma de onda de CA superpuesta al nivel de CC. - Mide el Vpp (Voltaje pico a pico). Debería estar en el rango de 100 mV a 1 V dependiendo de la distancia y la intensidad de la luz.
- Prueba de audio: Sube R_VOL lentamente. Deberías escuchar el audio transmitido claramente desde LS1.
Netlist SPICE y simulación
Netlist SPICE de referencia (ngspice) — extractoNetlist SPICE completo (ngspice)
* Practical case: Modulated light audio receiver
* --- Component Models ---
* Generic Photodiode Model
.model D_BPW34 D(Is=1n Rs=5 Cjo=10p)
* --- Subcircuits ---
* TL071 Operational Amplifier Macro Model
* Pinout: 1=NonInv 2=Inv 3=V+ 4=V- 5=Out
.SUBCKT TL071 P_NI P_INV P_VCC P_VEE P_OUT
* Input Impedance
Rin P_NI P_INV 1T
* Output Stage (Behavioral with Rail Limiting)
* Models high open-loop gain and saturation at Rails +/- 1.5V
B1 P_OUT 0 V=V(P_VEE) + 1.5 + (V(P_VCC)-V(P_VEE)-3) * (1 / (1 + exp(-100000 * (V(P_NI)-V(P_INV)))))
.ENDS TL071
* LM386 Audio Amplifier Macro Model
* Pinout: 1=Gain 2=Inv 3=NonInv 4=GND 5=Out 6=Vs 8=Gain
* ... (truncated in public view) ...Copia este contenido en un archivo .cir y ejecútalo con ngspice.
* Practical case: Modulated light audio receiver
* --- Component Models ---
* Generic Photodiode Model
.model D_BPW34 D(Is=1n Rs=5 Cjo=10p)
* --- Subcircuits ---
* TL071 Operational Amplifier Macro Model
* Pinout: 1=NonInv 2=Inv 3=V+ 4=V- 5=Out
.SUBCKT TL071 P_NI P_INV P_VCC P_VEE P_OUT
* Input Impedance
Rin P_NI P_INV 1T
* Output Stage (Behavioral with Rail Limiting)
* Models high open-loop gain and saturation at Rails +/- 1.5V
B1 P_OUT 0 V=V(P_VEE) + 1.5 + (V(P_VCC)-V(P_VEE)-3) * (1 / (1 + exp(-100000 * (V(P_NI)-V(P_INV)))))
.ENDS TL071
* LM386 Audio Amplifier Macro Model
* Pinout: 1=Gain 2=Inv 3=NonInv 4=GND 5=Out 6=Vs 8=Gain
.SUBCKT LM386 P_G1 P_INV P_NI P_GND P_OUT P_VS P_G8
* Internal Gain Resistor (1.35k) connecting Pins 1 and 8
R_GAIN_INT P_G1 P_G8 1.35k
* High resistance to GND to prevent floating node errors for the Gain capacitor
R_C1 P_G1 0 100Meg
R_C8 P_G8 0 100Meg
* Audio Amplifier Behavioral Source
* Self-biasing output to Vs/2
* Fixed Gain approx 200 (Assuming C_GAIN is present externally)
B_OUT P_OUT P_GND V=V(P_VS)/2 + 200*(V(P_NI)-V(P_INV))
.ENDS LM386
* --- Main Circuit ---
* Power Supply (9V)
V1 VCC 0 DC 9
* Power Supply Decoupling
C_DEC VCC 0 100n
* Bias Voltage Generator (VCC/2)
R_B1 VCC V_BIAS 10k
R_B2 V_BIAS 0 10k
C_BIAS V_BIAS 0 10u
* --- Stage 1: Transimpedance Amplifier (TIA) ---
* U1 TL071 Op-Amp
* Connections: NI=V_BIAS, INV=N_INV, V+=VCC, V-=0, OUT=V_PRE
XU1 V_BIAS N_INV VCC 0 V_PRE TL071
* Photodiode Sensor (Reverse Biased)
* Cathode to VCC, Anode to N_INV
D1 N_INV VCC D_BPW34
* Optical Signal Simulation
* Current source representing modulated light (1kHz square wave)
* Connected parallel to photodiode (Anode to Cathode current flow)
I_LIGHT N_INV VCC PULSE(0 2u 0 1u 1u 500u 1000u)
* Feedback Resistor
R_F N_INV V_PRE 100k
* --- Signal Coupling ---
* DC Blocking Capacitor
C_COUP V_PRE NODE_POT_TOP 4.7u
* Volume Potentiometer (10k)
* Modeled as voltage divider. Wiper set to 20% to manage gain.
* Top Resistor (8k)
R_VOL_TOP NODE_POT_TOP V_WIPER 8k
* Bottom Resistor (2k)
R_VOL_BOT V_WIPER 0 2k
* --- Stage 2: Power Amplifier ---
* U2 LM386 Audio Amp
* Connections: 1=GAIN_P, 2=0, 3=V_WIPER, 4=0, 5=V_AMP_OUT, 6=VCC, 8=GAIN_N
XU2 GAIN_P 0 V_WIPER 0 V_AMP_OUT VCC GAIN_N LM386
* Gain Setting Capacitor (Pins 1-8)
C_GAIN GAIN_P GAIN_N 10u
* Output Coupling Capacitor
C_OUT V_AMP_OUT V_SPK 220u
* Speaker Load (8 Ohm)
LS1 V_SPK 0 8
* --- Simulation Directives ---
* Transient analysis for 5ms to see 5 cycles of 1kHz audio
.tran 10u 5ms
* Output data for plotting
.print tran V(V_PRE) V(V_WIPER) V(V_SPK)
.endResultados de Simulación (Transitorio)

Show raw data table (623 rows)
Index time v(v_pre) v(v_wiper) v(v_spk) 0 0.000000e+00 4.499900e+00 0.000000e+00 0.000000e+00 1 1.000000e-08 4.501899e+00 3.998838e-04 7.997676e-02 2 1.083984e-08 4.502067e+00 4.334770e-04 8.669540e-02 3 1.251953e-08 4.502403e+00 5.006638e-04 1.001328e-01 4 1.587889e-08 4.503075e+00 6.350376e-04 1.270075e-01 5 2.259763e-08 4.504418e+00 9.037850e-04 1.807570e-01 6 3.603509e-08 4.507106e+00 1.441280e-03 2.882560e-01 7 6.291003e-08 4.512481e+00 2.516269e-03 5.032538e-01 8 1.166599e-07 4.523231e+00 4.666245e-03 9.332491e-01 9 2.241596e-07 4.544731e+00 8.966191e-03 1.793238e+00 10 4.391591e-07 4.587730e+00 1.756605e-02 3.513210e+00 11 8.691581e-07 4.673729e+00 3.476566e-02 6.953131e+00 12 1.000000e-06 4.699898e+00 3.999919e-02 7.999838e+00 13 1.086000e-06 4.699898e+00 3.999923e-02 7.999847e+00 14 1.257999e-06 4.699898e+00 3.999909e-02 7.999818e+00 15 1.601999e-06 4.699898e+00 3.999879e-02 7.999759e+00 16 2.289997e-06 4.699898e+00 3.999821e-02 7.999642e+00 17 3.665994e-06 4.699898e+00 3.999704e-02 7.999408e+00 18 6.417987e-06 4.699898e+00 3.999470e-02 7.998939e+00 19 1.192197e-05 4.699898e+00 3.999001e-02 7.998002e+00 20 2.192197e-05 4.699898e+00 3.998151e-02 7.996300e+00 21 3.192197e-05 4.699898e+00 3.997300e-02 7.994598e+00 22 4.192197e-05 4.699898e+00 3.996450e-02 7.992895e+00 23 5.192197e-05 4.699898e+00 3.995599e-02 7.991193e+00 ... (599 more rows) ...
Netlist SPICE de referencia (ngspice)
* Practical case: Modulated light audio receiver
* --- Component Models ---
* Generic Photodiode Model
.model D_BPW34 D(Is=1n Rs=5 Cjo=10p)
* --- Subcircuits ---
* TL071 Operational Amplifier Macro Model
* Pinout: 1=NonInv 2=Inv 3=V+ 4=V- 5=Out
.SUBCKT TL071 P_NI P_INV P_VCC P_VEE P_OUT
* Input Impedance
Rin P_NI P_INV 1T
* Output Stage (Behavioral with Rail Limiting)
* Models high open-loop gain and saturation at Rails +/- 1.5V
B1 P_OUT 0 V=V(P_VEE) + 1.5 + (V(P_VCC)-V(P_VEE)-3) * (1 / (1 + exp(-100000 * (V(P_NI)-V(P_INV)))))
.ENDS TL071
* LM386 Audio Amplifier Macro Model
* Pinout: 1=Gain 2=Inv 3=NonInv 4=GND 5=Out 6=Vs 8=Gain
.SUBCKT LM386 P_G1 P_INV P_NI P_GND P_OUT P_VS P_G8
* Internal Gain Resistor (1.35k) connecting Pins 1 and 8
R_GAIN_INT P_G1 P_G8 1.35k
* High resistance to GND to prevent floating node errors for the Gain capacitor
R_C1 P_G1 0 100Meg
R_C8 P_G8 0 100Meg
* Audio Amplifier Behavioral Source
* Self-biasing output to Vs/2
* Fixed Gain approx 200 (Assuming C_GAIN is present externally)
B_OUT P_OUT P_GND V=V(P_VS)/2 + 200*(V(P_NI)-V(P_INV))
.ENDS LM386
* --- Main Circuit ---
* Power Supply (9V)
V1 VCC 0 DC 9
* Power Supply Decoupling
C_DEC VCC 0 100n
* Bias Voltage Generator (VCC/2)
R_B1 VCC V_BIAS 10k
R_B2 V_BIAS 0 10k
C_BIAS V_BIAS 0 10u
* --- Stage 1: Transimpedance Amplifier (TIA) ---
* U1 TL071 Op-Amp
* Connections: NI=V_BIAS, INV=N_INV, V+=VCC, V-=0, OUT=V_PRE
XU1 V_BIAS N_INV VCC 0 V_PRE TL071
* Photodiode Sensor (Reverse Biased)
* Cathode to VCC, Anode to N_INV
D1 N_INV VCC D_BPW34
* Optical Signal Simulation
* Current source representing modulated light (1kHz square wave)
* Connected parallel to photodiode (Anode to Cathode current flow)
I_LIGHT N_INV VCC PULSE(0 2u 0 1u 1u 500u 1000u)
* Feedback Resistor
R_F N_INV V_PRE 100k
* --- Signal Coupling ---
* DC Blocking Capacitor
C_COUP V_PRE NODE_POT_TOP 4.7u
* Volume Potentiometer (10k)
* Modeled as voltage divider. Wiper set to 20% to manage gain.
* Top Resistor (8k)
R_VOL_TOP NODE_POT_TOP V_WIPER 8k
* Bottom Resistor (2k)
R_VOL_BOT V_WIPER 0 2k
* --- Stage 2: Power Amplifier ---
* U2 LM386 Audio Amp
* Connections: 1=GAIN_P, 2=0, 3=V_WIPER, 4=0, 5=V_AMP_OUT, 6=VCC, 8=GAIN_N
XU2 GAIN_P 0 V_WIPER 0 V_AMP_OUT VCC GAIN_N LM386
* Gain Setting Capacitor (Pins 1-8)
C_GAIN GAIN_P GAIN_N 10u
* Output Coupling Capacitor
C_OUT V_AMP_OUT V_SPK 220u
* Speaker Load (8 Ohm)
LS1 V_SPK 0 8
* --- Simulation Directives ---
* Transient analysis for 5ms to see 5 cycles of 1kHz audio
.tran 10u 5ms
* Output data for plotting
.print tran V(V_PRE) V(V_WIPER) V(V_SPK)
.endResultados de Simulación (Transitorio)
Errores comunes y cómo evitarlos
- Polaridad invertida del fotodiodo: Conectar el ánodo a VCC polarizará el diodo en directa, haciendo que conduzca completamente y sature el amplificador. Solución: Asegúrate de que el Cátodo (generalmente marcado con un lado plano o una pata más corta) vaya a
VCC. - Omitir condensadores de bloqueo de CC: Conectar la salida del TIA directamente al potenciómetro de volumen del LM386 puede alterar la polarización del amplificador de audio. Solución: Usa siempre C_COUP para pasar solo la señal de audio y bloquear el desplazamiento de CC.
- Saturación óptica: Probar bajo luz solar directa o luz artificial muy fuerte satura el fotodiodo, aplanando la señal. Solución: Usa un escudo óptico (un tubo negro) alrededor de D1 para limitar el campo de visión solo al transmisor.
Solución de problemas
- Síntoma: Zumbido fuerte y constante.
- Causa: Captación de ruido de 50Hz/60Hz de la iluminación ambiental de la habitación (fluorescente/red eléctrica).
- Solución: Apaga las luces de la habitación o usa un filtro óptico (plástico rojo/IR) sobre D1.
- Síntoma: No hay audio, pero
V_PREmuestra señal.- Causa: R_VOL está al mínimo o el cableado del LM386 es incorrecto.
- Solución: Verifica la conexión del cursor del potenciómetro y asegúrate de que los pines de alimentación de U2 sean correctos.
- Síntoma: La señal está recortada (cuadrada) en el TIA.
- Causa: La resistencia de ganancia R_F es demasiado alta para la intensidad de luz recibida.
- Solución: Reduce R_F a 47 kΩ o aleja más el transmisor.
Posibles mejoras y extensiones
- Filtro paso banda: Reemplaza R_F con una red en T o añade un condensador en paralelo para crear un filtro paso bajo, y añade una etapa de filtro paso alto para eliminar el zumbido de la red de 50/60Hz.
- Salida Schmitt Trigger: Alimenta la salida de
V_PREa un comparador o Schmitt trigger (como un 74HC14) para convertir el receptor de audio analógico en un receptor de datos digital para transmisión UART.
Más Casos Prácticos en Prometeo.blog
Encuentra este producto y/o libros sobre este tema en Amazon
Como afiliado de Amazon, gano con las compras que cumplan los requisitos. Si compras a través de este enlace, ayudas a mantener este proyecto.
Quiz rápido

Ingeniero Superior en Electrónica de Telecomunicaciones e Ingeniero en Informática (titulaciones oficiales en España).