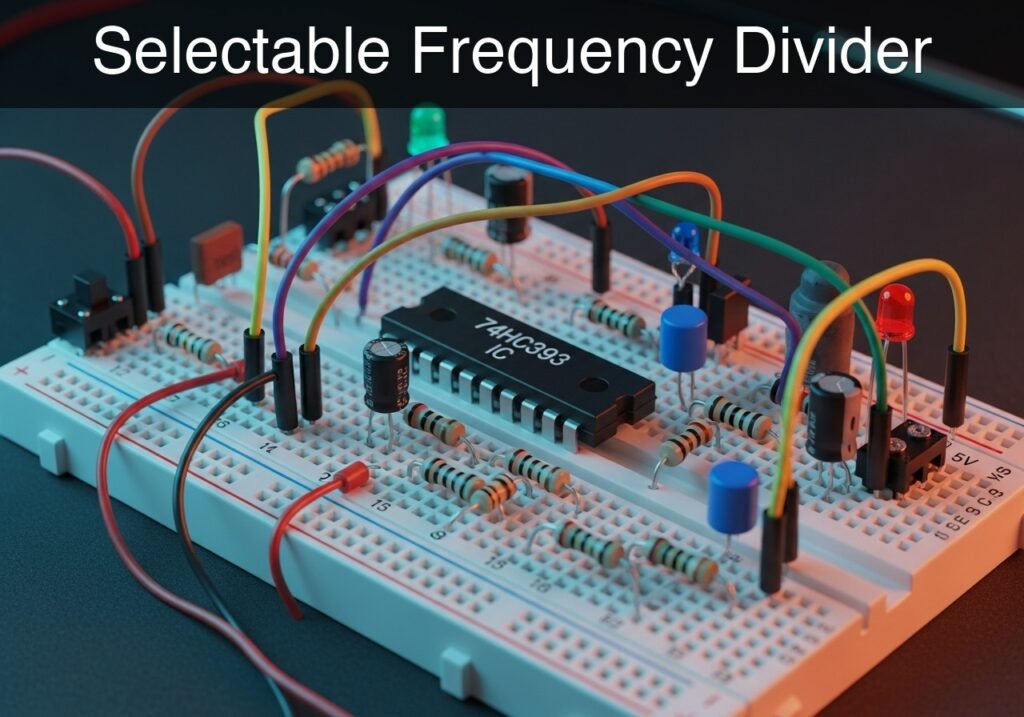
Practical case: Selectable Frequency Divider
Level: Medium – Build a binary frequency divider using a 74HC393 ripple counter with a selectable output stage.
Level: Medium – Build a binary frequency divider using a 74HC393 ripple counter with a selectable output stage.
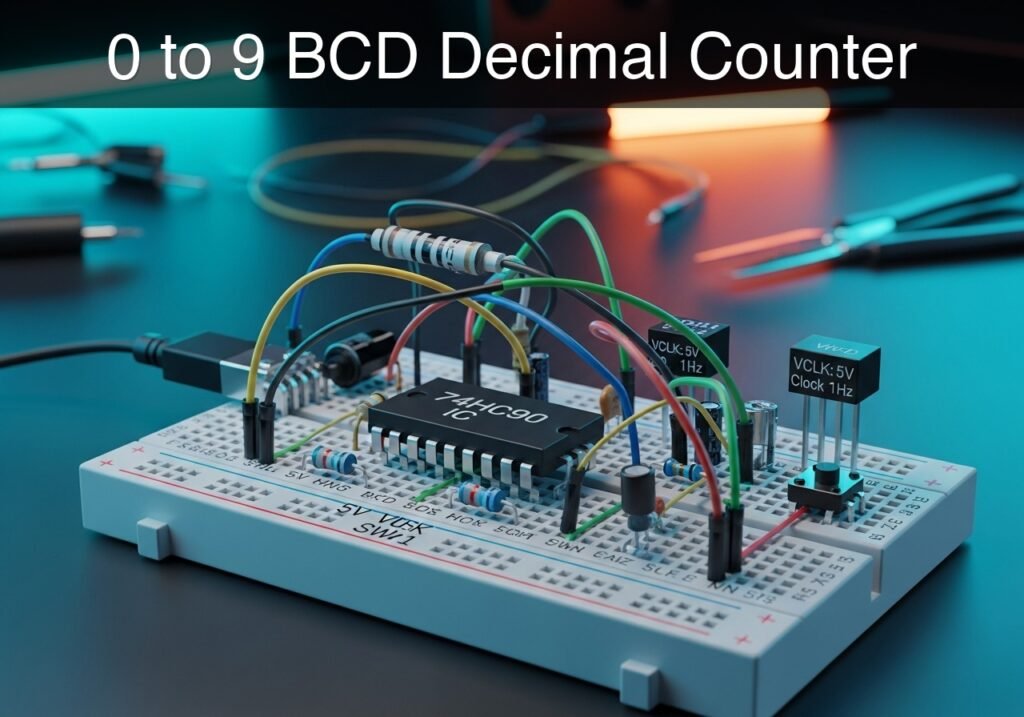
Level: Medium | Build a 0-9 BCD counter using the 74HC90 IC to visualize binary progression via LEDs.
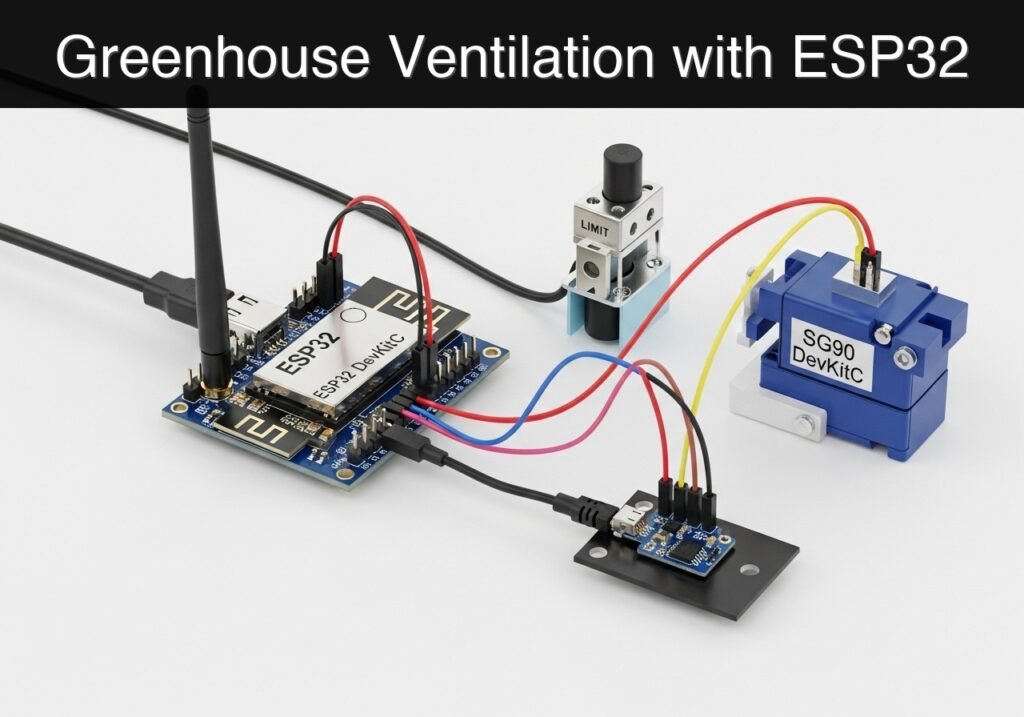
A local web-controlled servo mechanism that regulates a model greenhouse vent. It integrates a limit switch for precise mechanical zero-positioning to…

You will build a directional doorway people counter using dual infrared IR break-beam sensors to track individuals entering and exiting a room, broadcasting…
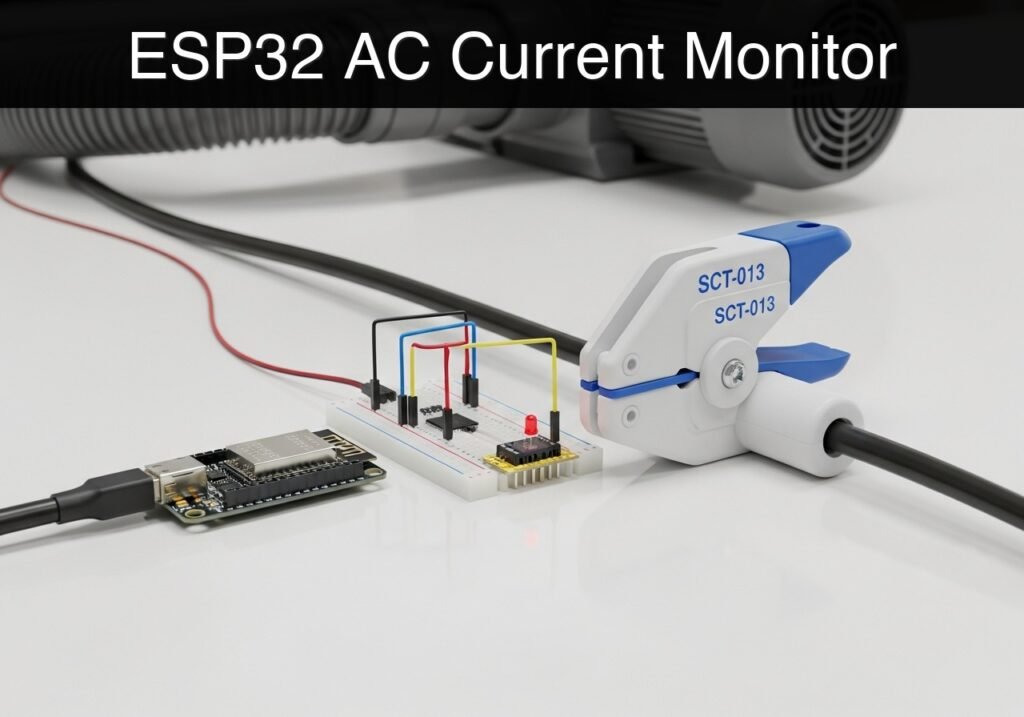
A non-invasive dust collector current monitor that logs the AC power draw of your workshop’s dust collection system to establish a baseline electrical usage…
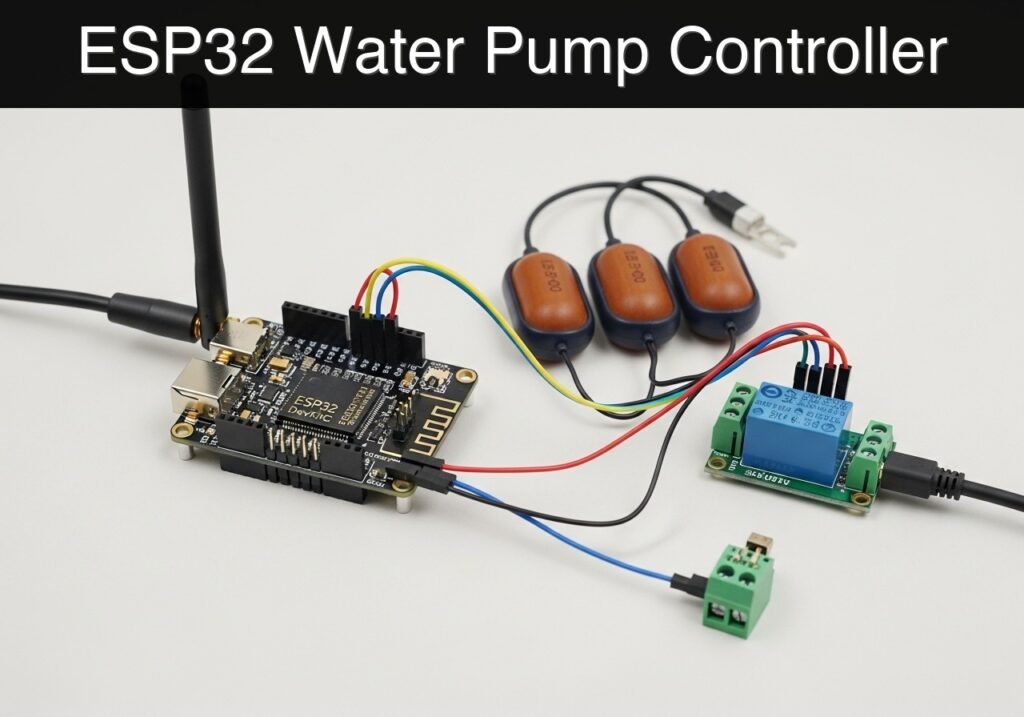
A smart, web-enabled water pump controller that monitors tank levels via physical float switches and automatically cuts power to prevent catastrophic…
