

Nivel: Básico – Aprende a usar un transistor NPN como interruptor para controlar un motor CC, incluyendo el uso de un diodo flyback.
Objetivo y caso de uso
En este caso práctico, construirás un circuito de conmutación de lado bajo (low-side switch) utilizando un transistor NPN para controlar de forma segura un motor CC de alta corriente a partir de una señal de control de baja potencia.
Esta topología es muy útil en el mundo real por varias razones:
* Conectar microcontroladores de bajo voltaje (como un Arduino o Raspberry Pi) con cargas de mayor potencia que requieren fuentes de alimentación externas.
* Automatizar pequeños ventiladores de refrigeración en sistemas de control de temperatura.
* Construir sistemas de tracción básicos para robótica de aficionados.
* Proteger la delicada lógica de control de los dañinos picos de voltaje generados por cargas inductivas.
Resultado esperado:
* Aplicar una señal de control de 5 V al circuito de base saturará el transistor.
* El motor CC girará mientras el transistor puentea su conexión a tierra.
* El diodo flyback disipará de forma segura el retroceso inductivo del motor cuando se apague la señal de control.
* Voltaje de base medible (VBE) de alrededor de 0.7 V, voltaje colector-emisor (VCE) cercano a cero indicando saturación, y corriente de base (IB) y corriente de colector (IC) claramente observables.
Público objetivo y nivel: Principiantes en electrónica y aficionados que buscan controlar cargas mecánicas de forma segura.
Materiales
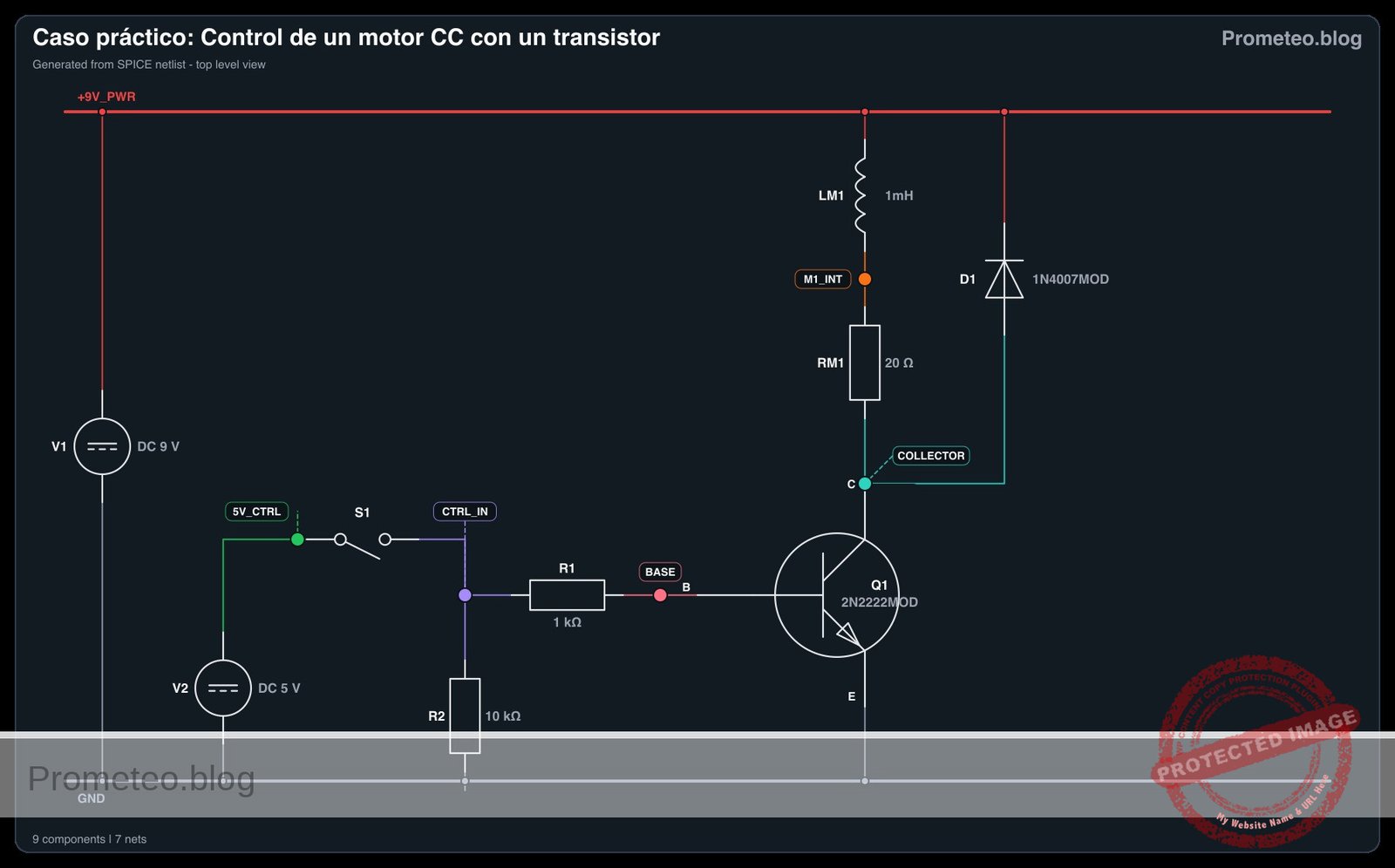
V1: Fuente de alimentación CC de 9 V, función: fuente de alimentación principal para el motor CCV2: Fuente de alimentación CC de 5 V, función: fuente de señal de control simuladaSW1: Interruptor SPST, función: control manual de la señal de baseQ1: Transistor NPN 2N2222, función: interruptor de lado bajo para controlar el motorM1: Motor CC de 9 V, función: carga mecánica inductivaD1: Diodo 1N4007, función: diodo flyback para suprimir los picos inductivosR1: Resistencia de 1 kΩ, función: resistencia limitadora de corriente de baseR2: Resistencia de 10 kΩ, función: resistencia pull-down para la señal de control
Guía de conexionado
V1: se conecta entre los nodos9 V_PWRy0V2: se conecta entre los nodos5 V_CTRLy0SW1: se conecta entre los nodos5 V_CTRLyCTRL_INR2: se conecta entre los nodosCTRL_INy0R1: se conecta entre los nodosCTRL_INyBASEQ1: El colector se conecta al nodoCOLLECTOR, la base se conecta al nodoBASE, el emisor se conecta al nodo0M1: se conecta entre los nodos9 V_PWRyCOLLECTORD1: El ánodo se conecta al nodoCOLLECTOR, el cátodo se conecta al nodo9 V_PWR
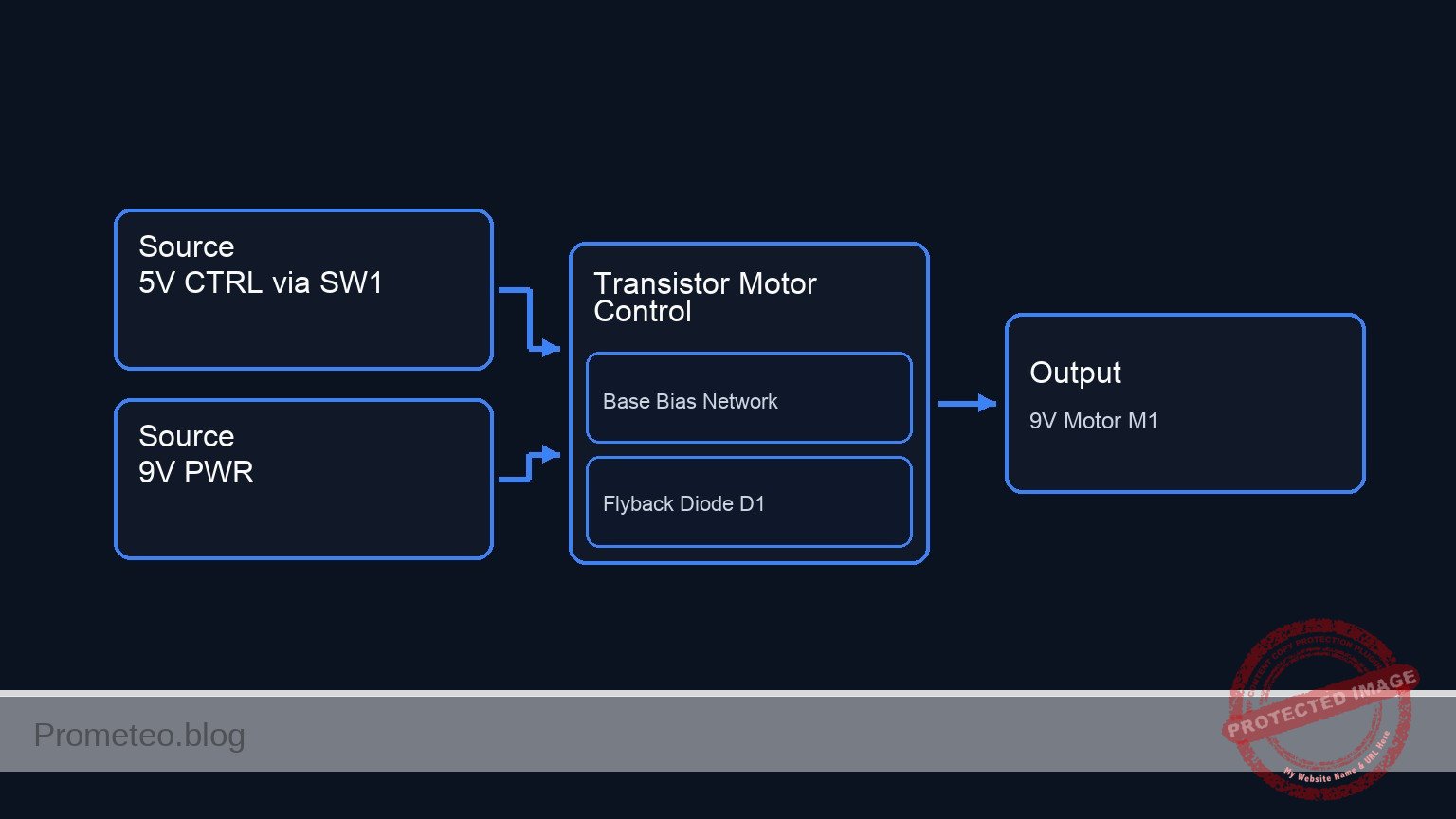
Diagrama de bloques conceptual
Esquemático
[ 5 V_CTRL ] --> [ SW1 ] --(CTRL_IN)--+--> [ R1: 1 kΩ ] --(BASE)--> [ Q1:Base ]
| |
[ R2: 10 kΩ ] |
| |
GND |
|
[ 9 V_PWR ] --+--> [ M1: 9 V Motor ] -----------------+--(COLLECTOR)--> [ Q1:Collector ] --( )-- [ Q1:Emitter ] --> GND
| |
+--> [ D1: 1N4007 (Cath->Anode) ] -----+
Diagrama eléctrico
Mediciones y pruebas
- Verificar la señal de control: Cierra
SW1. Mide el voltaje en el nodoCTRL_INcon respecto al nodo0. Debería marcar 5 V. Cuando está abierto, debería marcar 0 V debido a la resistencia pull-downR2. - Medir el voltaje base-emisor (VBE): Con
SW1cerrado, coloca las puntas de prueba de tu multímetro entre el nodoBASEy el nodo0. Deberías medir aproximadamente 0.7 V, confirmando que la unión base-emisor del transistor está polarizada en directa. - Medir el voltaje colector-emisor (VCE): Con el motor en marcha (
SW1cerrado), mide el voltaje entre el nodoCOLLECTORy el nodo0. Una lectura de alrededor de 0.2 V indica que el transistor está operando correctamente en la región de saturación. CuandoSW1está abierto, este voltaje debería subir a 9 V. - Medir la corriente de base (IB): Configura tu multímetro para medir corriente (rango de mA) y colócalo en serie entre
R1y el nodoBASE. Deberías medir una pequeña corriente (alrededor de 4.3 mA). - Medir la corriente de colector (IC): Coloca tu amperímetro en serie entre
M1y el nodoCOLLECTOR. Medirás la corriente real consumida por el motor (que podría variar desde decenas hasta cientos de mA dependiendo del motor específico).
Netlist SPICE y simulación
Netlist SPICE de referencia (ngspice) — extractoNetlist SPICE completo (ngspice)
* DC Motor Control with a Transistor
.width out=256
* Power Supplies
V1 9V_PWR 0 DC 9
V2 5V_CTRL 0 DC 5
* Switch SW1 modeled as a voltage-controlled switch to simulate user interaction
S1 5V_CTRL CTRL_IN SW_CTRL 0 mySW
.model mySW SW(Vt=2.5 Vh=0.5 Ron=0.1 Roff=100MEG)
* Control signal to simulate the user pressing the switch
V_SW_CTRL SW_CTRL 0 PULSE(0 5 10m 1u 1u 245m 1s)
* Resistors
R2 CTRL_IN 0 10k
R1 CTRL_IN BASE 1k
* Transistor Q1 (Low-side switch)
Q1 COLLECTOR BASE 0 2N2222MOD
* ... (truncated in public view) ...Copia este contenido en un archivo .cir y ejecútalo con ngspice.
* DC Motor Control with a Transistor
.width out=256
* Power Supplies
V1 9V_PWR 0 DC 9
V2 5V_CTRL 0 DC 5
* Switch SW1 modeled as a voltage-controlled switch to simulate user interaction
S1 5V_CTRL CTRL_IN SW_CTRL 0 mySW
.model mySW SW(Vt=2.5 Vh=0.5 Ron=0.1 Roff=100MEG)
* Control signal to simulate the user pressing the switch
V_SW_CTRL SW_CTRL 0 PULSE(0 5 10m 1u 1u 245m 1s)
* Resistors
R2 CTRL_IN 0 10k
R1 CTRL_IN BASE 1k
* Transistor Q1 (Low-side switch)
Q1 COLLECTOR BASE 0 2N2222MOD
* Motor M1 modeled as a series inductor and resistor representing the inductive mechanical load
LM1 9V_PWR M1_INT 1mH
RM1 M1_INT COLLECTOR 20
* Flyback diode D1
D1 COLLECTOR 9V_PWR 1N4007MOD
* Component Models
.model 2N2222MOD NPN(IS=1E-14 VAF=100 BF=200 IKF=0.3 XTB=1.5 BR=3 CJC=8E-12 CJE=25E-12 TR=100E-9 TF=400E-12 ITF=1 VTF=2 XTF=3 RB=10 RC=0.3 RE=0.2)
.model 1N4007MOD D(IS=7.02767n RS=0.0341512 N=1.80803 EG=1.11 XTI=3.0 BV=1000 IBV=5e-08 CJO=1e-11 VJ=0.7 M=0.5 FC=0.5 TT=1e-07)
* Simulation Commands
.op
.tran 0.1m 250m
.print tran V(CTRL_IN) V(COLLECTOR) V(BASE) I(LM1)
.endResultados de Simulación (Transitorio)

Show raw data table (2541 rows)
Index time v(ctrl_in) v(collector) v(base) lm1#branch 0 0.000000e+00 5.000400e-04 9.000000e+00 5.000490e-04 1.799750e-11 1 1.000000e-06 5.000400e-04 9.000000e+00 5.000490e-04 1.800624e-11 2 2.000000e-06 5.000400e-04 9.000000e+00 5.000490e-04 1.800815e-11 3 4.000000e-06 5.000400e-04 9.000000e+00 5.000490e-04 1.800528e-11 4 8.000000e-06 5.000400e-04 9.000000e+00 5.000490e-04 1.799050e-11 5 1.600000e-05 5.000400e-04 9.000000e+00 5.000490e-04 1.798412e-11 6 3.200000e-05 5.000400e-04 9.000000e+00 5.000490e-04 1.797999e-11 7 6.400000e-05 5.000400e-04 9.000000e+00 5.000490e-04 1.798801e-11 8 1.280000e-04 5.000400e-04 9.000000e+00 5.000490e-04 1.797977e-11 9 2.280000e-04 5.000400e-04 9.000000e+00 5.000490e-04 1.799637e-11 10 3.280000e-04 5.000400e-04 9.000000e+00 5.000490e-04 1.799685e-11 11 4.280000e-04 5.000400e-04 9.000000e+00 5.000490e-04 1.799640e-11 12 5.280000e-04 5.000400e-04 9.000000e+00 5.000490e-04 1.799689e-11 13 6.280000e-04 5.000400e-04 9.000000e+00 5.000490e-04 1.799636e-11 14 7.280000e-04 5.000400e-04 9.000000e+00 5.000490e-04 1.799685e-11 15 8.280000e-04 5.000400e-04 9.000000e+00 5.000490e-04 1.799639e-11 16 9.280000e-04 5.000400e-04 9.000000e+00 5.000490e-04 1.799690e-11 17 1.028000e-03 5.000400e-04 9.000000e+00 5.000490e-04 1.799645e-11 18 1.128000e-03 5.000400e-04 9.000000e+00 5.000490e-04 1.799690e-11 19 1.228000e-03 5.000400e-04 9.000000e+00 5.000490e-04 1.799640e-11 20 1.328000e-03 5.000400e-04 9.000000e+00 5.000490e-04 1.799689e-11 21 1.428000e-03 5.000400e-04 9.000000e+00 5.000490e-04 1.799641e-11 22 1.528000e-03 5.000400e-04 9.000000e+00 5.000490e-04 1.799690e-11 23 1.628000e-03 5.000400e-04 9.000000e+00 5.000490e-04 1.799640e-11 ... (2517 more rows) ...
Errores comunes y cómo evitarlos
- Omitir el diodo flyback (
D1): Un motor CC es una carga inductiva. Cuando el transistor se apaga, el colapso del campo magnético crea un pico de voltaje masivo. Sin el diodo, este pico destruirá instantáneamente el transistor. Coloca siempre un diodo en paralelo con el motor, polarizado en inversa en relación con el flujo normal de corriente. - Olvidar la resistencia de base (
R1): Conectar una señal de control de 5 V directamente a la base del transistor consumirá una corriente excesiva, destruyendo inmediatamente la fuente de control (ej., tu microcontrolador) o el transistor. Usa siempre una resistencia limitadora de corriente. - Intercambiar los pines de colector y emisor: Insertar el transistor NPN al revés resultará en una ganancia de corriente (hFE) muy pobre. El motor apenas girará y el transistor se calentará significativamente porque no puede saturarse por completo. Revisa siempre la hoja de datos (datasheet) para comprobar el pin-out de tu transistor específico.
Solución de problemas
- Síntoma: El motor no gira cuando el interruptor está cerrado.
- Causa: El transistor no se enciende o al motor le falta alimentación.
- Solución: Mide el voltaje en el nodo
BASE. Si es 0 V, revisa tu interruptorSW1y la resistenciaR1. Mide el nodo9 V_PWRpara asegurarte de que la fuente de alimentación principal está activa.
- Síntoma: El transistor se calienta muchísimo muy rápido.
- Causa: El transistor está operando en la región activa/lineal en lugar de saturarse por completo, generalmente porque la corriente de base (IB) es demasiado baja para la corriente de colector (IC) requerida.
- Solución: Calcula la corriente de base requerida (IC / hFE). Si la corriente es demasiado baja, reduce el valor de
R1(ej., a 470 Ω o 330 Ω) para permitir más corriente de base, asegurando la saturación.
- Síntoma: El microcontrolador se reinicia o se comporta de forma errática cuando el motor se enciende/apaga.
- Causa: Ruido eléctrico de las escobillas del motor o caídas de voltaje en la línea de alimentación.
- Solución: Asegúrate de que la fuente de alimentación del motor (
V1) esté completamente separada de la fuente de la lógica de control (V2), compartiendo solo la conexión de tierra (0). Añade un condensador cerámico de 100 nF entre los terminales del motor para suprimir el ruido de las escobillas.
Posibles mejoras y extensiones
- Control de velocidad por PWM: Reemplaza el interruptor manual (
SW1) por una señal de modulación por ancho de pulsos (PWM) de un microcontrolador. Al encender y apagar rápidamente el transistor, puedes controlar suavemente la velocidad de rotación del motor en lugar de simplemente tenerlo encendido o apagado. - Optoaislamiento para una mayor seguridad: Introduce un optoacoplador entre la señal de control y la base del transistor. Esto separa físicamente el circuito de control de bajo voltaje del circuito del motor de mayor voltaje mediante luz, proporcionando un aislamiento eléctrico total y evitando que las fallas catastróficas lleguen a tu placa lógica.
Más Casos Prácticos en Prometeo.blog
Encuentra este producto y/o libros sobre este tema en Amazon
Como afiliado de Amazon, gano con las compras que cumplan los requisitos. Si compras a través de este enlace, ayudas a mantener este proyecto.
Quiz rápido

Ingeniero Superior en Electrónica de Telecomunicaciones e Ingeniero en Informática (titulaciones oficiales en España).

