Nivel: Medio. Implementar un circuito de seguridad industrial que active una alarma solo cuando los sensores de temperatura y presión excedan los límites de seguridad críticos.
Objetivo y caso de uso
En esta sesión, construirás un circuito lógico condicional utilizando un comparador LM393 para digitalizar señales de sensores analógicos y una puerta AND 74HC08 para procesar la lógica de seguridad.
- Seguridad en calderas industriales: Previene fallos catastróficos detectando cuando una caldera está sobrecalentada y sobrepresurizada simultáneamente.
- Sistemas hidráulicos: Monitoriza estados de fluidos para prevenir daños en bombas o roturas de tuberías durante operaciones de alto estrés.
- Monitorización de reactores químicos: Asegura que las condiciones de reacción permanezcan dentro de zonas seguras, activando la refrigeración de emergencia solo cuando múltiples variables críticas se disparan.
Resultado esperado:
* Estado seguro: El LED permanece APAGADO si solo una o ninguna variable excede el límite.
* Estado crítico: El LED rojo se ENCIENDE (Lógica Alta) solo cuando Temp > Límite Y Presión > Límite.
* Nivel lógico: La salida del 74HC08 cambia de ~0V a ~5V.
* Público objetivo: Estudiantes de ingeniería y aficionados familiarizados con amplificadores operacionales/comparadores y lógica digital básica.
Materiales
- V1: Fuente de alimentación de 5 V DC
- U1: 74HC08, función: Puerta AND cuádruple de 2 entradas
- U2: LM393, función: Comparador diferencial dual
- RT1: Termistor NTC de 10 kΩ, función: Sensor de temperatura
- R1: Resistencia de 10 kΩ, función: Parte inferior del divisor de tensión para el NTC
- RP1: Potenciómetro lineal de 10 kΩ, función: Simulador de sensor de presión
- RP2: Potenciómetro de 10 kΩ, función: Umbral de referencia de temperatura (V_REF_T)
- RP3: Potenciómetro de 10 kΩ, función: Umbral de referencia de presión (V_REF_P)
- R2: Resistencia de 4.7 kΩ, función: Pull-up para la salida del Comparador A (requerido para LM393)
- R3: Resistencia de 4.7 kΩ, función: Pull-up para la salida del Comparador B (requerido para LM393)
- R4: Resistencia de 330 Ω, función: Limitación de corriente del LED
- D1: LED rojo, función: Indicador de alerta crítica
Pin-out del CI utilizado
Chip seleccionado: 74HC08 (Puerta AND cuádruple de 2 entradas)
| Pin | Nombre | Función lógica | Conexión en este caso |
|---|---|---|---|
| 1 | 1A | Entrada A | Conectado a la salida del comparador de temperatura |
| 2 | 1B | Entrada B | Conectado a la salida del comparador de presión |
| 3 | 1Y | Salida | Conectado al LED (vía R4) |
| 7 | GND | Tierra | Conectado al raíl de alimentación de 0V |
| 14 | VCC | Alimentación | Conectado al raíl de alimentación de +5V |
Nota: El comparador LM393 también se utiliza, pero la decisión lógica ocurre en el 74HC08.
Guía de conexionado
Construye el circuito utilizando las siguientes conexiones de nodos:
- Raíl de alimentación: Conecta el terminal positivo de
V1al nodoVCCy el terminal negativo al nodo0(GND). Conecta el pin 14 deU1y el pin 8 deU2aVCC. Conecta el pin 7 deU1y el pin 4 deU2a0. - Entrada del sensor de temperatura (
V_TEMP): ConectaRT1entreVCCyV_TEMP. ConectaR1entreV_TEMPy0. (A medida que sube la Temp, la resistencia baja,V_TEMPsube). - Entrada del sensor de presión (
V_PRESS): Conecta el cursor deRP1al nodoV_PRESS. Conecta las patas exteriores deRP1aVCCy0. - Umbrales de referencia: Conecta el cursor de
RP2al nodoV_REF_T(Límite Temp). Conecta el cursor deRP3al nodoV_REF_P(Límite Presión). - Etapa de comparador (Digitalización):
- Conecta
V_TEMPal pin 3 deU2(Entrada no inversora A). - Conecta
V_REF_Tal pin 2 deU2(Entrada inversora A). - Conecta
V_PRESSal pin 5 deU2(Entrada no inversora B). - Conecta
V_REF_Pal pin 6 deU2(Entrada inversora B).
- Conecta
- Salidas del comparador (
LOGIC_TyLOGIC_P):- Conecta el pin 1 de
U2(Salida A) al nodoLOGIC_T. Conecta la resistencia pull-upR2entreLOGIC_TyVCC. - Conecta el pin 7 de
U2(Salida B) al nodoLOGIC_P. Conecta la resistencia pull-upR3entreLOGIC_PyVCC.
- Conecta el pin 1 de
- Puerta lógica:
- Conecta
LOGIC_Tal pin 1 deU1(Entrada 1A). - Conecta
LOGIC_Pal pin 2 deU1(Entrada 1B). - Conecta el pin 3 de
U1(Salida 1Y) al nodoALERT.
- Conecta
- Indicador: Conecta
R4entreALERTy el ánodo deD1. Conecta el cátodo deD1a0.
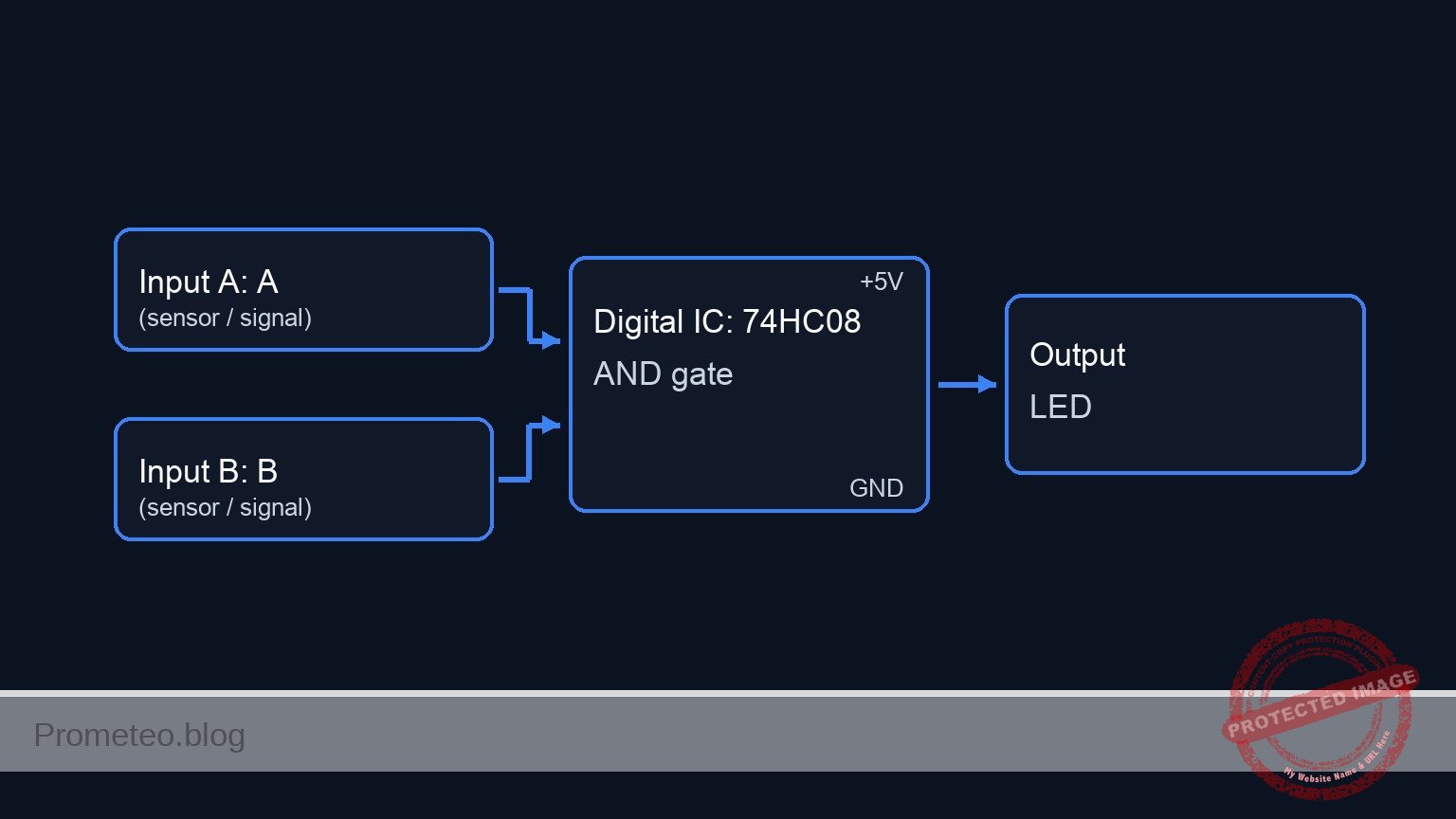
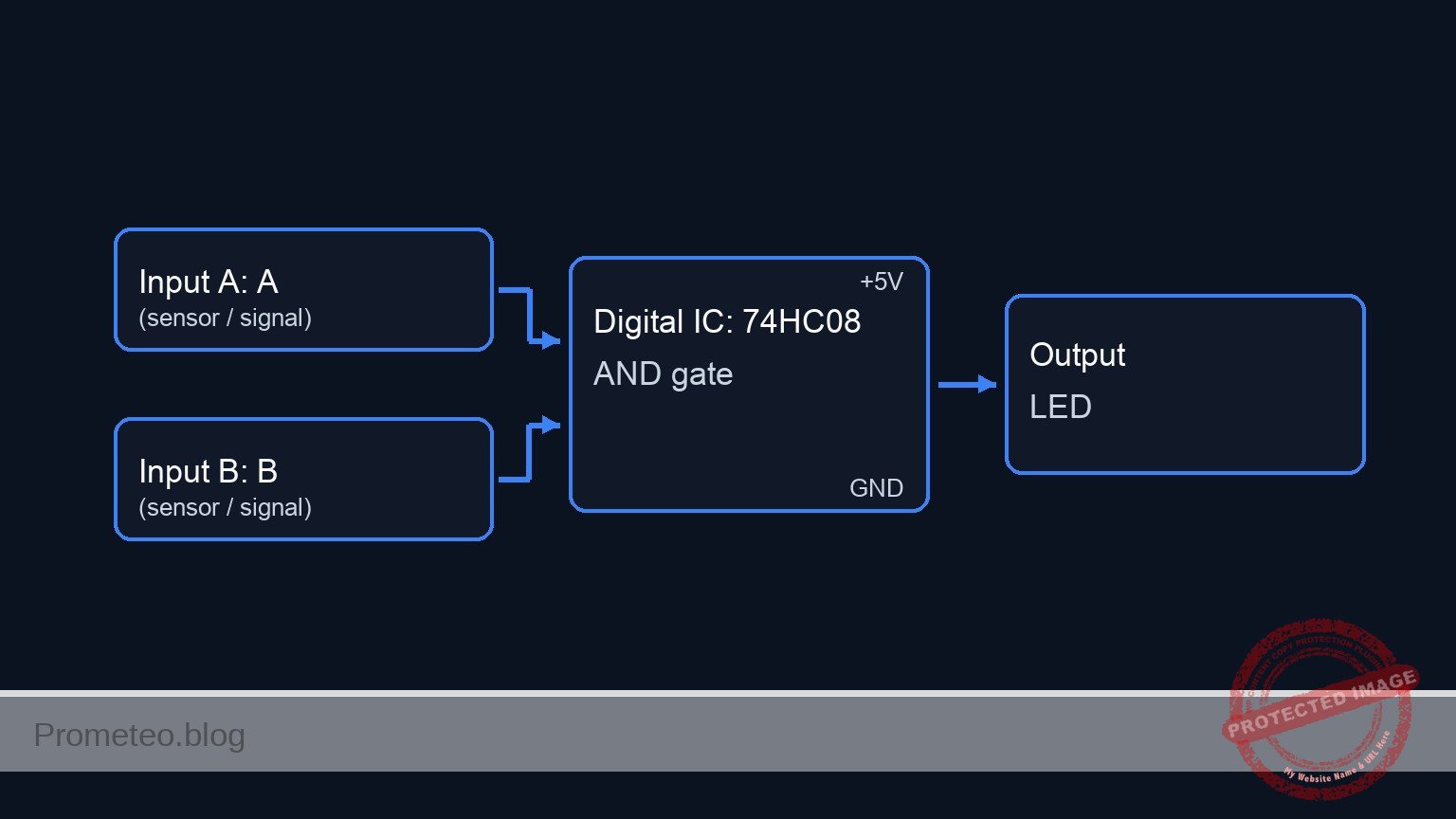
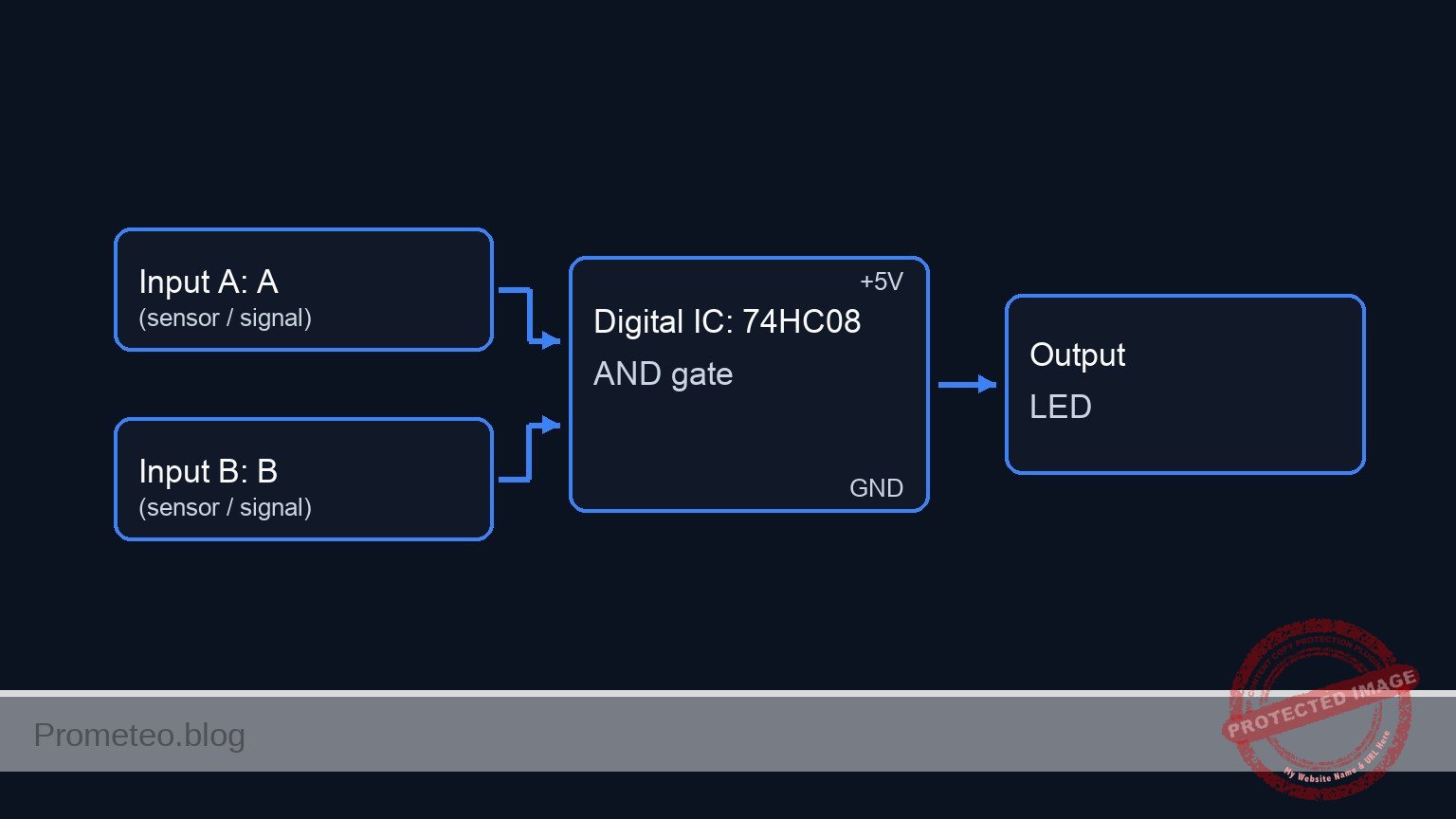
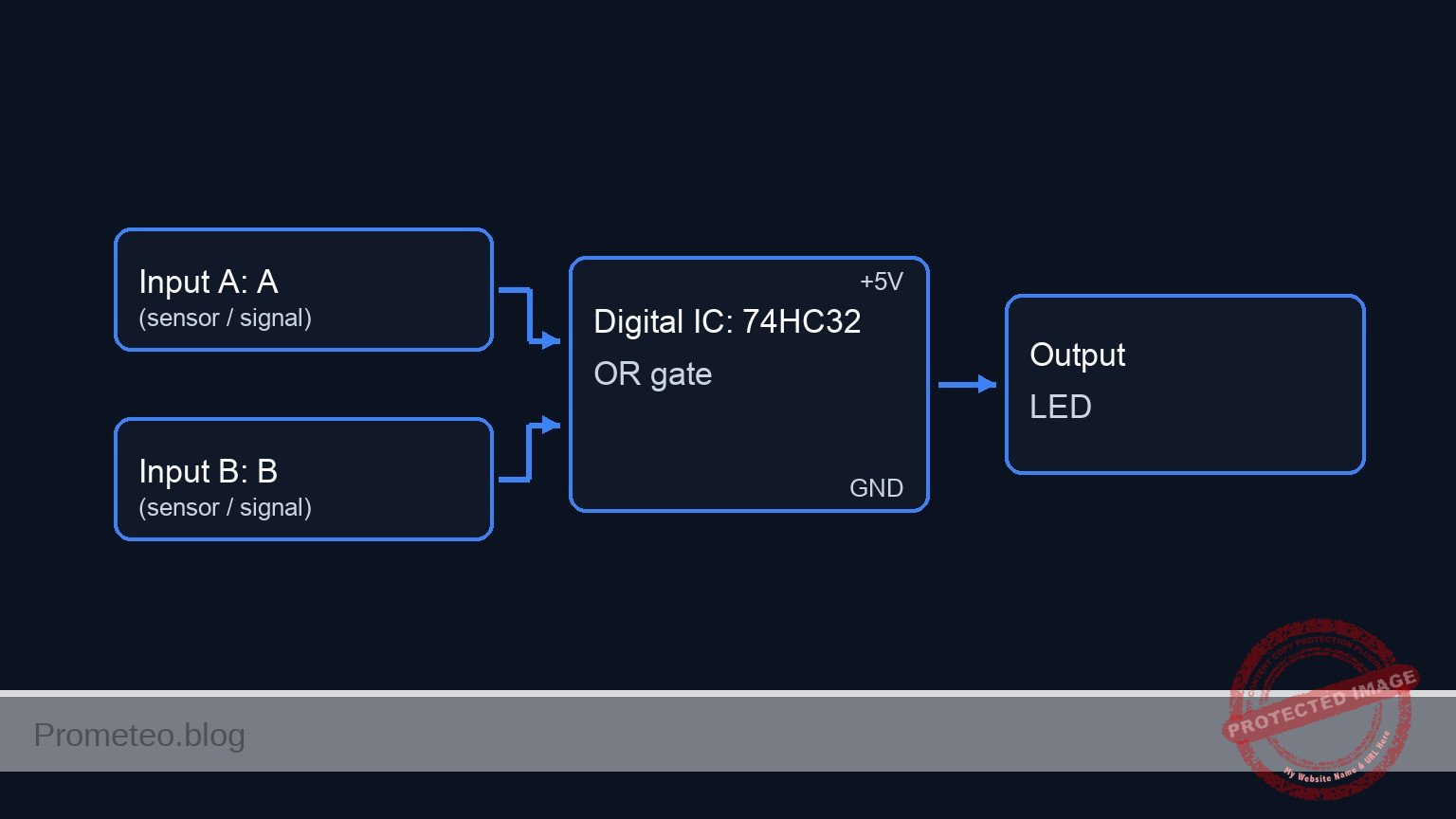
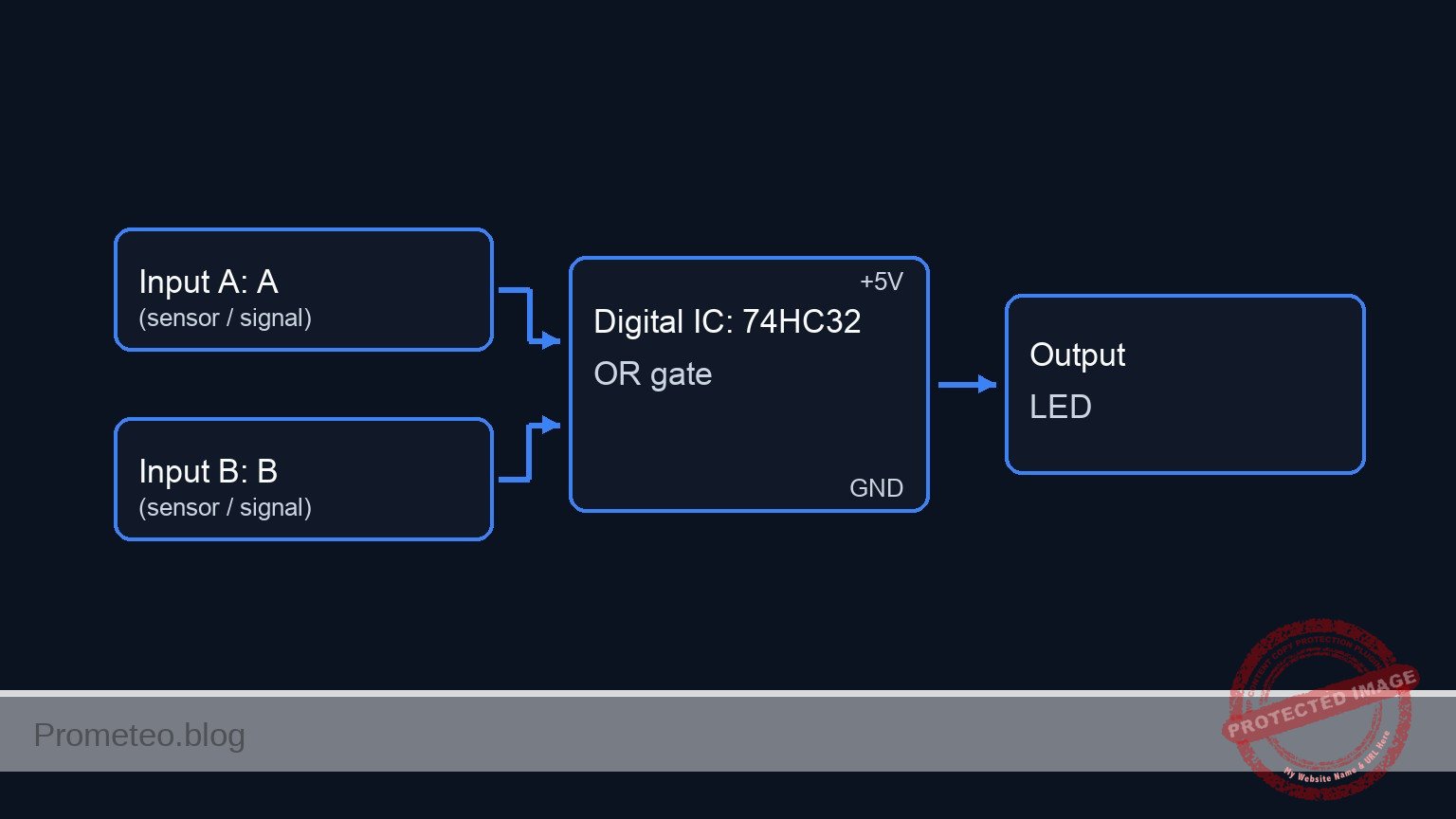
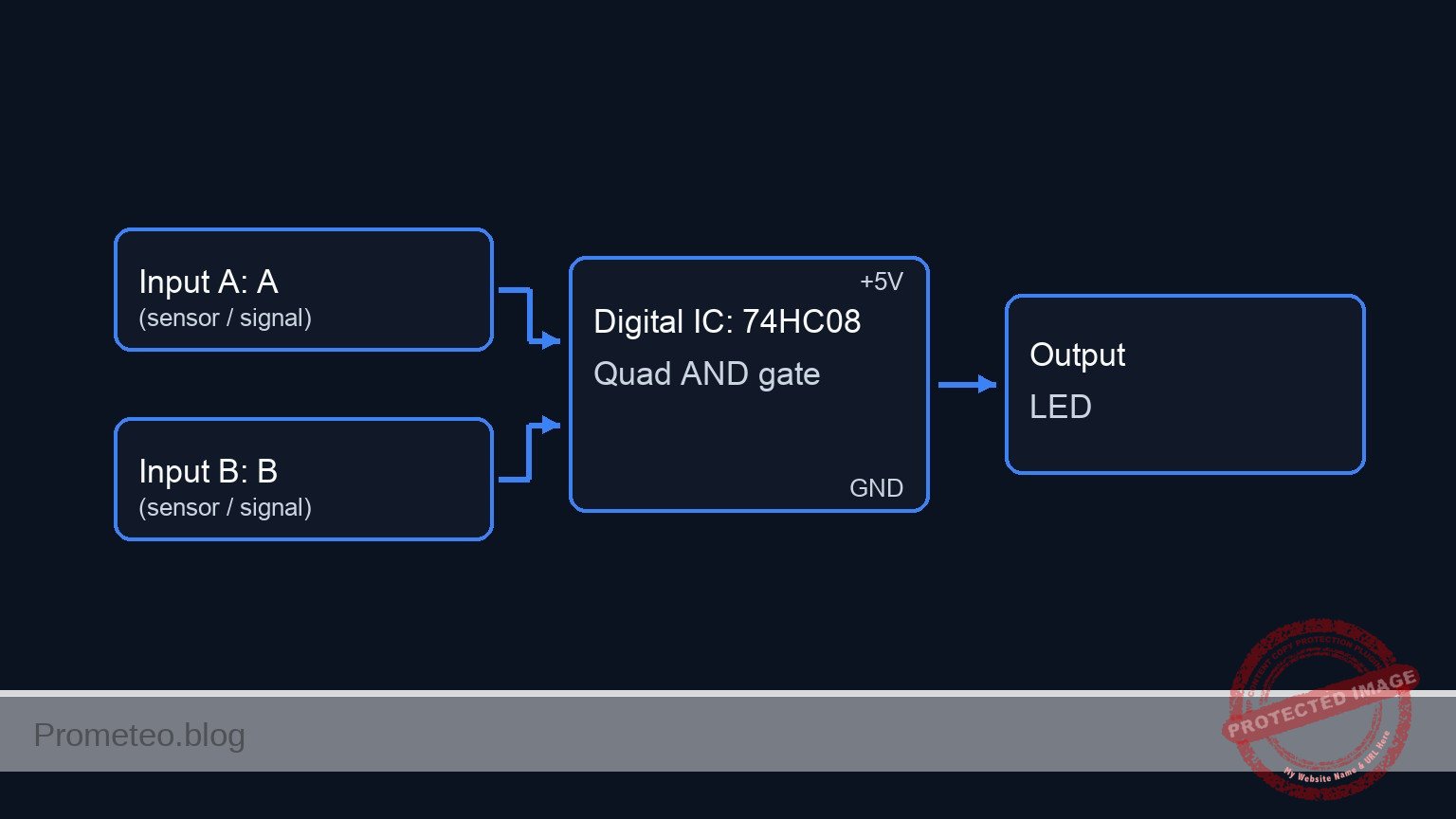
Diagrama de bloques conceptual
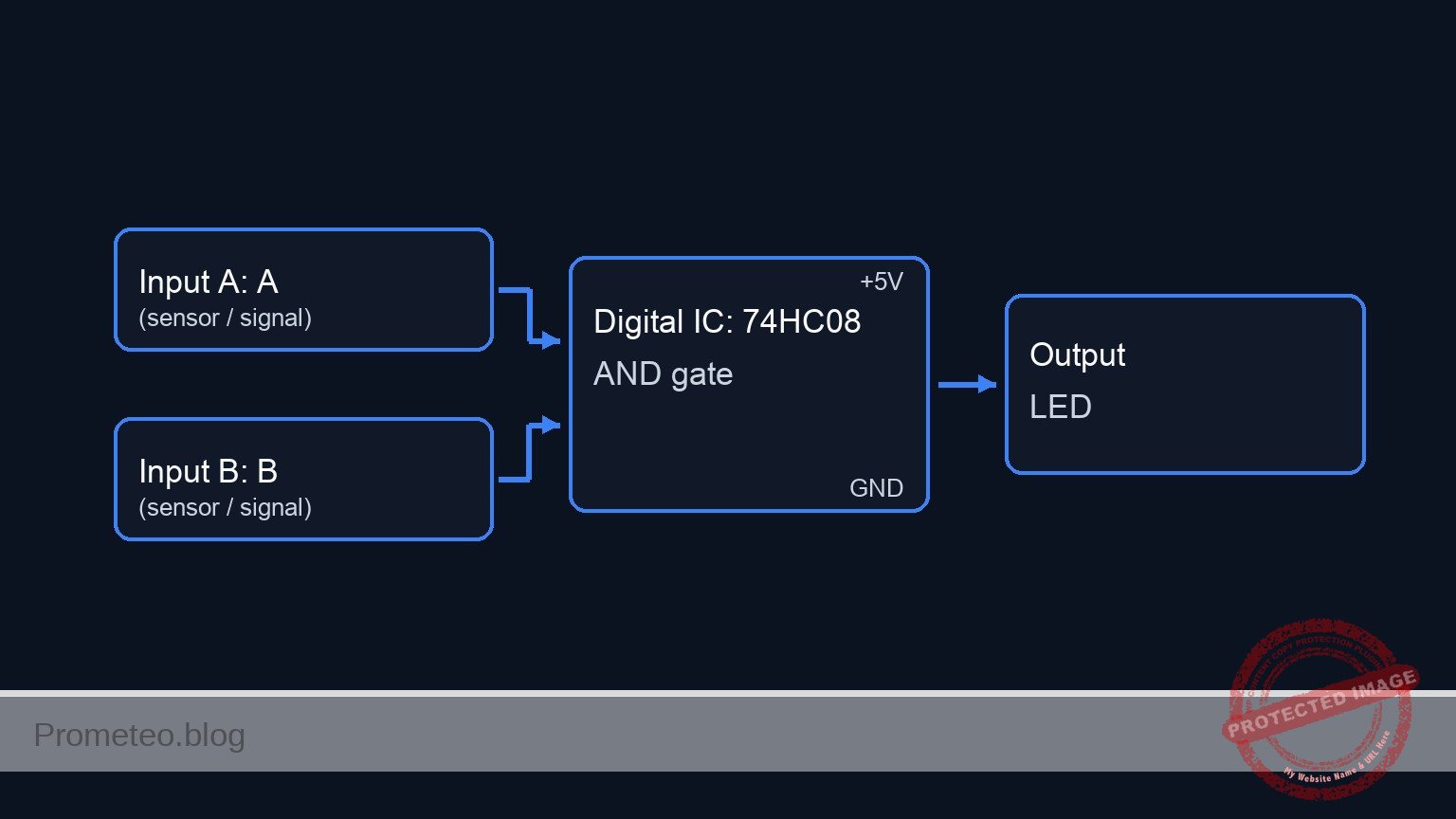
Esquemático
[ ANALOG INPUTS ] [ COMPARATORS ] [ LOGIC GATE ] [ OUTPUT ]
[ Temp Sensor (RT1/R1) ] --(V_TEMP)---->+------------------+
| U2: Comparator A |
| (LM393) |--(LOGIC_T)-->+
[ Temp Ref Pot (RP2) ] --(V_REF_T)--->| w/ Pull-up R2 | |
+------------------+ |
v
+----------------+
| U1: AND Gate |
| (74HC08) |--(ALERT)--> [ Resistor R4 ] --> [ LED D1 ] --> GND
+----------------+
^
+------------------+ |
[ Press Sensor (RP1) ] --(V_PRESS)--->| U2: Comparator B | |
| (LM393) |--(LOGIC_P)-->+
[ Press Ref Pot (RP3) ] --(V_REF_P)--->| w/ Pull-up R3 |
+------------------+
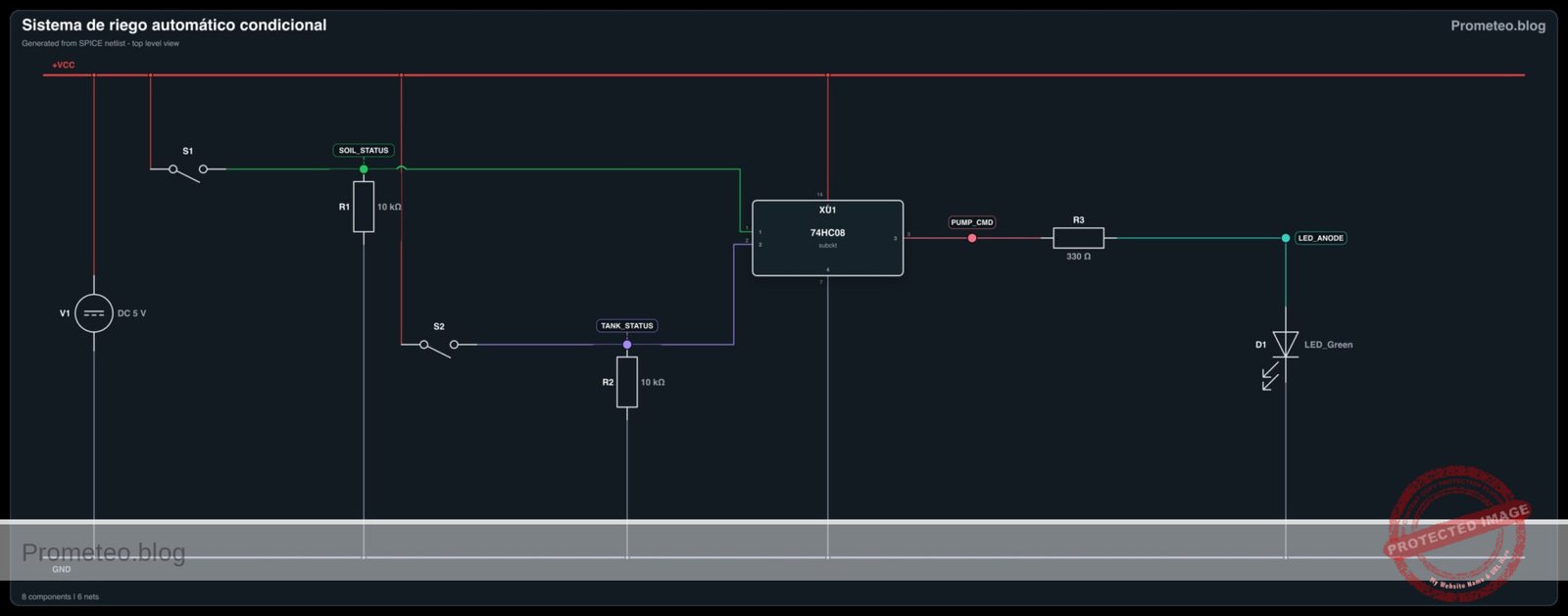
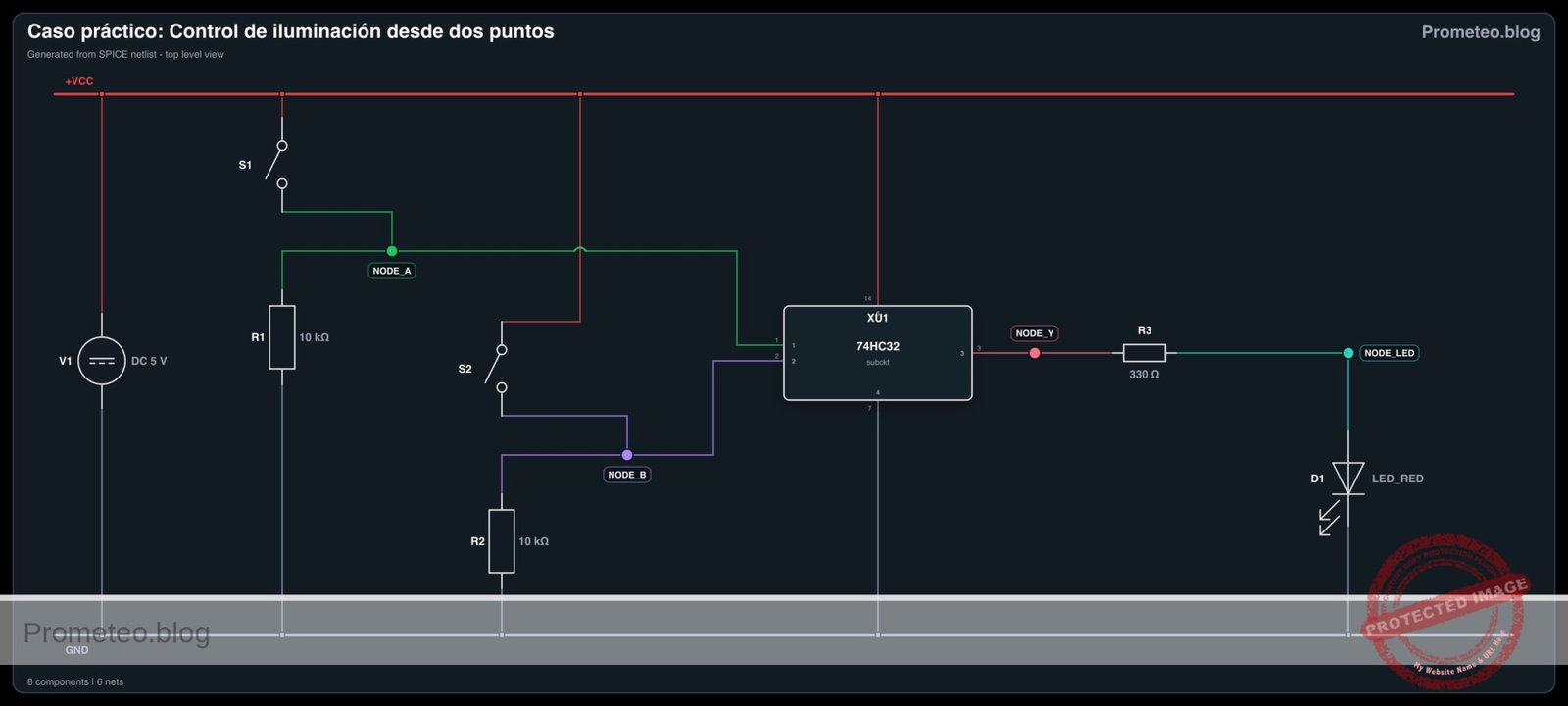
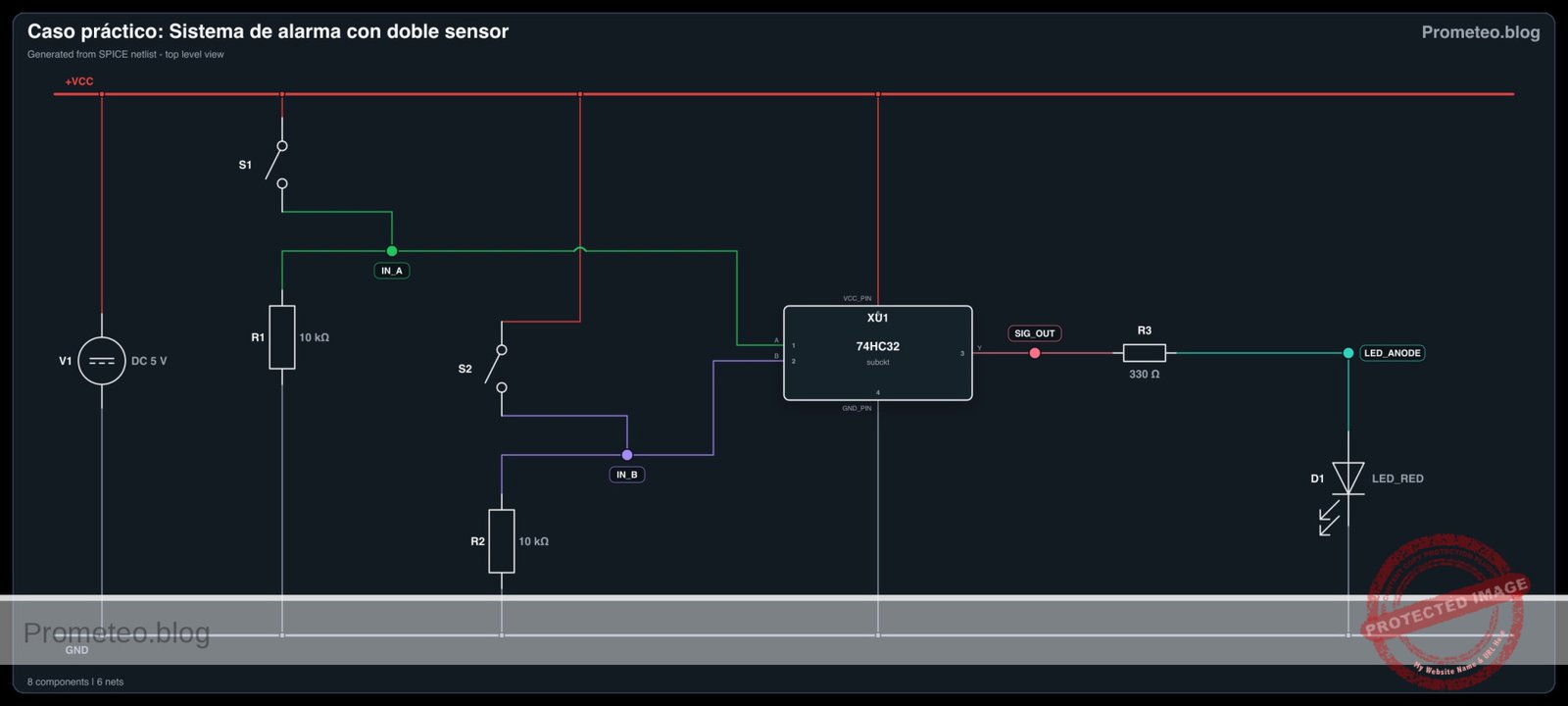
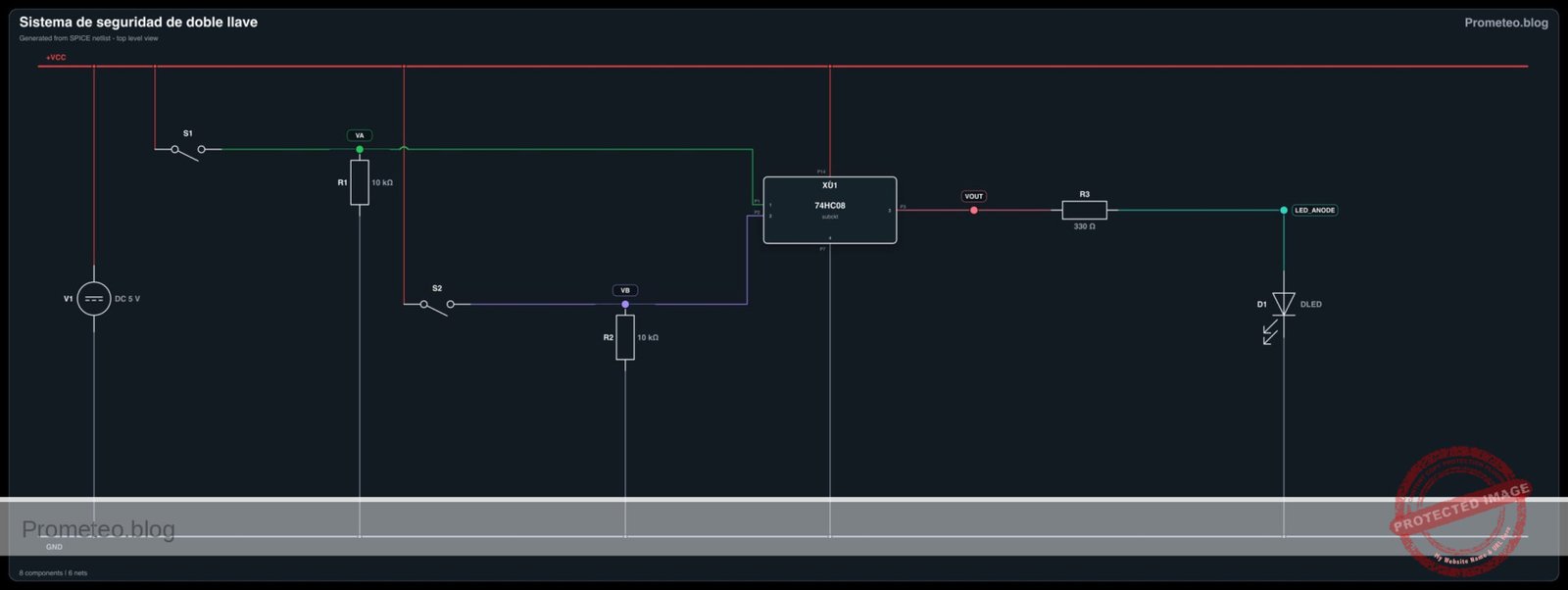
Diagrama eléctrico
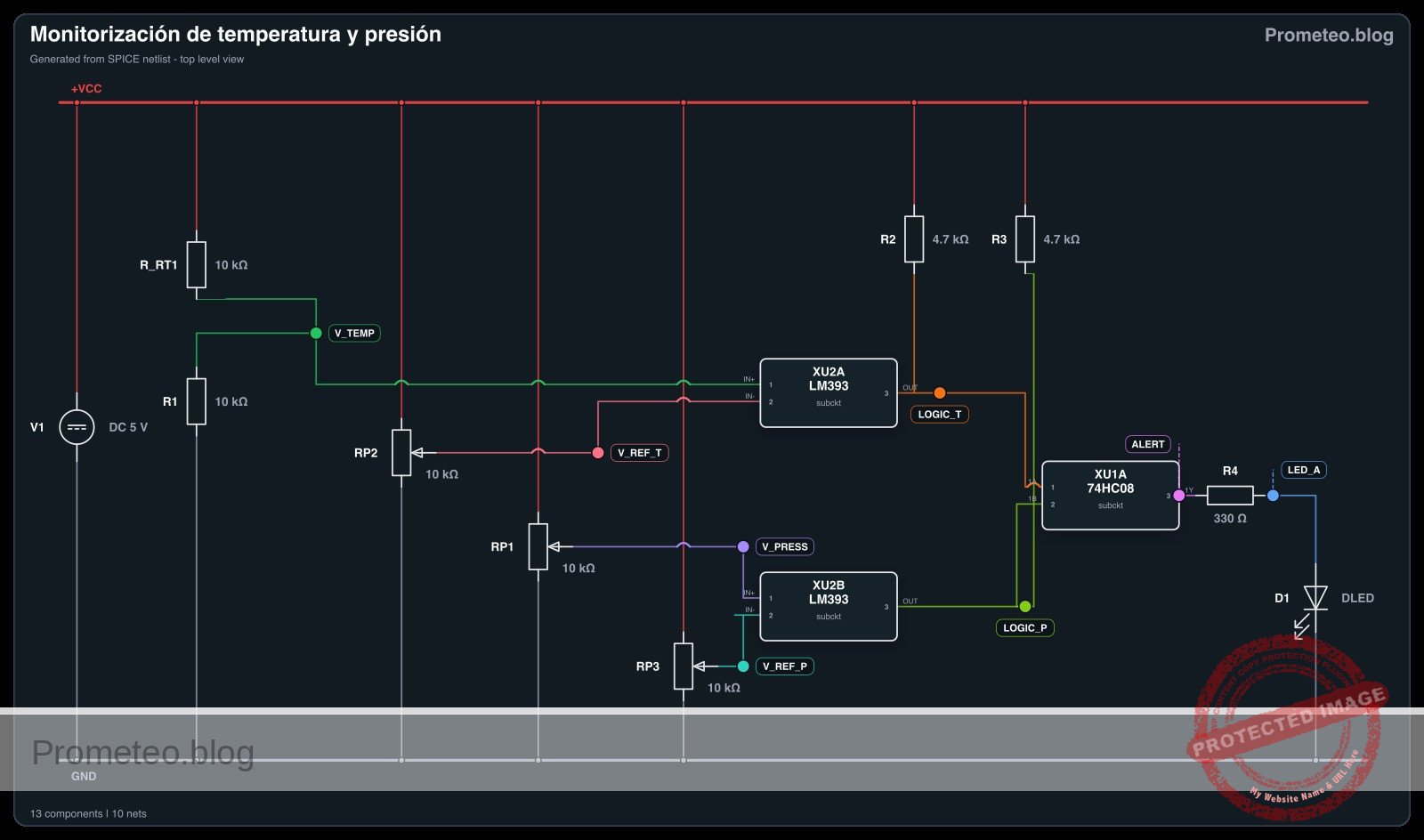
Tabla de verdad
Esta tabla representa los estados lógicos en las entradas del 74HC08 (después de la etapa de comparador) y la salida final.
| Sensor: Temperatura | Sensor: Presión | Entrada 1A (Alerta Temp) | Entrada 1B (Alerta Pres) | Salida 1Y (Alarma Sistema) | Estado LED |
|---|---|---|---|---|---|
| Bajo (< Ref) | Bajo (< Ref) | 0 | 0 | 0 | APAGADO |
| Bajo (< Ref) | Alto (> Ref) | 0 | 1 | 0 | APAGADO |
| Alto (> Ref) | Bajo (< Ref) | 1 | 0 | 0 | APAGADO |
| Alto (> Ref) | Alto (> Ref) | 1 | 1 | 1 | ENCENDIDO |
Mediciones y pruebas
- Calibrar umbrales: Usa un voltímetro para ajustar
V_REF_T(en el cursor deRP2) a 3.0V yV_REF_P(en el cursor deRP3) a 3.0V. - Prueba de lógica de temperatura: Calienta
RT1(o simúlalo cortocircuitando R1 ligeramente) hasta queV_TEMP> 3.0V. MideLOGIC_T; debería ser Alto (~5V). Verifica que el LED esté APAGADO (ya que la Presión es Baja). - Prueba de lógica de presión: Gira
RP1hasta queV_PRESS> 3.0V. MideLOGIC_P; debería ser Alto (~5V). - Prueba de alerta del sistema: Crea una condición donde
V_TEMP> 3.0V YV_PRESS> 3.0V simultáneamente.- Mide el voltaje en
ALERT(Pin 3 de U1): Esperado ~5V. - Visual: El LED rojo
D1debe ENCENDERSE.
- Mide el voltaje en
Netlist SPICE y simulación
Netlist SPICE de referencia (ngspice) — extractoNetlist SPICE completo (ngspice)
* Practical case: Temperature and Pressure Monitoring
* --- Power Supply ---
* V1: 5 V DC supply
V1 VCC 0 DC 5
* --- Sensors and Inputs ---
* Temperature Sensor (RT1 NTC + R1 Divider)
* RT1: 10 kΩ NTC thermistor (Modeled as R_RT1)
* Connected between VCC and V_TEMP
R_RT1 VCC V_TEMP 10k
* R1: 10 kΩ resistor (Voltage divider bottom)
* Connected between V_TEMP and 0 (GND)
R1 V_TEMP 0 10k
* Pressure Sensor (RP1 Potentiometer)
* RP1: 10 kΩ linear potentiometer
* Modeled as two resistors (Top/Bot) representing the wiper position.
* Outer legs to VCC and 0, wiper to V_PRESS.
R_RP1_TOP VCC V_PRESS 5k
R_RP1_BOT V_PRESS 0 5k
* --- Dynamic Stimuli (Simulation) ---
* These voltage sources drive the sensor nodes to simulate physical changes
* over time, verifying the logic thresholds (sweeping 1V to 4V).
* They effectively override the static resistor dividers for transient analysis.
V_TEMP_STIM V_TEMP 0 PULSE(1 4 0.5m 100u 100u 1m 3m)
V_PRESS_STIM V_PRESS 0 PULSE(1 4 1m 100u 100u 1.5m 4m)
* --- Reference Thresholds ---
* ... (truncated in public view) ...Copia este contenido en un archivo .cir y ejecútalo con ngspice.
* Practical case: Temperature and Pressure Monitoring
* --- Power Supply ---
* V1: 5 V DC supply
V1 VCC 0 DC 5
* --- Sensors and Inputs ---
* Temperature Sensor (RT1 NTC + R1 Divider)
* RT1: 10 kΩ NTC thermistor (Modeled as R_RT1)
* Connected between VCC and V_TEMP
R_RT1 VCC V_TEMP 10k
* R1: 10 kΩ resistor (Voltage divider bottom)
* Connected between V_TEMP and 0 (GND)
R1 V_TEMP 0 10k
* Pressure Sensor (RP1 Potentiometer)
* RP1: 10 kΩ linear potentiometer
* Modeled as two resistors (Top/Bot) representing the wiper position.
* Outer legs to VCC and 0, wiper to V_PRESS.
R_RP1_TOP VCC V_PRESS 5k
R_RP1_BOT V_PRESS 0 5k
* --- Dynamic Stimuli (Simulation) ---
* These voltage sources drive the sensor nodes to simulate physical changes
* over time, verifying the logic thresholds (sweeping 1V to 4V).
* They effectively override the static resistor dividers for transient analysis.
V_TEMP_STIM V_TEMP 0 PULSE(1 4 0.5m 100u 100u 1m 3m)
V_PRESS_STIM V_PRESS 0 PULSE(1 4 1m 100u 100u 1.5m 4m)
* --- Reference Thresholds ---
* RP2: 10 kΩ potentiometer (Temperature Reference)
* Configured as divider, wiper to V_REF_T. Set to ~2.5V.
R_RP2_TOP VCC V_REF_T 5k
R_RP2_BOT V_REF_T 0 5k
* RP3: 10 kΩ potentiometer (Pressure Reference)
* Configured as divider, wiper to V_REF_P. Set to ~2.5V.
R_RP3_TOP VCC V_REF_P 5k
R_RP3_BOT V_REF_P 0 5k
* --- Comparator Stage (U2: LM393) ---
* U2: Dual Differential Comparator
* Connections based on Wiring Guide:
* Comp A (Temp): In+ (3)=V_TEMP, In- (2)=V_REF_T, Out (1)=LOGIC_T
* Comp B (Press): In+ (5)=V_PRESS, In- (6)=V_REF_P, Out (7)=LOGIC_P
* Power: VCC (8), GND (4)
XU2 LOGIC_T V_REF_T V_TEMP 0 V_PRESS V_REF_P LOGIC_P VCC LM393
* Pull-up resistors (Required for Open Collector Outputs)
* R2: 4.7 kΩ pull-up for Comparator A
R2 VCC LOGIC_T 4.7k
* R3: 4.7 kΩ pull-up for Comparator B
R3 VCC LOGIC_P 4.7k
* --- Logic Stage (U1: 74HC08) ---
* U1: Quad 2-Input AND Gate
* Connections:
* Gate 1: Input 1A (1)=LOGIC_T, Input 1B (2)=LOGIC_P, Output 1Y (3)=ALERT
* Power: VCC (14), GND (7)
* Unused inputs (4,5,9,10,12,13) connected to 0 (GND) to prevent floating.
XU1 LOGIC_T LOGIC_P ALERT 0 0 0 0 0 0 0 0 0 0 VCC 74HC08
* --- Indicator ---
* R4: 330 Ω resistor (LED current limiting)
R4 ALERT LED_A 330
* D1: Red LED (Cathode to GND)
D1 LED_A 0 DLED
* --- Models and Subcircuits ---
* LED Model
.model DLED D(IS=1e-14 N=1.7 RS=10)
* LM393 Subcircuit (Behavioral Open Collector)
.subckt LM393 1 2 3 4 5 6 7 8
* Pinout: 1=OutA, 2=InA-, 3=InA+, 4=GND, 5=InB+, 6=InB-, 7=OutB, 8=VCC
* Logic: If In+ > In-, Output is High-Z (Pull-up High).
* If In+ < In-, Output is Low (GND).
* Implementation uses Voltage Controlled Switch to GND.
* Control V = In(-) - In(+). If V > 0 (In- > In+), Switch Closed (Low).
B_A_CTRL 10 0 V = V(2) - V(3)
S_A 1 4 10 0 SW_OC
B_B_CTRL 20 0 V = V(6) - V(5)
S_B 7 4 20 0 SW_OC
.model SW_OC SW(Vt=0 Vh=1m Ron=10 Roff=100Meg)
.ends LM393
* 74HC08 Subcircuit (Behavioral AND Gate)
.subckt 74HC08 1 2 3 4 5 6 7 8 9 10 11 12 13 14
* Pinout: 1=1A, 2=1B, 3=1Y, 7=GND, 14=VCC ...
* Gate 1 Logic: Output High (VCC) if V(1)>2.5 and V(2)>2.5
B_Y1 3 7 V = V(14) * (1 / (1 + exp(-50*(V(1)-2.5)))) * (1 / (1 + exp(-50*(V(2)-2.5))))
.ends 74HC08
* --- Simulation Directives ---
.tran 10u 5ms
.print tran V(V_TEMP) V(V_PRESS) V(LOGIC_T) V(LOGIC_P) V(ALERT)
.endResultados de Simulación (Transitorio)

Show raw data table (1124 rows)
Index time v(v_temp) v(v_press) v(logic_t) 0 0.000000e+00 1.000000e+00 1.000000e+00 1.061571e-02 1 1.000000e-07 1.000000e+00 1.000000e+00 1.061571e-02 2 2.000000e-07 1.000000e+00 1.000000e+00 1.061571e-02 3 4.000000e-07 1.000000e+00 1.000000e+00 1.061571e-02 4 8.000000e-07 1.000000e+00 1.000000e+00 1.061571e-02 5 1.600000e-06 1.000000e+00 1.000000e+00 1.061571e-02 6 3.200000e-06 1.000000e+00 1.000000e+00 1.061571e-02 7 6.400000e-06 1.000000e+00 1.000000e+00 1.061571e-02 8 1.280000e-05 1.000000e+00 1.000000e+00 1.061571e-02 9 2.280000e-05 1.000000e+00 1.000000e+00 1.061571e-02 10 3.280000e-05 1.000000e+00 1.000000e+00 1.061571e-02 11 4.280000e-05 1.000000e+00 1.000000e+00 1.061571e-02 12 5.280000e-05 1.000000e+00 1.000000e+00 1.061571e-02 13 6.280000e-05 1.000000e+00 1.000000e+00 1.061571e-02 14 7.280000e-05 1.000000e+00 1.000000e+00 1.061571e-02 15 8.280000e-05 1.000000e+00 1.000000e+00 1.061571e-02 16 9.280000e-05 1.000000e+00 1.000000e+00 1.061571e-02 17 1.028000e-04 1.000000e+00 1.000000e+00 1.061571e-02 18 1.128000e-04 1.000000e+00 1.000000e+00 1.061571e-02 19 1.228000e-04 1.000000e+00 1.000000e+00 1.061571e-02 20 1.328000e-04 1.000000e+00 1.000000e+00 1.061571e-02 21 1.428000e-04 1.000000e+00 1.000000e+00 1.061571e-02 22 1.528000e-04 1.000000e+00 1.000000e+00 1.061571e-02 23 1.628000e-04 1.000000e+00 1.000000e+00 1.061571e-02 ... (1100 more rows) ...
Errores comunes y cómo evitarlos
- Falta de resistencias pull-up en comparadores: El LM393 tiene salidas de colector abierto. Si omites
R2yR3, las entradas al 74HC08 quedarán flotantes o permanecerán bajas, impidiendo que el circuito funcione. Solución: Instala siempre pull-ups (4.7kΩ a 10kΩ) desde el pin de salida a VCC. - Conexionado incorrecto del NTC: Conectar el NTC a tierra y la resistencia fija a VCC crea un voltaje que cae a medida que la temperatura sube. Solución: Conecta el NTC a VCC y la resistencia fija a Tierra para asegurar que el voltaje aumente con la temperatura, coincidiendo con la lógica del comparador no inversor.
- Entradas flotantes en el 74HC08: Dejar entradas no utilizadas en el chip lógico conectadas a nada puede causar ruido y mayor consumo de energía. Solución: Conecta las entradas no utilizadas (por ejemplo, pines 4, 5, 9, 10, 12, 13) a GND.
Solución de problemas
- El LED nunca se ENCIENDE: Comprueba si faltan
R2oR3. Sin ellas, las entradas de la puerta AND ven un 0 lógico. Verifica la orientación del LED. - El LED está siempre ENCENDIDO: Comprueba
RP2yRP3. Si el voltaje de referencia está ajustado a 0V, los sensores siempre parecerán «Altos» en relación con la referencia. - LED errático/parpadeante: El voltaje en las entradas del comparador podría estar oscilando exactamente en el umbral. Esto crea ruido. Añadir una resistencia de retroalimentación de histéresis puede solucionar esto, pero asegurar conexiones de alimentación limpias suele ser suficiente para pruebas básicas.
Posibles mejoras y extensiones
- Añadir histéresis: Conecta una resistencia de alto valor (por ejemplo, 100kΩ) entre la salida del comparador y la entrada no inversora. Esto previene el efecto de «rebote» cuando los valores del sensor oscilan cerca del umbral.
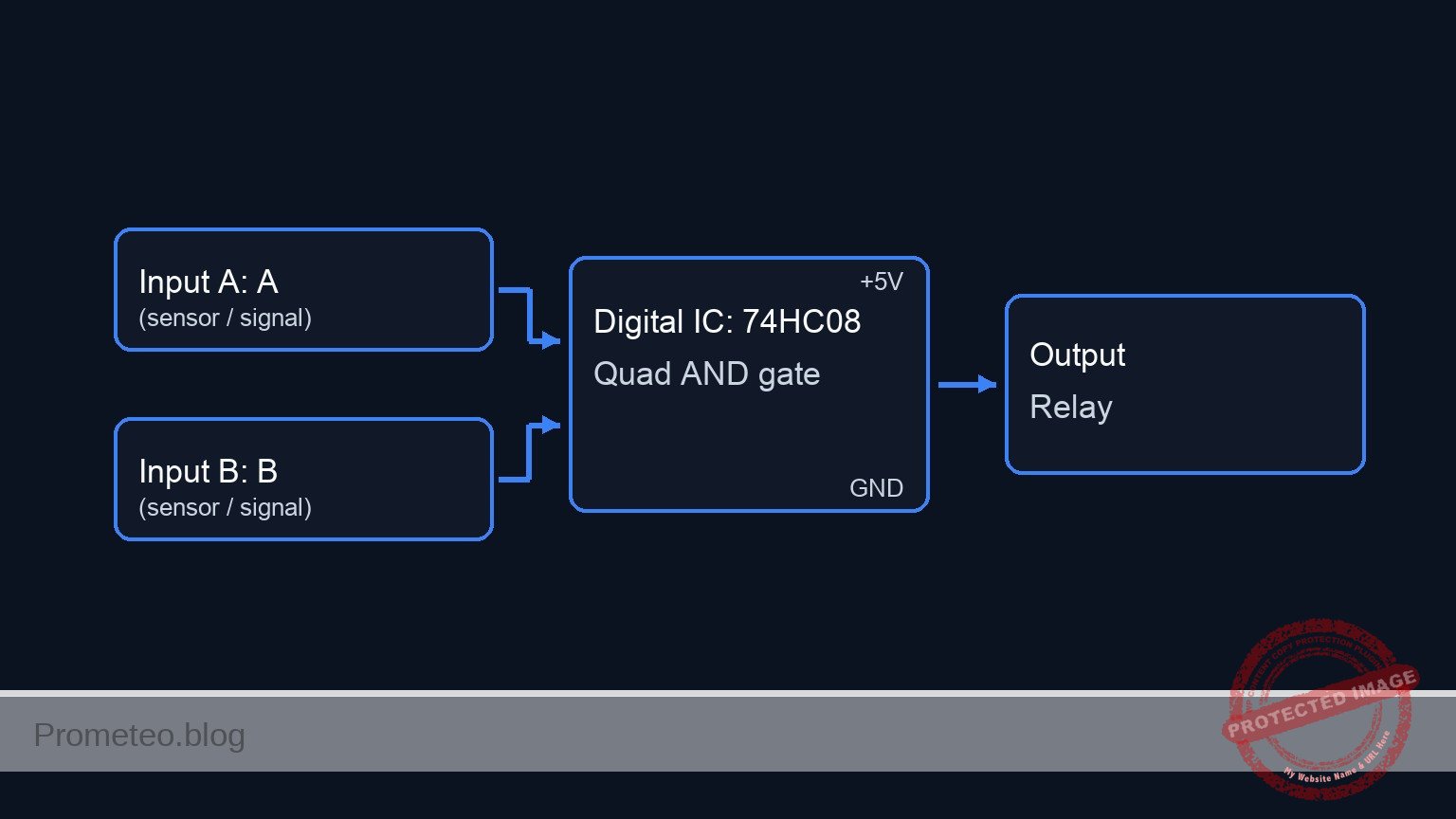
- Alarma sonora: Conecta un zumbador con un transistor driver (como un 2N2222) a la salida del 74HC08 junto con el LED para una advertencia audible en un entorno industrial ruidoso.
Más Casos Prácticos en Prometeo.blog
Encuentra este producto y/o libros sobre este tema en Amazon
Como afiliado de Amazon, gano con las compras que cumplan los requisitos. Si compras a través de este enlace, ayudas a mantener este proyecto.
Quiz rápido

Ingeniero Superior en Electrónica de Telecomunicaciones e Ingeniero en Informática (titulaciones oficiales en España).