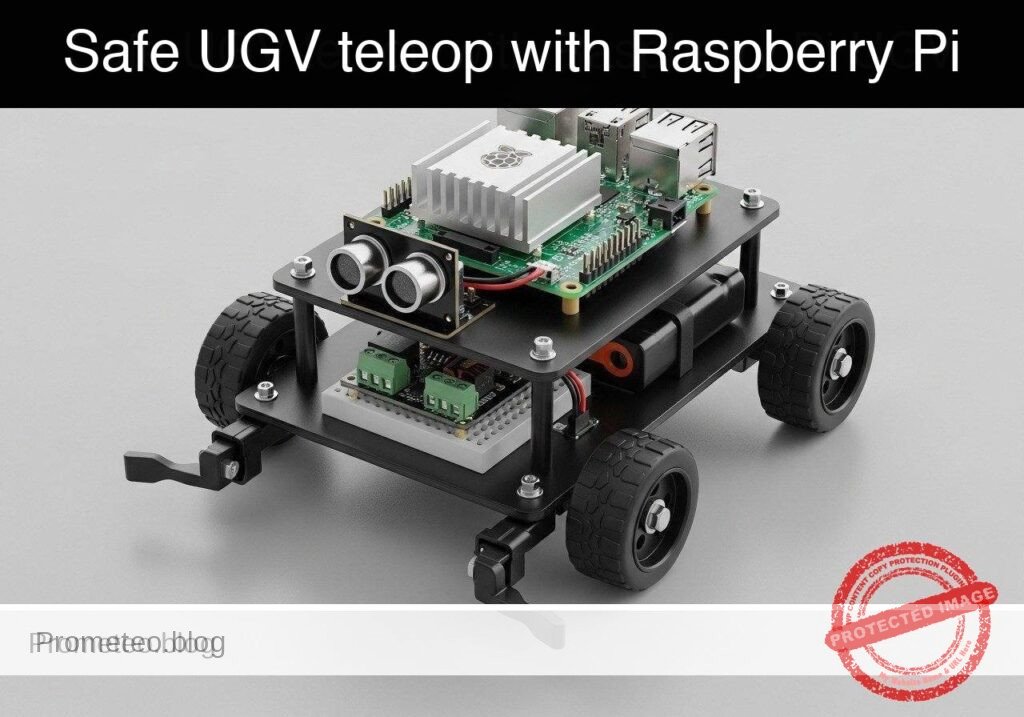
Practical case: safe UGV teleop with Raspberry Pi
A fail-safe teleoperated Unmanned Ground Vehicle UGV prototype that accepts directional commands but automatically halts forward motion if a physical front…
A fail-safe teleoperated Unmanned Ground Vehicle UGV prototype that accepts directional commands but automatically halts forward motion if a physical front…
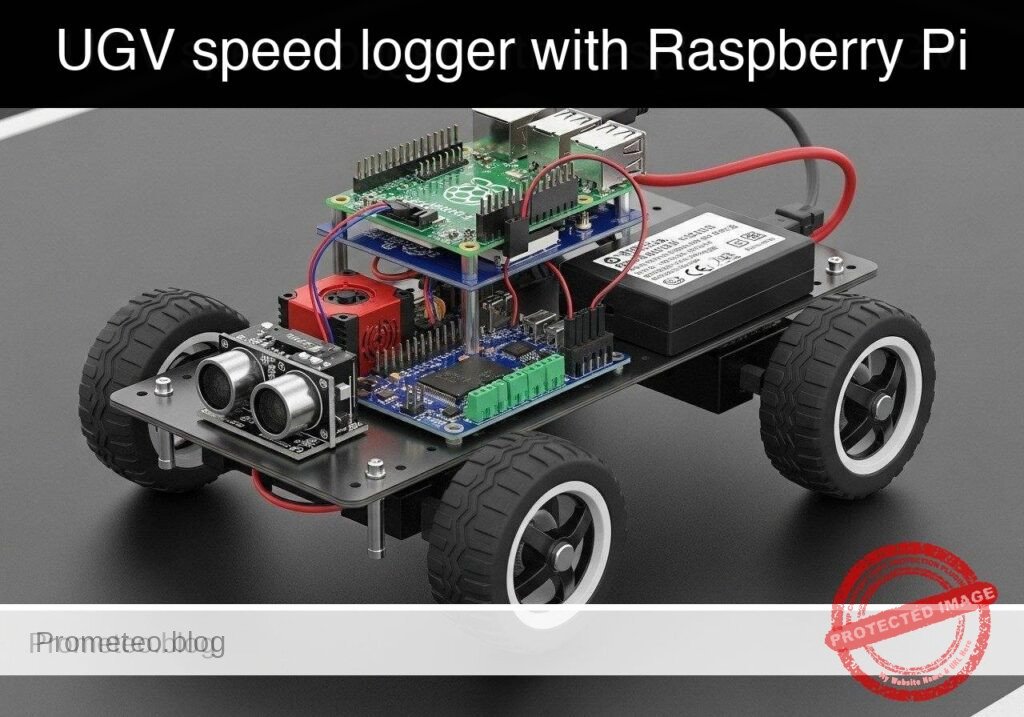
A Python-based speed logging tool for a Raspberry Pi 5 UGV that systematically sweeps motor power via a PCA9685 PWM HAT and TB6612FNG driver. It records…
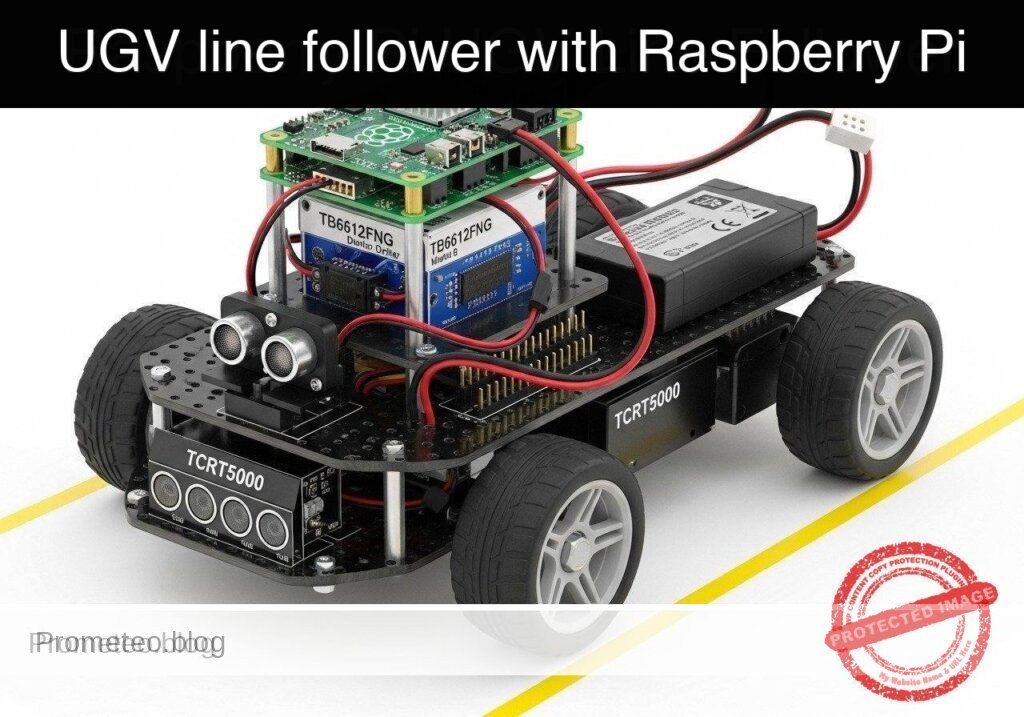
You will build a track-guided Unmanned Ground Vehicle UGV prototype that utilizes infrared reflectance sensors to autonomously navigate a high-contrast path.…
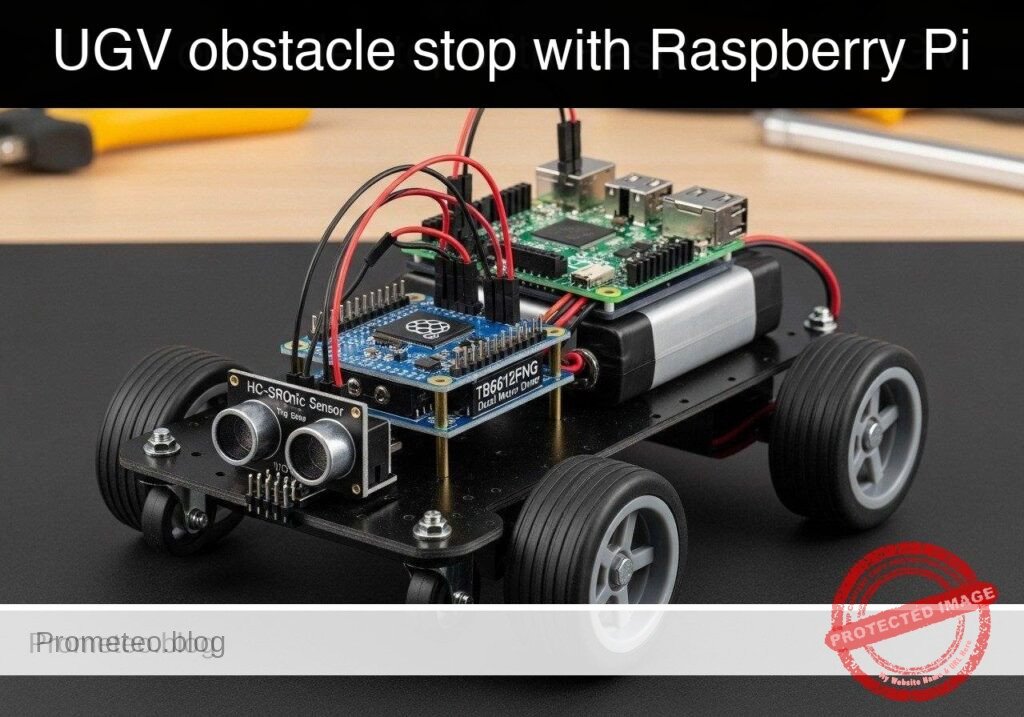
A prototype 2WD automated guided vehicle AGV that continuously drives forward and executes a low-latency emergency halt when an obstacle is detected within…
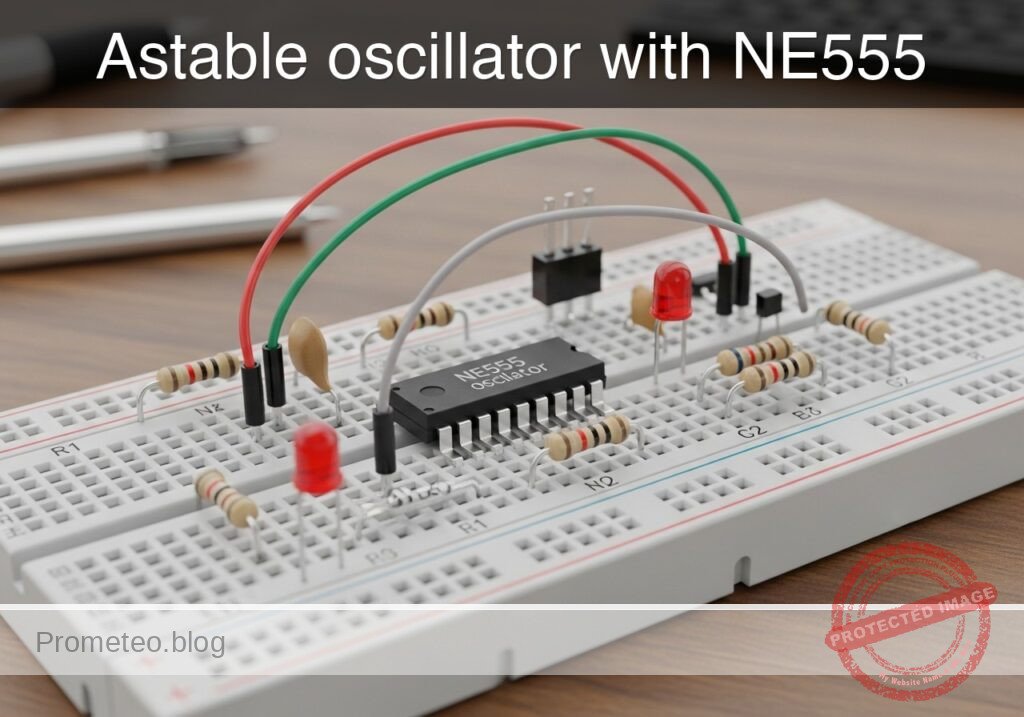
Level: Basic — Build an NE555 astable timer that blinks an LED at a visible frequency.
## Objective and use case
You will build a simple astable timer with…

Level: Basic – Build a monostable timer circuit using the NE555 IC to control an LED output for a set duration.
## Objective and use case
In this practical…
