Objetivo y caso de uso
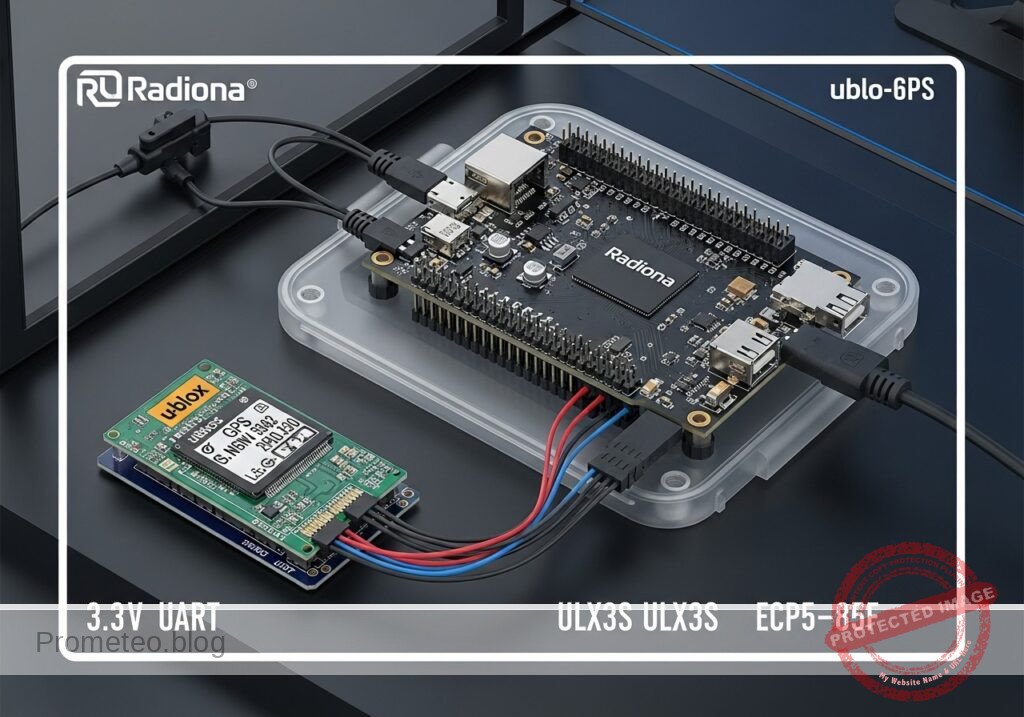
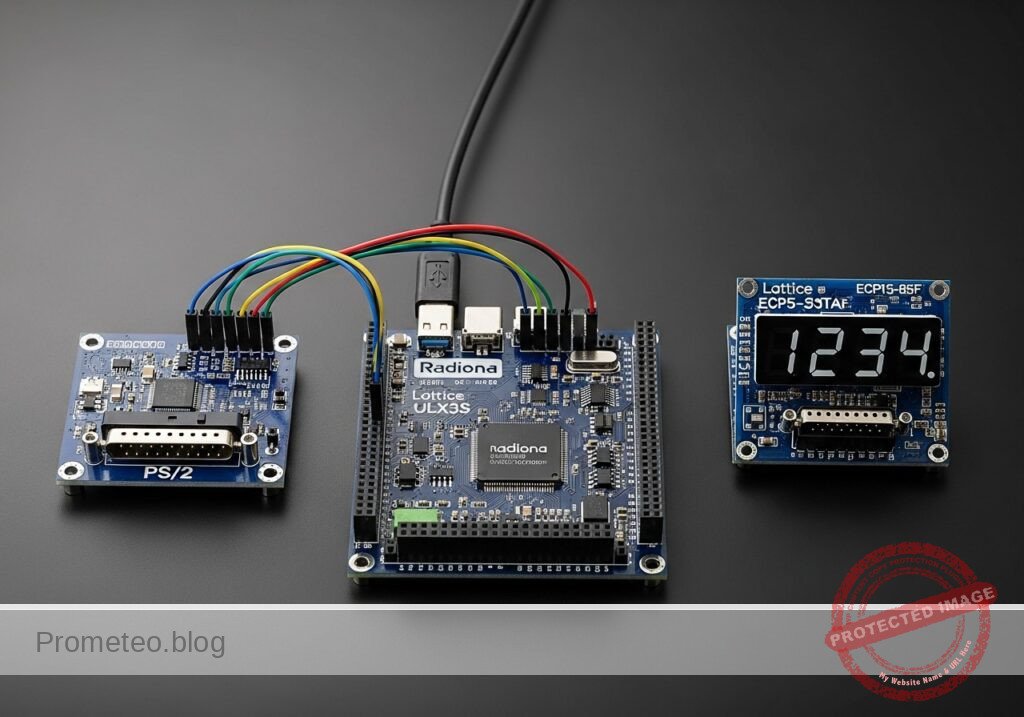
Qué construirás: Un detector compacto de ráfagas de actividad de voz en FPGA sobre una Radiona ULX3S (Lattice ECP5-85F) usando un micrófono MEMS I2S INMP441. Una ráfaga hablada corta y fuerte como “go” o “stop” conmuta una salida de estado de banco entre RUN y STOP con baja latencia y lógica completamente local.
Por qué importa / Casos de uso
- Control de estado manos libres mientras sueldas, mides con puntas o sostienes piezas con ambas manos ocupadas.
- Señalización clara en el banco: un LED para RUN, uno para STOP, más un LED de actividad que reacciona a la energía de audio detectada.
- Indicación compartida en laboratorio sin PC, SO ni pila de red, manteniendo el tiempo de respuesta predecible y típicamente por debajo de 50–100 ms desde la ráfaga hasta el cambio de estado.
- Entrenamiento práctico en FPGA sobre captura I2S de 24 bits, extracción de envolvente, umbralización, temporización de antirrebote/confirmación y bloqueo de eventos usando solo una pequeña fracción de los recursos del ECP5.
Resultado esperado
- La FPGA muestrea audio I2S de 24 bits desde el INMP441, lo convierte en una envolvente de amplitud simple y marca ráfagas por encima de un umbral configurable.
- Una ráfaga hablada corta cerca del micrófono activa una transición de estado solo después de una ventana de confirmación, reduciendo conmutaciones falsas por ruido de fondo o golpes en el banco.
- Tres LEDs proporcionan realimentación inmediata: RUN, STOP y actividad de audio, con comportamiento de conmutación estable y un intervalo de bloqueo configurable entre eventos.
- La simulación demuestra rechazo al silencio, detección de ráfagas, temporización de bloqueo y conmutación correcta RUN/STOP, con objetivos prácticos de ajuste como latencia de detección por debajo de 100 ms y baja carga de FPGA.
Audiencia: Estudiantes intermedios de FPGA con experiencia básica en diseño digital y herramientas de línea de comandos; Nivel: Intermedio
Arquitectura/flujo: Micrófono I2S INMP441 → receptor de reloj de bits/selección de palabra → captura de muestras de 24 bits → medición de valor absoluto/envolvente → umbral + contador de confirmación → máquina de estados de bloqueo/conmutación → LEDs RUN/STOP/audio.
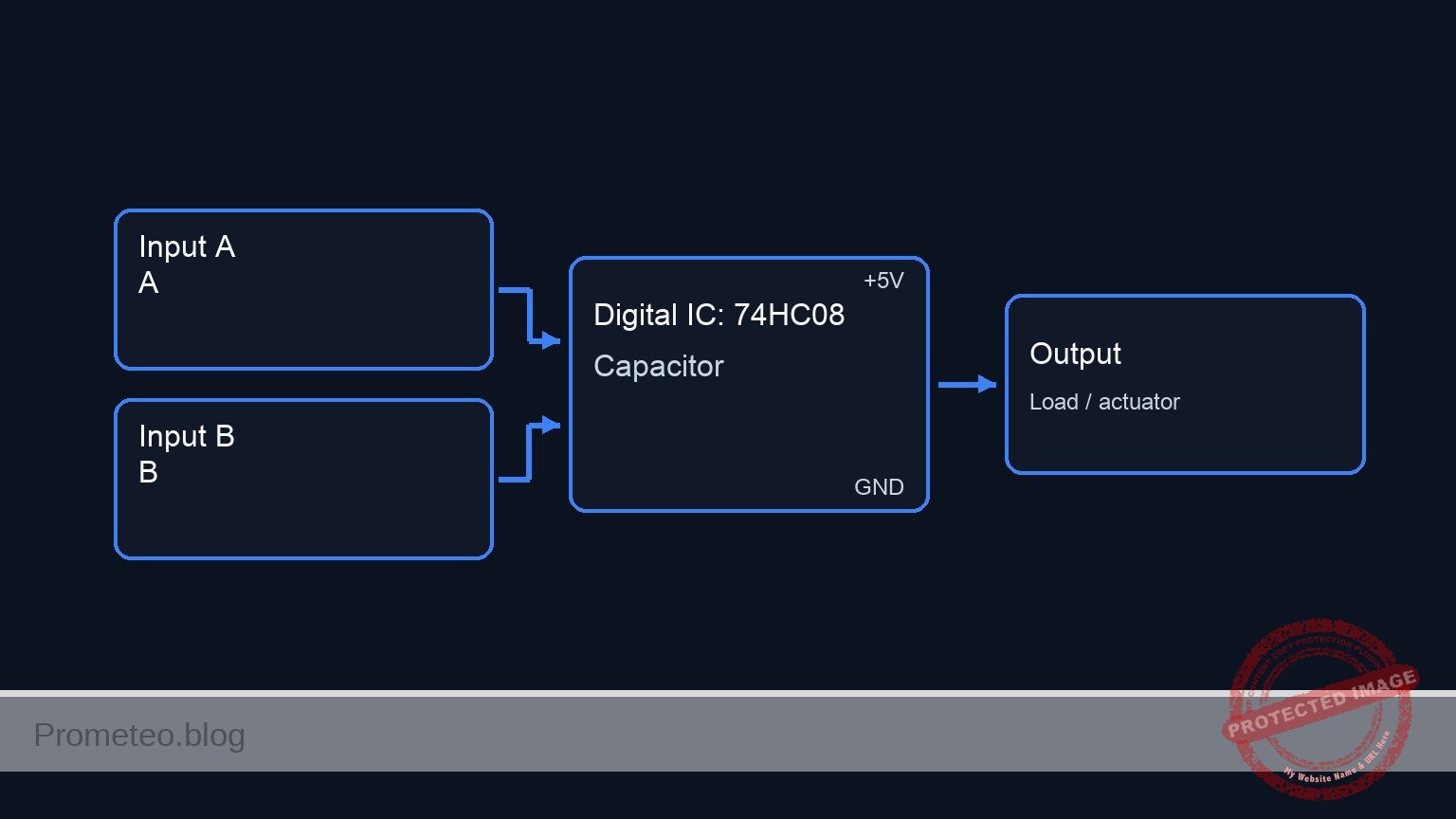
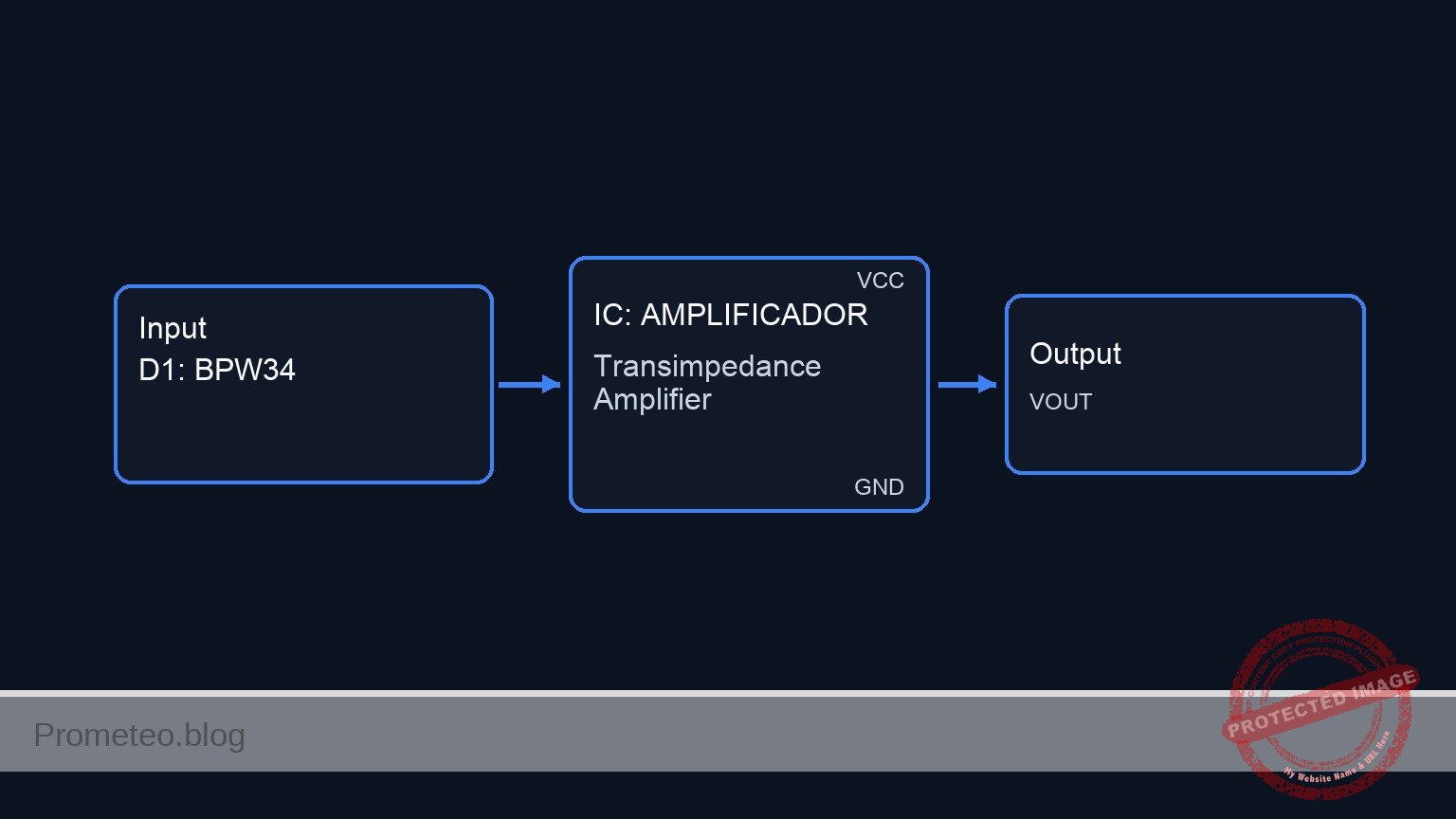
Diagrama de bloques conceptual
Vista de alto nivel: qué entra, qué procesa cada bloque y qué sale del sistema.
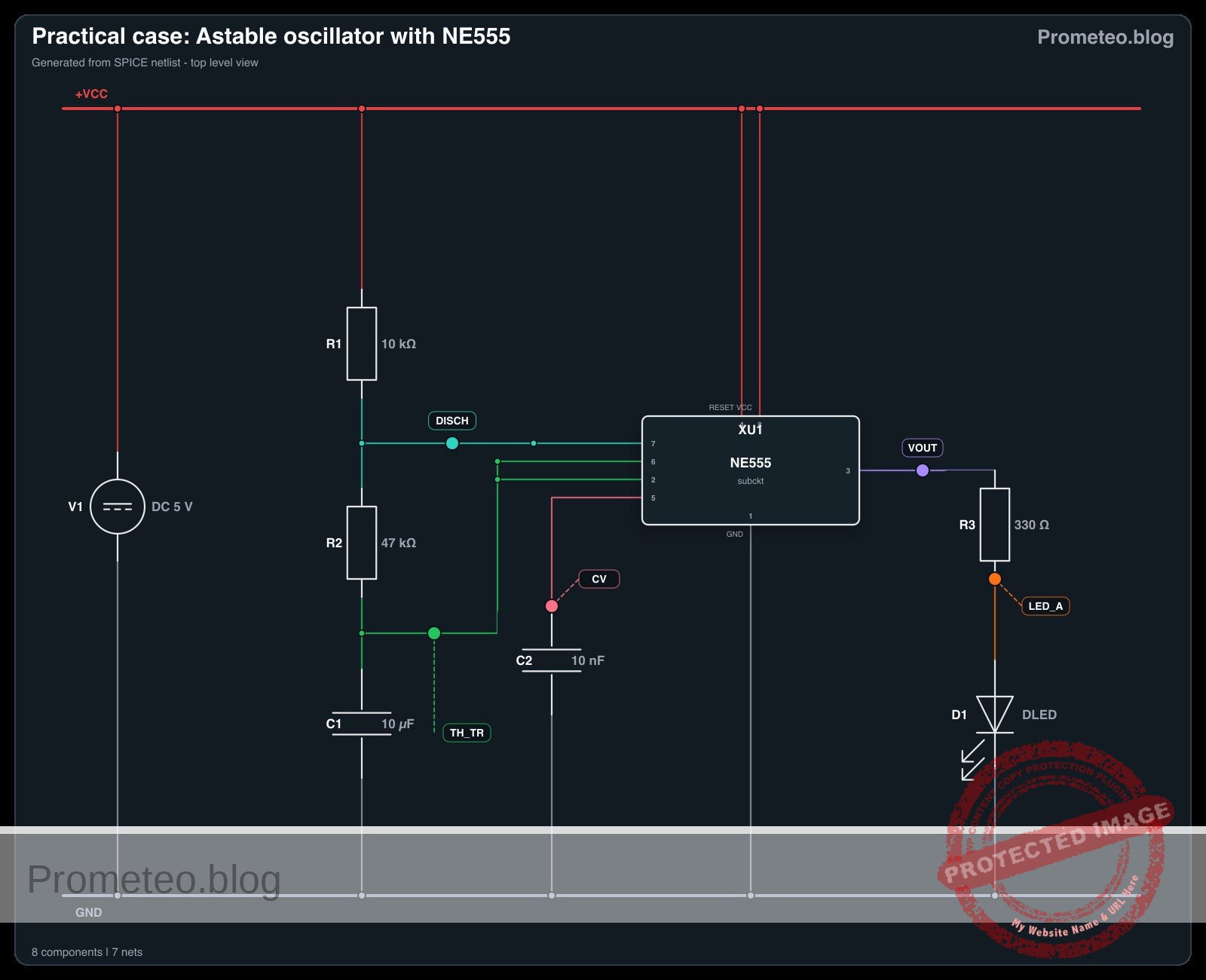
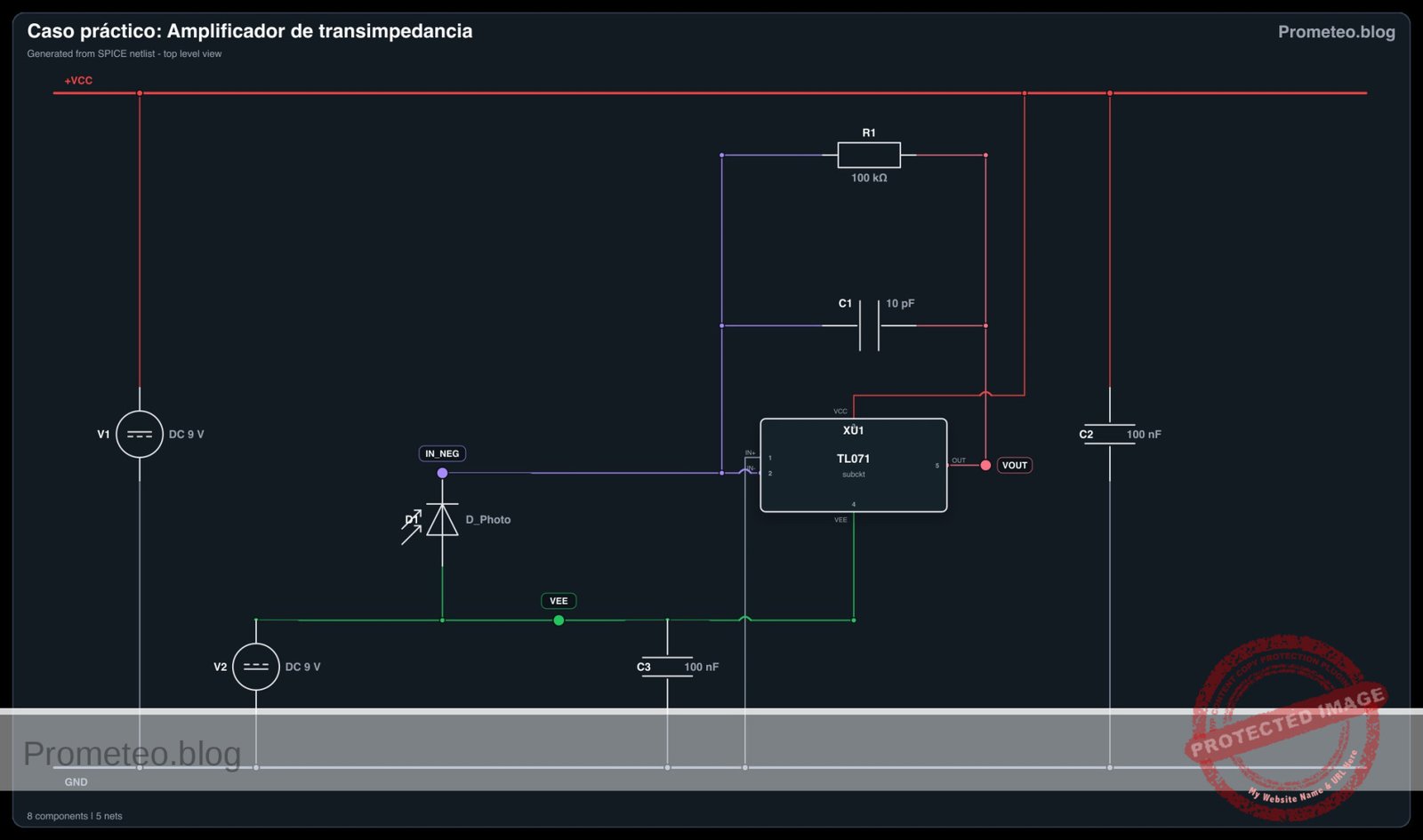
Arquitectura funcional
Flujo conceptual de señales y responsabilidades entre bloques del dispositivo.

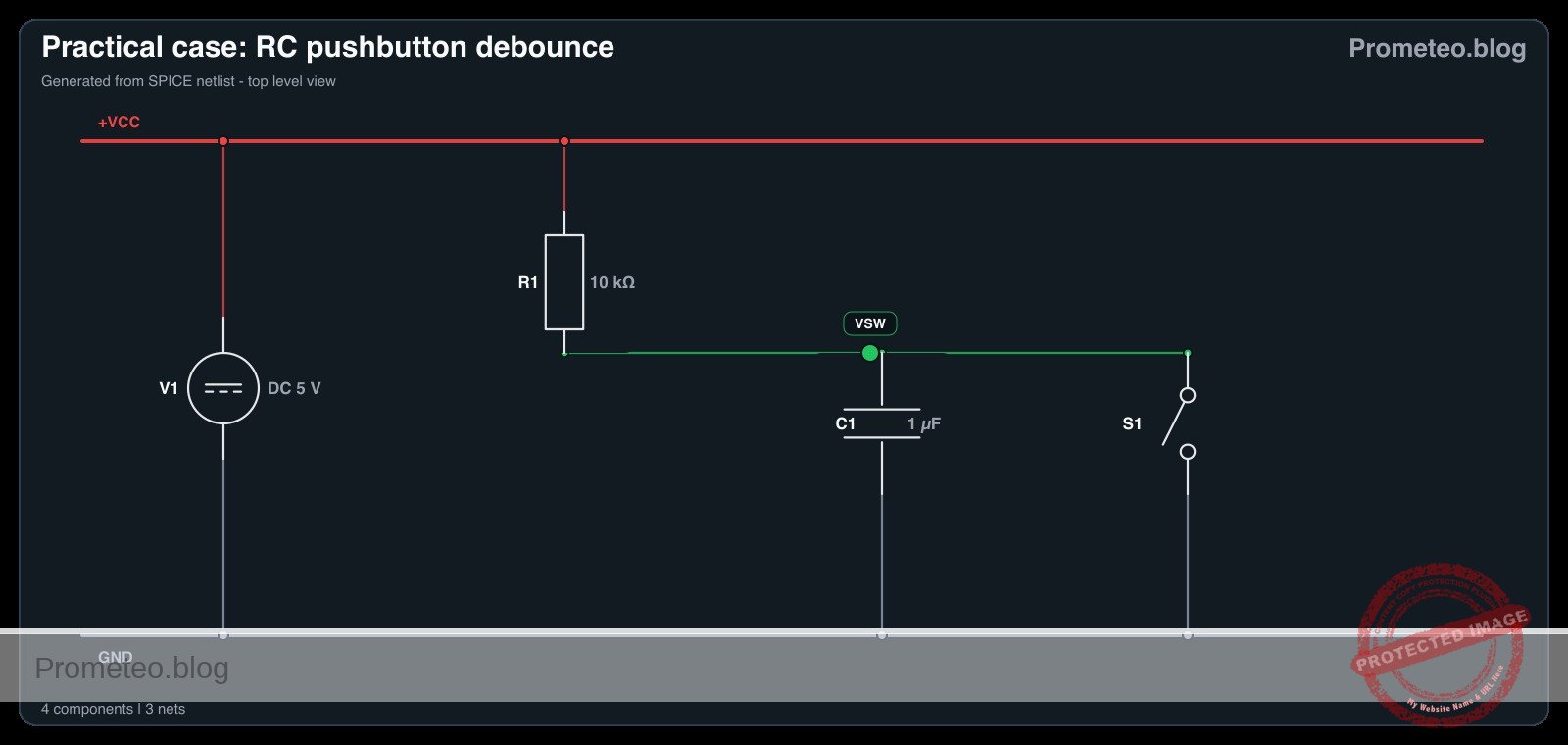
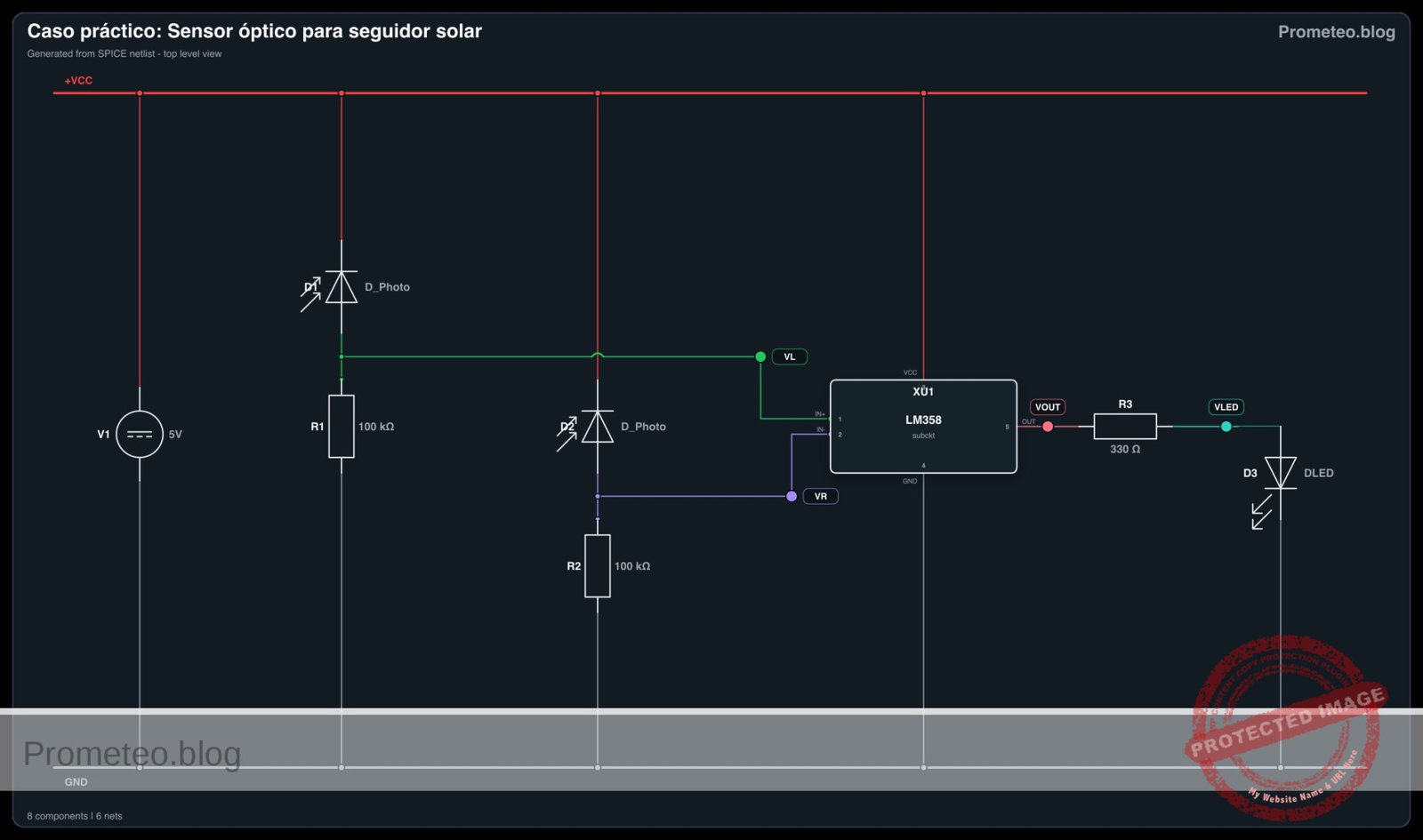
Ruta de validación
Resumen conceptual de las herramientas usadas para comprobar el material publicado.

Requisitos previos
Deberías sentirte cómodo con:
- Conceptos básicos de FPGA:
- relojes
- lógica síncrona
- contadores
- máquinas de estados
- Verilog básico:
- módulos
- registros y wires
- bloques always
- parámetros
- Herramientas de compilación por línea de comandos en Linux
- Programación por USB de la placa ULX3S
Software recomendado:
yosysnextpnr-ecp5ecppackopenFPGALoaderverilator
Limitación importante:
- Este proyecto no es reconocimiento de voz.
- Es un detector simple de eventos de voz fuerte ajustado para aproximar ráfagas tipo comando mediante reglas de umbral, duración y enfriamiento.
- No identifica palabras habladas de forma fiable en entornos ruidosos.
Materiales
Hardware exacto
Usa exactamente:
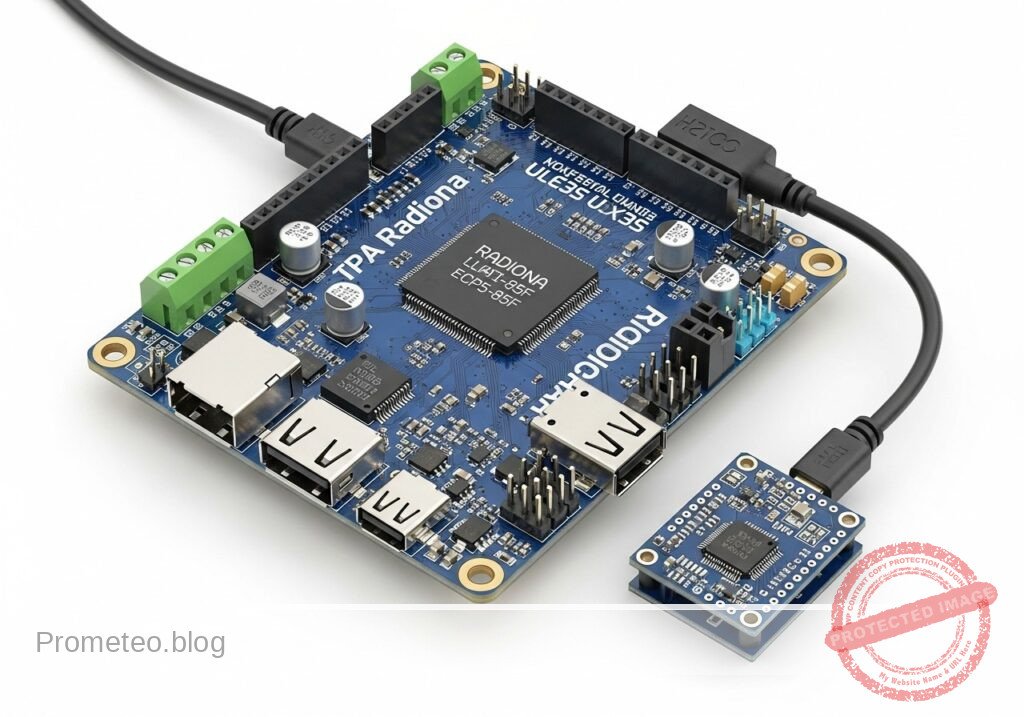
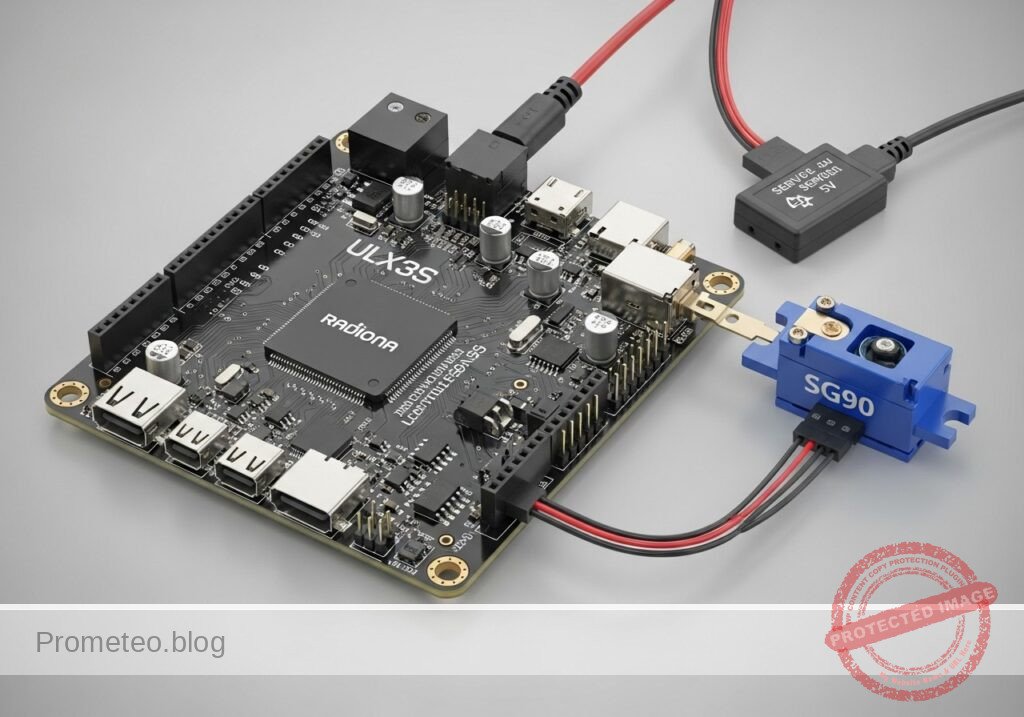
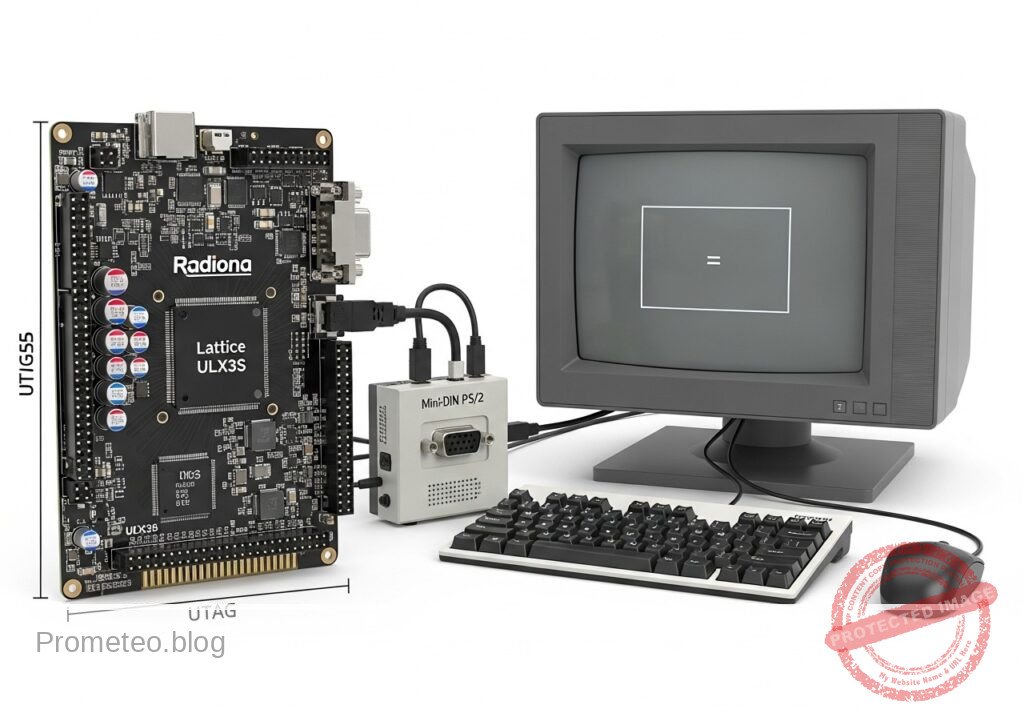
- Radiona ULX3S (Lattice ECP5-85F)
- Micrófono MEMS I2S INMP441
- LEDs de estado (integrados en la placa o externos)
Elementos adicionales
- Cable USB para programación y alimentación de la ULX3S
- Cables jumper para protoboard
- Multímetro u osciloscopio opcional para comprobar señales
- Un área razonablemente silenciosa para el ajuste inicial
Por qué este hardware encaja
- La ULX3S ECP5-85F tiene suficiente lógica para una pequeña etapa frontal de audio sin IP del fabricante.
- El INMP441 expone una interfaz digital estándar I2S.
- Los LEDs proporcionan realimentación inmediata de hardware sin software adicional.
Configuración y conexión
Señales del INMP441
Pines típicos del INMP441:
VDDGNDSCKoBCLKWSoLRCLKSDL/R
El micrófono normalmente es un esclavo I2S, por lo que la FPGA debe generar:
- reloj de bits
- selección de palabra
Y la FPGA debe muestrear:
- datos serie
Alimentación y niveles lógicos
El INMP441 usa lógica y alimentación de 3.3 V. Usa solo 3.3 V con el micrófono.
Resumen de conexiones
| Función | Pin INMP441 | Nombre de señal FPGA ULX3S | Dirección | Notas |
|---|---|---|---|---|
| Alimentación | VDD | 3V3 | Placa -> micrófono | Usar solo 3.3 V |
| Tierra | GND | GND | Común | Se requiere tierra compartida |
| Reloj de bits | SCK/BCLK | mic_bclk |
FPGA -> micrófono | Generado por la FPGA |
| Selección de palabra | WS/LRCLK | mic_ws |
FPGA -> micrófono | Generada por la FPGA |
| Datos serie | SD | mic_sd |
Micrófono -> FPGA | Muestreado por la FPGA |
| Selección de canal | L/R | GND o 3V3 | Estático | Selecciona un canal |
| LED RUN | LED | led_run |
FPGA -> LED | ON cuando está en ejecución |
| LED STOP | LED | led_stop |
FPGA -> LED | ON cuando está detenido |
| LED de actividad | LED | led_activity |
FPGA -> LED | ON durante actividad de audio |
Notas de cableado
- Conecta
VDDa 3.3 V, no a 5 V. - Conecta la tierra entre la placa y el micrófono.
- Fija
L/Ra un nivel lógico definido. En este tutorial, usa GND para seleccionar el canal izquierdo. - Mantén los cables cortos.
- Si el cableado de tus LED es activo en bajo, inviértelo en el HDL o en las restricciones para que coincida con tu hardware.
Formato I2S elegido
Para este tutorial:
- Reloj de entrada de FPGA: 25 MHz
- Reloj de bits I2S: 1.5625 MHz por división entera
- Tamaño de palabra: 32 bits por canal
- Frecuencia de muestreo: aproximadamente 24.414 kHz porque
1.5625 MHz / 64 = 24.414 kHz
Esa frecuencia de muestreo es adecuada para un detector simple de estilo actividad de voz.
Archivos del proyecto
fpga-voice-led/
├── voice_led_top.v
├── tb_voice_led_top.v
└── ulx3s_voice_led.lpf
Módulo superior en Verilog
voice_led_top.v
Vista pública parcial del archivo validado. El código completo se muestra a miembros y en PDF/Print.
module voice_led_top(
input wire clk_25mhz,
input wire mic_sd,
output reg mic_bclk = 1'b0,
output reg mic_ws = 1'b0,
output wire led_run,
output wire led_stop,
output wire led_activity
);
reg [3:0] bclk_div = 4'd0;
reg bclk_prev = 1'b0;
reg [5:0] bit_count = 6'd0;
reg [5:0] slot_bit_index = 6'd0;
reg [31:0] shift_reg = 32'd0;
reg [23:0] sample_left = 24'd0;
reg sample_strobe = 1'b0;
reg [31:0] envelope = 32'd0;
reg activity = 1'b0;
reg [15:0] burst_count = 16'd0;
reg [15:0] holdoff_count = 16'd0;
reg run_state = 1'b0;
wire bclk_rise;
wire signed [23:0] signed_sample;
wire [23:0] abs_sample;
wire [31:0] envelope_next;
localparam [31:0] ENV_THRESHOLD = 32'd200000;
localparam [15:0] BURST_MIN_SAMPLES = 16'd1200;
localparam [15:0] BURST_MAX_SAMPLES = 16'd9000;
localparam [15:0] HOLDOFF_SAMPLES = 16'd18000;
assign bclk_rise = (bclk_prev == 1'b0) && (mic_bclk == 1'b1);
assign signed_sample = sample_left;
assign abs_sample = signed_sample[23] ? (~signed_sample + 24'd1) : signed_sample;
assign envelope_next = envelope - (envelope >> 4) + {8'd0, abs_sample};
always @(posedge clk_25mhz) begin
bclk_prev <= mic_bclk;
if (bclk_div == 4'd7) begin
bclk_div <= 4'd0;
mic_bclk <= ~mic_bclk;
end else begin
bclk_div <= bclk_div + 4'd1;
end
end
always @(posedge clk_25mhz) begin
sample_strobe <= 1'b0;
if (bclk_rise) begin
if (bit_count == 6'd63) begin
bit_count <= 6'd0;
// ... continúa para miembros en el código completo validado ...module voice_led_top(
input wire clk_25mhz,
input wire mic_sd,
output reg mic_bclk = 1'b0,
output reg mic_ws = 1'b0,
output wire led_run,
output wire led_stop,
output wire led_activity
);
reg [3:0] bclk_div = 4'd0;
reg bclk_prev = 1'b0;
reg [5:0] bit_count = 6'd0;
reg [5:0] slot_bit_index = 6'd0;
reg [31:0] shift_reg = 32'd0;
reg [23:0] sample_left = 24'd0;
reg sample_strobe = 1'b0;
reg [31:0] envelope = 32'd0;
reg activity = 1'b0;
reg [15:0] burst_count = 16'd0;
reg [15:0] holdoff_count = 16'd0;
reg run_state = 1'b0;
wire bclk_rise;
wire signed [23:0] signed_sample;
wire [23:0] abs_sample;
wire [31:0] envelope_next;
localparam [31:0] ENV_THRESHOLD = 32'd200000;
localparam [15:0] BURST_MIN_SAMPLES = 16'd1200;
localparam [15:0] BURST_MAX_SAMPLES = 16'd9000;
localparam [15:0] HOLDOFF_SAMPLES = 16'd18000;
assign bclk_rise = (bclk_prev == 1'b0) && (mic_bclk == 1'b1);
assign signed_sample = sample_left;
assign abs_sample = signed_sample[23] ? (~signed_sample + 24'd1) : signed_sample;
assign envelope_next = envelope - (envelope >> 4) + {8'd0, abs_sample};
always @(posedge clk_25mhz) begin
bclk_prev <= mic_bclk;
if (bclk_div == 4'd7) begin
bclk_div <= 4'd0;
mic_bclk <= ~mic_bclk;
end else begin
bclk_div <= bclk_div + 4'd1;
end
end
always @(posedge clk_25mhz) begin
sample_strobe <= 1'b0;
if (bclk_rise) begin
if (bit_count == 6'd63) begin
bit_count <= 6'd0;
end else begin
bit_count <= bit_count + 6'd1;
end
if (bit_count == 6'd31) begin
mic_ws <= 1'b1;
end else if (bit_count == 6'd63) begin
mic_ws <= 1'b0;
end
if (bit_count == 6'd31 || bit_count == 6'd63) begin
slot_bit_index <= 6'd0;
end else begin
slot_bit_index <= slot_bit_index + 6'd1;
end
shift_reg <= {shift_reg[30:0], mic_sd};
if (mic_ws == 1'b0 && slot_bit_index == 6'd23) begin
sample_left <= {shift_reg[22:0], mic_sd};
sample_strobe <= 1'b1;
end
end
end
always @(posedge clk_25mhz) begin
if (sample_strobe) begin
envelope <= envelope_next;
activity <= (envelope_next > ENV_THRESHOLD);
if (holdoff_count != 16'd0) begin
holdoff_count <= holdoff_count - 16'd1;
burst_count <= 16'd0;
end else begin
if (envelope_next > ENV_THRESHOLD) begin
if (burst_count != 16'hFFFF) begin
burst_count <= burst_count + 16'd1;
end
end else begin
if (burst_count >= BURST_MIN_SAMPLES &&
burst_count <= BURST_MAX_SAMPLES) begin
run_state <= ~run_state;
holdoff_count <= HOLDOFF_SAMPLES;
end
burst_count <= 16'd0;
end
end
end
end
assign led_run = run_state;
assign led_stop = ~run_state;
assign led_activity = activity;
endmodule
Banco de pruebas
tb_voice_led_top.v
Vista pública parcial del archivo validado. El código completo se muestra a miembros y en PDF/Print.
`timescale 1ns/1ps
module tb_voice_led_top;
reg clk_25mhz = 1'b0;
reg mic_sd = 1'b0;
wire mic_bclk;
wire mic_ws;
wire led_run;
wire led_stop;
wire led_activity;
integer i;
integer k;
reg [31:0] slot_word;
voice_led_top dut (
.clk_25mhz(clk_25mhz),
.mic_sd(mic_sd),
.mic_bclk(mic_bclk),
.mic_ws(mic_ws),
.led_run(led_run),
.led_stop(led_stop),
.led_activity(led_activity)
);
always #20 clk_25mhz = ~clk_25mhz;
task send_i2s_left_sample;
input [23:0] s;
begin
while (mic_ws !== 1'b0) begin
@(posedge mic_bclk);
end
slot_word = {s, 8'h00};
for (i = 31; i >= 0; i = i - 1) begin
@(negedge mic_bclk);
mic_sd = slot_word[i];
end
while (mic_ws !== 1'b1) begin
@(posedge mic_bclk);
end
for (i = 31; i >= 0; i = i - 1) begin
@(negedge mic_bclk);
mic_sd = 1'b0;
end
end
// ... continúa para miembros en el código completo validado ...`timescale 1ns/1ps
module tb_voice_led_top;
reg clk_25mhz = 1'b0;
reg mic_sd = 1'b0;
wire mic_bclk;
wire mic_ws;
wire led_run;
wire led_stop;
wire led_activity;
integer i;
integer k;
reg [31:0] slot_word;
voice_led_top dut (
.clk_25mhz(clk_25mhz),
.mic_sd(mic_sd),
.mic_bclk(mic_bclk),
.mic_ws(mic_ws),
.led_run(led_run),
.led_stop(led_stop),
.led_activity(led_activity)
);
always #20 clk_25mhz = ~clk_25mhz;
task send_i2s_left_sample;
input [23:0] s;
begin
while (mic_ws !== 1'b0) begin
@(posedge mic_bclk);
end
slot_word = {s, 8'h00};
for (i = 31; i >= 0; i = i - 1) begin
@(negedge mic_bclk);
mic_sd = slot_word[i];
end
while (mic_ws !== 1'b1) begin
@(posedge mic_bclk);
end
for (i = 31; i >= 0; i = i - 1) begin
@(negedge mic_bclk);
mic_sd = 1'b0;
end
end
endtask
task send_silence;
input integer n;
begin
for (k = 0; k < n; k = k + 1) begin
send_i2s_left_sample(24'd0);
end
end
endtask
task send_burst;
input integer n;
begin
for (k = 0; k < n; k = k + 1) begin
if (k[0]) begin
send_i2s_left_sample(24'h180000);
end else begin
send_i2s_left_sample(24'hE80000);
end
end
end
endtask
initial begin
$display("Starting simulation");
send_silence(3000);
$display("Initial state: led_run=%0d led_stop=%0d led_activity=%0d",
led_run, led_stop, led_activity);
send_burst(2000);
send_silence(3000);
$display("After burst 1: led_run=%0d led_stop=%0d led_activity=%0d",
led_run, led_stop, led_activity);
send_burst(1500);
send_silence(4000);
$display("After burst 2 during holdoff: led_run=%0d led_stop=%0d led_activity=%0d",
led_run, led_stop, led_activity);
send_silence(20000);
send_burst(2000);
send_silence(3000);
$display("After burst 3: led_run=%0d led_stop=%0d led_activity=%0d",
led_run, led_stop, led_activity);
$finish;
end
endmodule
Restricciones
ulx3s_voice_led.lpf
Usa ubicaciones de pines FPGA que coincidan con la revisión exacta de tu placa ULX3S y con los pines del encabezado externo que realmente cableaste. El ejemplo siguiente está sintácticamente completo, pero los valores SITE deben coincidir con el cableado físico de tu placa antes de programar el hardware.
BLOCK RESETPATHS;
BLOCK ASYNCPATHS;
FREQUENCY PORT "clk_25mhz" 25.0 MHz;
LOCATE COMP "clk_25mhz" SITE "G2";
IOBUF PORT "clk_25mhz" IO_TYPE=LVCMOS33;
LOCATE COMP "mic_bclk" SITE "B11";
IOBUF PORT "mic_bclk" IO_TYPE=LVCMOS33 DRIVE=8;
LOCATE COMP "mic_ws" SITE "A10";
IOBUF PORT "mic_ws" IO_TYPE=LVCMOS33 DRIVE=8;
LOCATE COMP "mic_sd" SITE "B10";
IOBUF PORT "mic_sd" IO_TYPE=LVCMOS33;
LOCATE COMP "led_run" SITE "K4";
IOBUF PORT "led_run" IO_TYPE=LVCMOS33 DRIVE=8;
LOCATE COMP "led_stop" SITE "M3";
IOBUF PORT "led_stop" IO_TYPE=LVCMOS33 DRIVE=8;
LOCATE COMP "led_activity" SITE "J3";
IOBUF PORT "led_activity" IO_TYPE=LVCMOS33 DRIVE=8;
Compilar y ejecutar
Crea primero un directorio de compilación:
mkdir -p build
1) Analizar el diseño
verilator --lint-only -Wall -Wno-DECLFILENAME voice_led_top.v tb_voice_led_top.v
2) Ejecutar el banco de pruebas
verilator -Wall -Wno-DECLFILENAME --binary tb_voice_led_top.v voice_led_top.v
./obj_dir/Vtb_voice_led_top
3) Sintetizar para ECP5
yosys -p "read_verilog voice_led_top.v; synth_ecp5 -top voice_led_top -json build/voice_led_top.json"
4) Colocar y rutear
nextpnr-ecp5 \
--85k \
--json build/voice_led_top.json \
--lpf ulx3s_voice_led.lpf \
--textcfg build/voice_led_top.config
5) Empaquetar el bitstream
ecppack build/voice_led_top.config build/voice_led_top.bit
6) Programar la placa
openFPGALoader -b ulx3s build/voice_led_top.bit
Método de validación
Este proyecto solo hace una afirmación limitada sobre el comportamiento del hardware: que el diseño puede detectar una ráfaga de audio fuerte y corta y conmutar LEDs bajo ajustes adecuados de umbral y temporización.
Procedimiento de validación
Usa este método para validar la afirmación:
- Validación estática
- Ejecuta el lint de Verilator.
-
Evidencia: no hay errores de sintaxis ni de elaboración.
-
Validación de comportamiento
- Ejecuta el banco de pruebas proporcionado.
-
Evidencia:
- el arranque muestra
led_run=0 led_stop=1 - la primera ráfaga válida conmuta a
led_run=1 led_stop=0 - la segunda ráfaga durante el bloqueo no conmuta
- la tercera ráfaga después del bloqueo vuelve a conmutar
- el arranque muestra
-
Validación de implementación
- Ejecuta Yosys, nextpnr-ecp5 y ecppack.
-
Evidencia:
- se crea la netlist JSON
- la colocación y el ruteo se completan
- el bitstream se genera correctamente
-
Validación en hardware
- Programa la ULX3S.
- Pronuncia una ráfaga corta y fuerte cerca del micrófono.
- Evidencia:
led_activityparpadea durante el hablaled_runyled_stopconmutan solo después de una ráfaga con duración aceptable- ráfagas repetidas inmediatas dentro del bloqueo no conmutan el estado
Evidencia esperada
Patrón esperado de salida de consola en simulación:
Initial state: led_run=0 led_stop=1After burst 1: led_run=1 led_stop=0After burst 2 during holdoff: led_run=1 led_stop=0After burst 3: led_run=0 led_stop=1
La evidencia en hardware debe ser un comportamiento visual directo de los LEDs coherente con la lógica anterior.
Puesta en marcha del hardware
Prueba A: confirmar relojes generados
Si tienes un osciloscopio o analizador lógico:
- Comprueba que
mic_bclkesté activo - Comprueba que
mic_wsconmute más lentamente quemic_bclk
Prueba B: línea base en silencio
Con una sala silenciosa:
led_activitydebería permanecer mayormente en OFF- Los LEDs de estado RUN/STOP deberían mantenerse estables
Prueba C: ráfaga hablada corta
Habla cerca del micrófono:
led_activitydebería parpadear durante la ráfaga- una ráfaga válida debería conmutar RUN/STOP
Prueba D: comportamiento de bloqueo
Habla de nuevo inmediatamente:
led_activitypuede parpadear- RUN/STOP no debería conmutar durante el bloqueo
Prueba E: comportamiento tras el bloqueo
Espera aproximadamente un segundo y luego habla de nuevo:
- el estado debería volver a conmutar
Ajuste
Si el detector es demasiado sensible o no lo suficiente, ajusta estas constantes en voice_led_top.v:
ENV_THRESHOLD- aumenta si el ruido activa la actividad
- disminuye si no se detecta el habla
BURST_MIN_SAMPLES- disminuye si se ignoran ráfagas cortas
- aumenta si golpes o clics activan conmutaciones
BURST_MAX_SAMPLES- disminuye si sonidos largos de fondo activan conmutaciones
- aumenta si tus ráfagas habladas son más largas
HOLDOFF_SAMPLES- aumenta para suprimir conmutaciones repetidas
- disminuye si la interfaz se siente demasiado lenta
Nota educativa de validación
Antes de la publicación, este caso superó la compuerta automatizada de validación de Prometeo con estado PASS. Para este perfil FPGA/ULX3S, los bloques Verilog sintetizables se comprobaron con Yosys (read_verilog) y el conjunto de diseño/pruebas Verilog se analizó con Verilator. El validador también comprobó la estructura de los bloques de código, opciones de comandos ASCII seguras para copiar/pegar, pilas no compatibles y la disponibilidad de la cadena de herramientas ULX3S/ECP5 (yosys, nextpnr-ecp5, ecppack, openFPGALoader).
Esta validación confirma la sintaxis y la compatibilidad de herramientas para el código publicado, pero no sustituye las pruebas físicas en tu revisión exacta de placa ULX3S, archivo de restricciones de pines y cableado real.
Nota educativa de seguridad
Nota educativa de seguridad
Este proyecto es un experimento educativo de audio FPGA de bajo voltaje. No lo uses para controlar maquinaria peligrosa, tensión de red, calentadores, motores, dispositivos médicos ni ningún sistema crítico para la seguridad. Los detectores de voz/ruido pueden activarse falsamente por habla, golpes, ventiladores, música u otros sonidos. Si más adelante añades relés o controladores de potencia, usa aislamiento y circuitería de control adecuados.
Solución de problemas
Ningún LED responde
Comprueba:
- Que la placa se programó correctamente
- Que
clk_25mhzcoincide con el pin de reloj real de la ULX3S - Que los pines de los LED coinciden con tu hardware
- Que el LPF coincide con la revisión de tu placa
led_activity siempre en OFF
Causas posibles:
- micrófono sin alimentación
- cableado incorrecto de
mic_sd - falta
mic_bclkomic_ws - umbral demasiado alto
Acciones:
- verifica 3.3 V en el micrófono
- verifica tierra común
- mide
mic_bclkymic_ws - baja
ENV_THRESHOLD
led_activity siempre en ON
Causas posibles:
mic_sdflotante- mala conexión a tierra
- umbral demasiado bajo
- temporización I2S incorrecta
Acciones:
- acorta los cables
- asegura la tierra
- sube
ENV_THRESHOLD - confirma que
L/Restá fijado a un nivel válido
La actividad funciona, pero RUN/STOP nunca conmuta
Esto normalmente significa que la temporización de la ráfaga está fuera de la ventana aceptada.
Acciones:
- baja
BURST_MIN_SAMPLES - sube
BURST_MAX_SAMPLES - prueba ráfagas habladas más cortas y consistentes
nextpnr-ecp5 falla
Normalmente esto es un problema de restricciones.
Acciones:
- verifica el mapa de pines de la ULX3S
- mueve las señales a pines de E/S válidos
- actualiza el LPF a la revisión real de tu placa y a los pines de cabecera elegidos
Mejoras
Posibles extensiones:
- Añadir una entrada de anulación con pulsador
- Añadir salida de depuración UART para la envolvente y cambios de estado
- Mejorar el detector de envolvente con promedio o lógica de pico-decaimiento
- Detectar diferentes patrones de ráfaga en lugar de conmutación simple
- Añadir un controlador con transistor o MOSFET para indicadores de mayor tamaño y bajo voltaje
No conectes pines de FPGA directamente a cargas de alta corriente.
Lista de verificación final
- [ ] Usé una Radiona ULX3S (Lattice ECP5-85F) con un micrófono MEMS I2S INMP441
- [ ] El micrófono está alimentado con 3.3 V
- [ ] Las tierras están compartidas
- [ ]
L/Restá fijado a un nivel lógico definido - [ ] Mi LPF coincide con mi cableado real de la ULX3S
- [ ] El lint de Verilator se completó sin errores fatales
- [ ] El banco de pruebas mostró el comportamiento de conmutación esperado
- [ ] La síntesis con Yosys se completó correctamente
- [ ] nextpnr-ecp5 se completó correctamente para
--85k - [ ] El bitstream se programó con
openFPGALoader -b ulx3s - [ ]
led_activityresponde al habla cercana o a ráfagas de sonido fuerte - [ ]
led_runyled_stopconmutan solo con ráfagas válidas - [ ] Ajusté las constantes de umbral y temporización para mi configuración
Si todos los elementos se cumplen, tienes un proyecto práctico de FPGA ULX3S para captura de audio I2S y control simple de LED activado por ráfagas.
<div class="amazon-affiliate">
<p><strong>Encuentra este producto y/o libros sobre este tema en Amazon</strong></p>
<p><a class="amazon-affiliate-btn" href="https://amzn.to/4mt8r4C" target="_blank" rel="nofollow sponsored noopener">Ir a Amazon</a></p>
<p class="amazon-affiliate-disclaimer">Como afiliado de Amazon, gano con las compras que cumplan los requisitos. Si compras a través de este enlace, ayudas a mantener este proyecto.</p>
</div>
Quiz rápido

Ingeniero Superior en Electrónica de Telecomunicaciones e Ingeniero en Informática (titulaciones oficiales en España).